Изо1бретение относится к программному управлению .металлорежущими станками и может -быть использовано в програ ммноуправляемых силовых установках с шаговым приводом, содержащих программное устройство, «а выходе которого управляющая информация -представлена в виде непрерывной последовательности импульсов.
Известны устройства программного управления, содержащие датчик, контролирующий положение объекта, и блок сравнения заданного 1програ,м,мой положения с действительным. При этом коррекция положения объекта производится после остановки отработки программы лутем подачи на шаговый 1приеод необходимого числа дополнительных импульсов, вырабатываемых соответствующими вычислительными устройствами. Таким образом, предусматривается коррекция только отрицательных ошибок, т. е. когда после отработки программы, перемещение объекта не достигнет заданного положения. Однако положительная ошибка, т. е. когда объект в .процессе отработки лрограм мы перемещается на расстояние больше заданного, в таких устройствах может быть компенсирована путем перемещения объекта ,в обратном направлении, что в процессе отработки яа ставках с программным уп.равлением недопустимо 1 ,и 2.
Наиболее близким к данному изобретению техническим рещением я-вляется устройство для программного управления шаговым приводом, -содержащее блок «вода программы, коммутатор фаз, генератор .импульсов и датчик пере1мещений, подключ-енный через формирователь импульсов ко -входу счетчика рассогласования 3.
В этом устройстве уменьщение ощибок пере.мещений объекта, вызванных дн1намическими свойствами привода, производится путем снижения частоты регулируемого генератора, и только при отсутствии ошибок частота импульсов управления может быть увеличена.
Это обстоятельство прив-одит к существенному снижению производительности обработки на станке. Следует отметить также, что в этом известном устройстве невозможно устранение ошибок, вызванных наличием зазоров в кинематической паре «ходовой винт-тайка стола станка, так как датчи1К перемещений установлен на ходовом винте и не контролирует действительное положение объекта -управления, а также положительных ощибок. Эти обстоятельства существенно снижают точность устройства.
Цель из01бретен1ия - повышение точности
устройства п-утем уменьщен-ия систематических
и случайных погрещностей, вызванных динамическими свойствами привода и изменегьчем усилий в приводе в процессе обработки.
Достигается это тем, что в устройство введены счетчики полоЖИтельНОй и отрицательной ошибок и блак задерЖКи, вход и выход которого подключепы к выходу блока вывода арограмМы, соединенно му с первым входом коммутатора фаз, и залускающему вх-оду генератора им/пулысов соответственно. Выход ге-нератора нмпульсоз через счетчик отрицательных Oimni6oK подключен ко второму входу комимутатора фаз и через последовательно соединенные счетчи1К раасогласований, подсоединенный « отключающему входу генератора импульсов, и очетчи1К /положительных ошибок - к третьему входу комимутатора фаз.
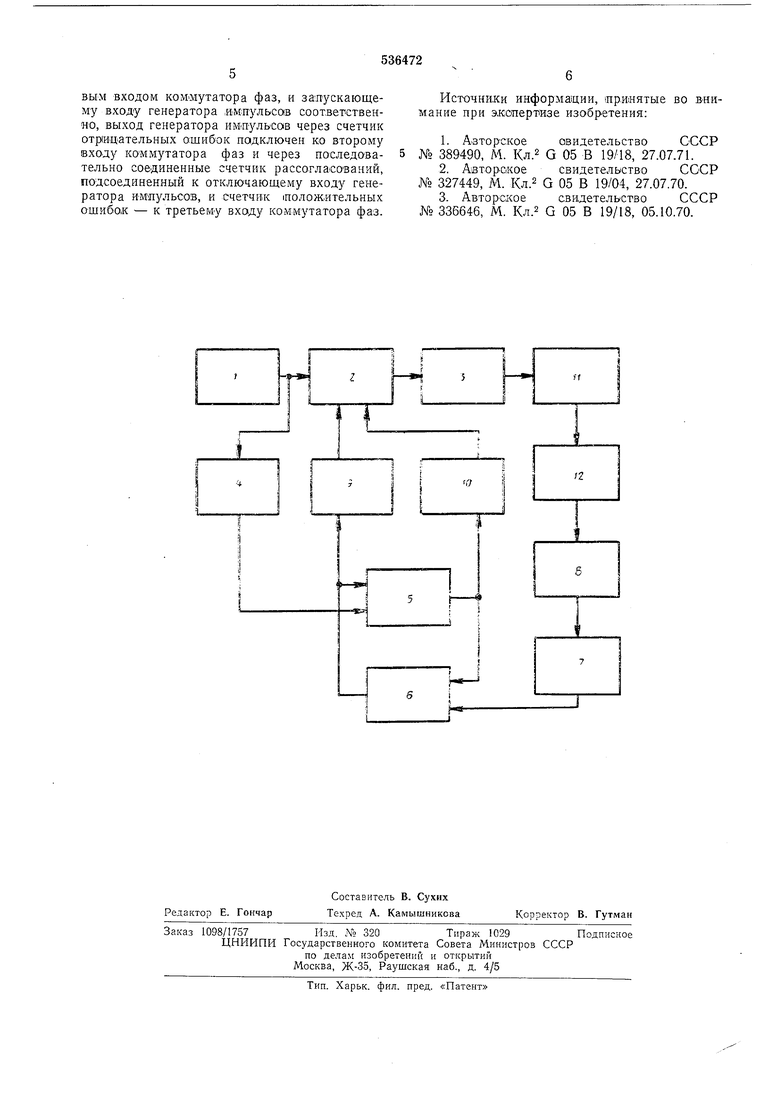
На чертеже изображена фун1кциональная схема предлагаемого устройства. Она содержит блок ввода программы /, коммутатор фаз 2, шаговый при)вад 3, блок задержки 4, генератор имоульсов 5, счетчик рассогласований 6, формирО ватель импульсов 7, датчик перемещений 8, счетчи1ки лолож ительной ошибки 9 и отрицательной ошибки 10, гидроусилитель мощности // и объект управления 12.
