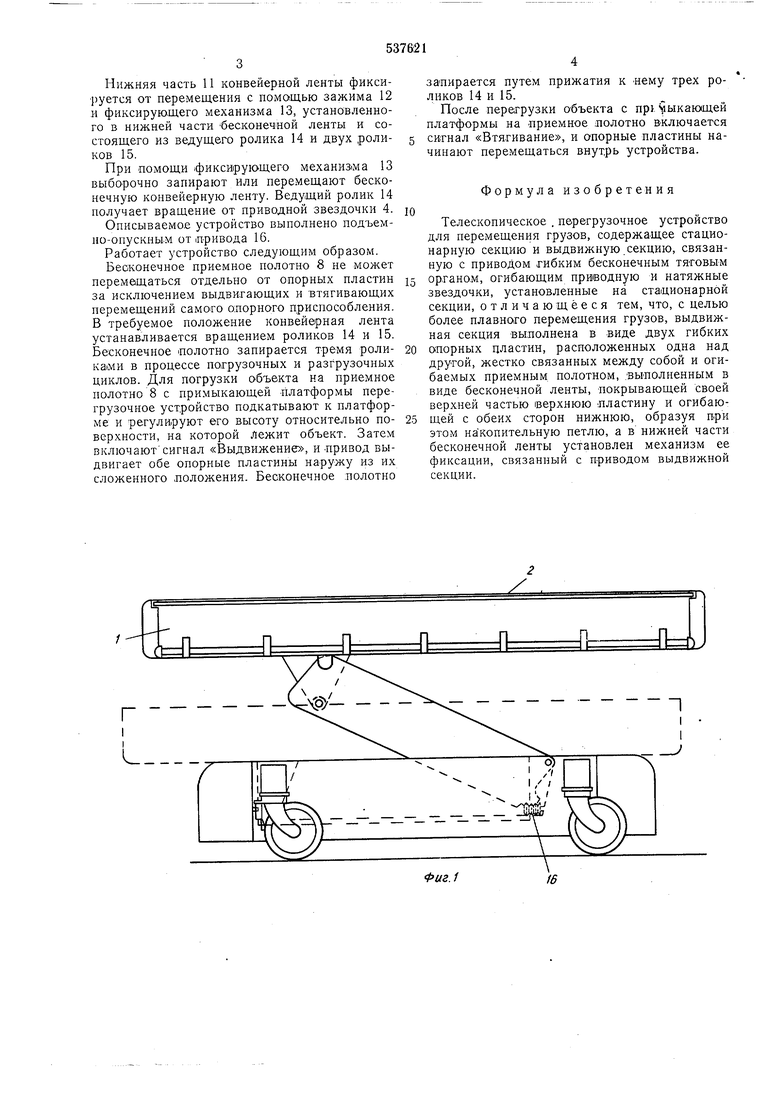
Нижняя часть 11 конвейерной ленты фиксируется от перемещения с помощью зажима 12 и фиксирующего механизма 13, установленного в нижней части бесконечной ленты и состоящего из ведущего ролика 14 и двух роликов 15.
При помощи фиксирую-щего механизима 13 выборочно запирают или перемещают бесконечную конвейерную ленту. Ведущий ролик 14 получает вращение от приводной звездочки 4.
Описываемое устройство выполнено подъемно-опускным от привода 16.
Работает устройство следующим образом.
Бесконечное приемное полотно 8 не может перемещаться отдельно от опорных пластин за исключением выдвигающих и втягивающих перемещений самого олорного приспособления. В требуемое положение конвейерная лента устанавливается вращением роликов 14 и 15. Бесконечное полотно запирается тремя роликами в процессе погрузочных и разгрузочных циклов. Для погрузки объекта на приемное полотно 8 с примыкающей платформы перегрузочное устройство подкатывают к платформе и регулируют его высоту относительно поверхности, на которой Лежит объект. Затем включаютсигнал «Выдвижение, и привод выдвигает обе опорные пластины наружу из их сложенного .положения. Бесконечное лолотно
запирается путем прижатия к «ему трех роликов 14 и 15.
После перегрузки объекта с npi рыкающей платформы на приемное полотно включается сигнал «Втягивание, и опорные пластины начинают перемещаться внутрь устройства.
