Изобретение относится к областм подъемно-транспортного оборудования, а именно к устройстваМ для расформирования штабелей.
Известно устройство для расформирования стопок ящиков, содержащее (каркас, на котором установлена поворотная рама с механизмом ее наклона, на .которой нодзижио смо;1тирована трузовая каретка с вилками, механизм подъема грузовой каретки и аппаратуру управления. Однако оно -имеет низкую производительно.сть 1.
Цель изобретения - повышение лро зводительности труда. Это достигается тем, что механизм подъема грузовой каретки зыт.олнен в виде наклонного двухцепного конвейера, цепи которого связаны поперечинами, взаплюдействующими с грузовой .кареткой при наклогном положении поворотной рамы.
На фиг. I изображено уетройетво для расформирования стопок ящиков, оГлиий вид; на фи:Г. 2-5 - схемы .лоследоватгльност: вза.имодействия грузовой каретки с механизмом лодъема и копирам при ее подъеме и опускании.
Каркае / (фиг. 1) представляет собой пространственную стальную сварнмо кснструкпию, на которой размещена поворотная рама 2 с механизмом на клона, леханизм подъема грузовой каретк, гварпй;1ый выключатель, .копир, }1а:1разляющие и аплэратура управле П1я.
Рама 2 состоит из вертикальных стоек корытообразного профиля, соединенных г;о кокца.м стяжками, и в нижней части шаримрно при.креплена IK каркасу /. Вертикальные стойки снабжены ролпкам 3, енижающ1)м;1 потери на трение лрн перемещении столк ящиков вдоль стоек и ноключаюнщми иовреждение лакокрасоч}1ого покрытия ящи.ков., Проушинами 4 рама 2 шарпирно соединяется с шатунами кривошилно-щатунного механизма наклона 5.
В 1корытообразных направляющих верт)1кальных -етоек 2 ъ. катках перемеи1,ается грузовая каретка 6, снабженная вилками 7 для раеформируемой стопки ящнкоз. Ролики 8 грузовой каретки взаимодействуют с копиром при ее опуакании, а упор 9 - с механизмом подъема грузовой кареткн.
Механизм подъема грузовой каретки выполнен в виде наклонного конвейера, состоящего нз двух параллель 1ых замкнутых испей /(, связа;11 ых между собой поперечина ми // и огибающих спаренные обводные 12 и ведуи1:ие 13 звездочки, и имеющего элeктpo ieХагшческий привол, состоящий из электродвнт-ателя, редуктора. гнб.кой передачн. Крутящий момент от редуктора 14 к валу велущей звездочки 13 передается цепью /5.
Аварийный выключатель, исключающий оирокидываиие ящиков с разрядными грузами в случае задерж-ки схода верхних ящи1коз со стопКи (иапример, ири примерзании ящика iK ящи,ку), состоит из двуплечего рычага 16, конечного выключателя /7 и подпружиненного упора 18.
Плавный и одновременный с .поворотной рамой 2 возврат прузовой каретки б в исходное положение после выдачи последнего ящика из расформируемой стопки обеспечивается копиром. Неподвижная часть 19 копира жестко закреплена на раме 2, а подвижная 20 имеет возможность поворачиваться вокруг оси 2} и В исходном положении опирается на пружинный упор 22.
Сходящие €0 стап.ки одиночные ящики принимаются рольганговой секцией 23, обеспечивающей легкий, без дополнительного трения, сход ящиков, а склиз 24 сиижает скорость перемещения и передает ящик на тра;нспортирующий орган 25.
Устройство работает следующим образом.