Устройство ра|ботает следующим образом. Каждый имлульс -программы, поступающий с выхода блока ввода програ ммы / на вход коммутатора фаз 2, вызьввает поворот шагового лривода 3 на оди« ша1Г. Шаговый лривод через гидроусилитель мощности 11 перемещает объект упра1ВЛения 12 (стол станка) на определенное дискретное расстояние, которое измеряется датчиком 8, и ща выходе формирователя 7 появляется пОСладовательность импульсов, число которых пролорционально отношению величины дискретного леремещения стола (шага лривода) и разрешающей способности датчика леремещевий 5. Таким образо1М, после каждого .имоульса управляющей программы на выходе формиравателя имлульсов 7 появляется последовательность импульсов, которые фиксируются .в счетчике рассогласований 6, число разрядов которого определяется указанным выще отнощением. Сигнал переполнения йа выходе счетчика 6 появляется только при нормальной отработке шага и на отклю чающлй -вход генератора импульсов 5, «а запуокаюЩИЙ вход которого через элемент задержки 4 поступает имлульс «затуск с выхода блока ввода програм-мы 1. Время выдержки регулируется в зависимости от периода следования импульсов управляющей лрограммы. При отсутствии имлульса лереполнени.я ic выхода счетчика рассогласований 6 имлульс с выхода блока задержки 4 запускает генератор импульсов 5, на выходе которого появляется лоследовательность импульсов, поступающих на второй вход счетчика .рассогласований 6. Сигнал переполнения счетчика ратеоглаоаваний 6 останавливает работу генератора имтульсов 5, а число импульсов, необходимое для лерелолнения, фиксируется в счетчике отрицательной ошибки 10, число разрядов которого равно числу разрядов счетчика 6. Таким образом, в счетчике W нака ПЛИ1вается Ч1исло имлульсов, пролорциональное отрицательной ошибке. Сигнал переполнения н.а выходе счетчика 10, соответствующий моменту достижения ошибки, равной Дмс,кретности перемещении, поступает на один из дополнительных входов коммутатора фаз 2 и далее отрабатывается шаговым приводом 3, как дополнительный и млульс программы.
Появление двух и .М1пульсов (переполнения
/на выходе счетчика рассогласований 6 соответствует моменту достижения (положительной ошибки, равной дискретности перемещений. Эти импульсы фиксируются в счетчике положительной ошибки 9, выходной сигнал которого поступает на другой дополнительный вход коммутатора фаз 2. Этот сигнал запрещает прохождение очередного имлульса программы через коммутатор фаз 2. Запрет отработки одного имлульса исходной лрограммы лозволяет устранить положительную ошибку, равную дискретности шага лривода именно в момент накопления такой ошибки, причем для этого не требуется изменение направления движения на обратное.
Предлагаемое устройство программного управления шаговым при)водом позволяет уменьшить как отрицательные, так и положительные ошибки iB отработке программы, без
импзльсно-фазового преобразования управляющей информации, до значен1ия дискретности шага привода, что в конечном итоге существенно повышает точность обработки на существующих непрецезионных станках с
программным управлением, а также позволяет « пользовать шаговый привод лри оптимальных скоростях лодачи, определяемых режимами , что существенно ловыщает производительность обработки.
Технико-экономическая эффективность внедрения предлагаемой системы определяется как результат сокращения потерь от брака, снижения эксплуатационных расходов на наладку станков, повышения производительности обработки.
Формула изобретения
Устройство для программного управления шаговым лриводом, содержащее блок ввода программы, коммутатор фаз, генератор импульсов и датчик перемещений, подключенный через формирователь имлульсов ко входу счетчи,юа рассогласования, отличающееся тем что, с целью повыщения точности устройства, в него введены счетчики положительной и отрицательной ошибок и блок задержки, вход и выход которого подключены к выходу
блока ввода програм мы, соеди«е1Нному с первым входом коммутатора фаз, и залускающему входу генератора .имэтульсав соответственно, выход генератора имлульсов через счетчик отрицательных ошибок подключен ко второму входу коммутатора фаз и через последовательно соединенные счетчик рассогласований, подсоединенный к отключающему входу генератора имяульсов, и счетчик лолож-ительных ошибок - к третьему входу коммутатора фаз.
Источники информации, пр.ииятые во в-нимание при эк:аперт1изе изобретения:
1.Азторское свидетельство СССР № 389490, М. Кл.2 G 05 В 19/18, 27.07.71.
2.Авторское свидетельство СССР № 327449, М. Кл. G 05 В 19/04, 27.07.70.
3.Авторское свидетельство СССР № 336646, М. Кл.2 G 05 В 19/18, 05.10.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ С ШАГОВЫМПРИВОДОМ | 1972 |
|
SU336646A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Устройство для программного управления шаговым приводом | 1986 |
|
SU1399704A1 |
| Устройство для программного управления положением объекта | 1987 |
|
SU1520479A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Устройство для программного управления | 1976 |
|
SU566241A1 |
| Устройство для программного управ-лЕНия пРиВОдОМ | 1979 |
|
SU840812A1 |
| Устройство для программного управления станком | 1976 |
|
SU593191A1 |
| Устройство для программного управления шаговым двигателем | 1976 |
|
SU601666A1 |