Формула изобретения
Телескопическое . перегрузочное устройство для перемещения грузов, содержащее стационарную секцию и выдвижную.секцию, связанную с приводом гибким бесконечным тяговым органом, огибающим приеодную и натяжные звездочки, установленные на стационарной секции, отличающееся тем, что, с целью более плавного перемещения грузов, выдвижная секция выполнена в виде двух гибких опорных пластин, расположенных одна над другой, жестко связанных между собой и огибаемых приемным, полотном, .выполненным в виде бесконечной ленты, покрывающей своей верхней частью верхнюю пластину и огибающей с обеих сторон нижнюю, образуя при этом накопительную петлю, а в нижней части бесконечной ленты установлен механизм ее фиксации, связанный с приводом выдвижной секции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2235051C2 |
| Вертикальная конвейерная система | 1990 |
|
SU1738743A1 |
| ЛЕНТОЧНЫЙ ТРАНСПОРТЕР, СОСТАВЛЕННЫЙ ИЗ ТЕЛЕСКОПИЧЕСКИ ВЫДВИЖНЫХ СЕКЦИЙ | 1935 |
|
SU50059A1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1995 |
|
RU2083454C1 |
| Поточная линия по производству сварочных электродов | 1978 |
|
SU921738A1 |
| Устройство для перемещения груза | 1987 |
|
SU1481151A1 |
| УСТРОЙСТВО для ВЫГРУЗКИ СЫПУЧИХ ГРУЗОВ из КРЬ1ТЬ!Х ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1969 |
|
SU235624A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА ДЛЯ ДОБЫЧИ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2463450C1 |

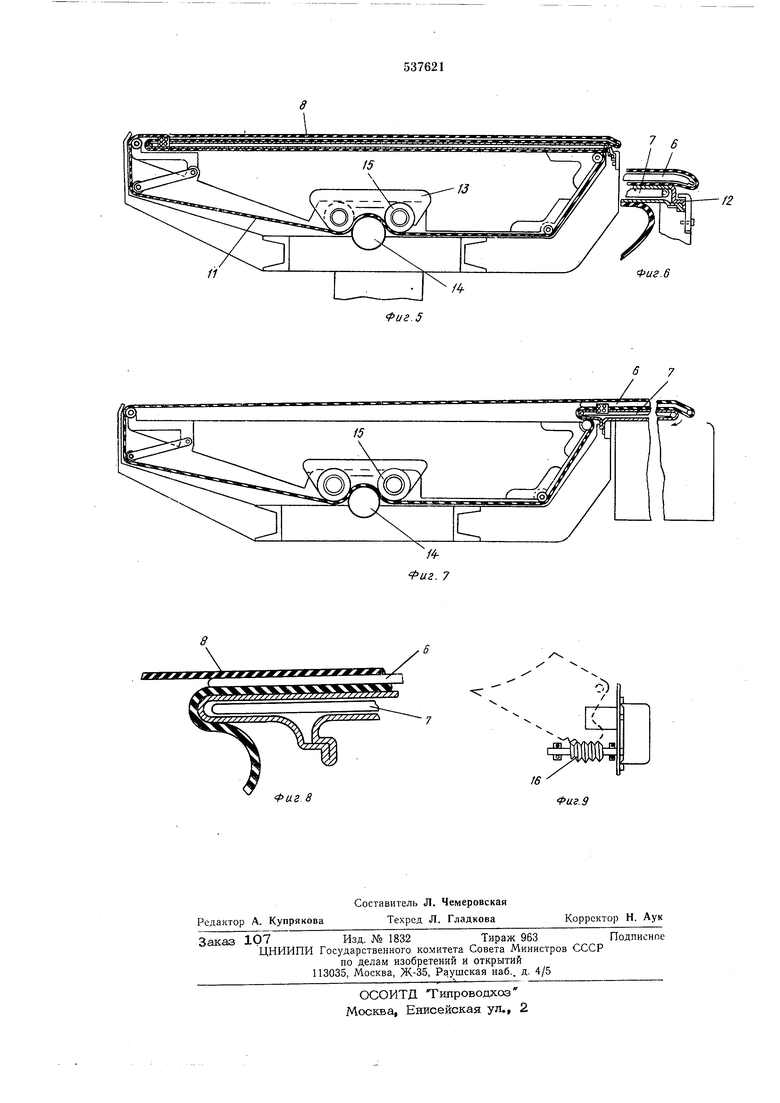
Фиг. 8
XX.
Фиг. 9