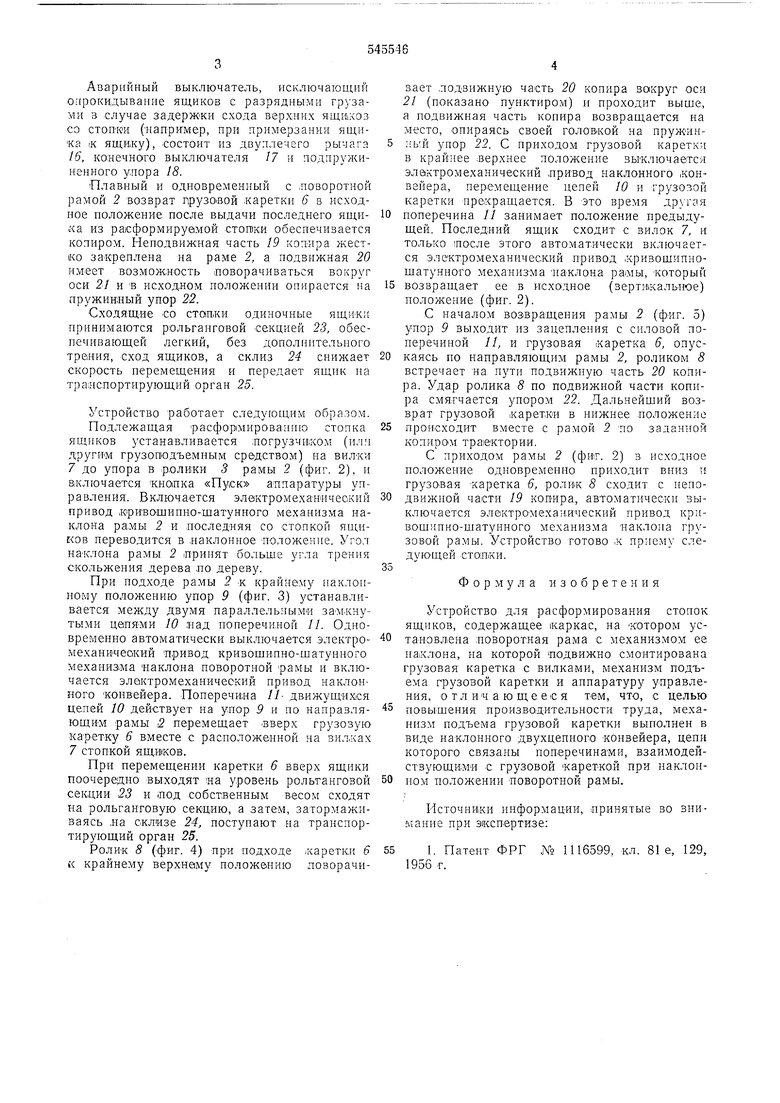
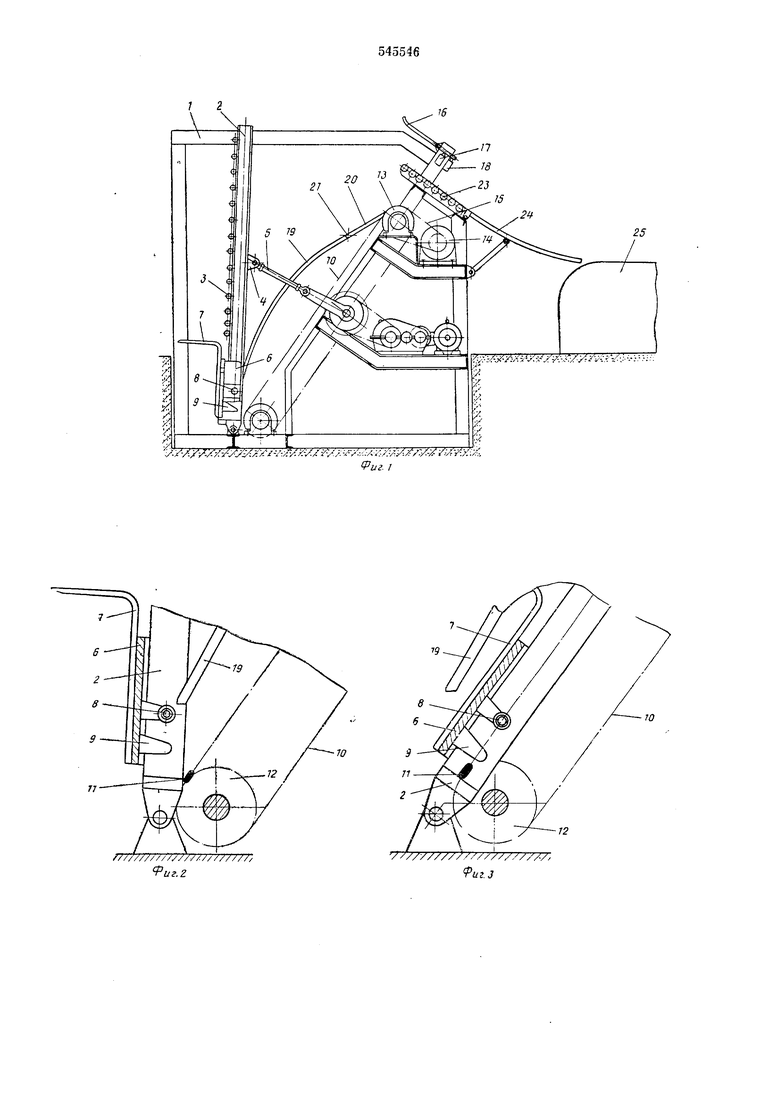
Подлежащая расфор1мироваиию стопка ящиков устанавливается логрузчиншм (илп другим грузоподъемным средством) на вилки 7 до упора в ролики 3 рамы 2 (фиг. 2), и в,ключается кнопка «Пуск аппаратуры управления. Включается электромеханический привод юриБо-щипно-щатунного механизма наклона рамы 2 и .последняя со стопкой ящиЕ ов переводится в .наклонное положение. Угол наклона рамы 2 принят больше угла трения скольжения дерева по дереву.
При подходе рамы 2 к крайнему иаклопному положению упор 9 (фиг. 3) устанавливается между двумя параллельными залжнутыми цепями 10 иад поперечи.ной 11. Одновременно автоматически выключается электромеханичеокий привод кривошипно-шатунного механизма наклона поворотной рамы и включается электромеханический привод наклонного -конвейера. Поперечина //- движущн.тея цепей 10 действует на упор 9 и по направляющим рамы 3 перемещает -вверх грузовую каретку 6 вместе с расположенной на
7 стопкой ЯЩ.И1КОВ.
При перемещении каретки 6 вверх ящики поочередно выходят на уровень рольганговой секции 23 и лод собсгвенным весом сходят на рольганговую секцию, а .затем, затормаживаясь на склизе 24, постуиают на транспортирующий орган 25.
Ролик 8 (фиг. 4) прИ подходе каретки 6 к крайнему верхнему положению поворачивает .подвижную часть 20 копира вокруг оси 21 (показано пунктиром) и проходит выще, а подвижная часть конира возвращается на место, опираясь своей головкой на пружиниьи упор 22. С приходом грузовой каретки в крайнее iBepxHee положение выключается электромеханический привод наклонного конвейера, перемещение цепей W и грузовой каретки прекращается. В это время другая
поперечина // занимает положение предыдущей. Последний ящик сходит с вилок 7, и только после этого автоматически включается электромеханический .привод .кривощипнощатунного механизма наклона рамы, который
возвращает ее в исходное (верти1кальное) положение (фиг. 2).
С началом возвращения рамы 2 (фиг. 5) упор 9 выходит из зацепления с силовой поперечиной 11, и грузовая каретка 6, опускаясь по направляющим рамы 2, роликом 8 встречает на пути подвижную часть 20 копира. Удар ролика 8 по подвижной части конира смягчается упором 22. Дальнейщий возврат грузовой каретки в нижнее положение
происходит вместе с рамой 2 по заданной копирОМ траектории.
С приходом рамы 2 (фиг. 2) в исходное положение одновременно приходит вниз и грузовая каретка 6, ролик 8 сходит с неподвижной части 19 копира, автоматически выключается элактрОмехан.Ический привод кривощипно-щатунного механизма наклоиа грузовой рамы. Устройство готово .к приему следующей стоики.
Формула изобретения
Устройство для расформирования стопок ящиков, содержащее каркас, на котором установл ена новоротная рама с механизмом ее наклона, на которой подвижно смонтирована грузовая каретка с вилками, механизм подъема грузовой каретки и аппаратуру управления, отличающееся тем, что, с целью
повышения производительности труда, механнзм подъема грузовой каретки выполнен в виде наклонного двухцепного конвейера, цепи которого связаны поперечинами, взаимодействующими с грузовой кареткой при наклонном положении поворотной рамы.
Источники информации, принятые во внимание при экспертизе:
1. Патент ФРГ № 1116599. кл. 81 е, 129, 1956 г.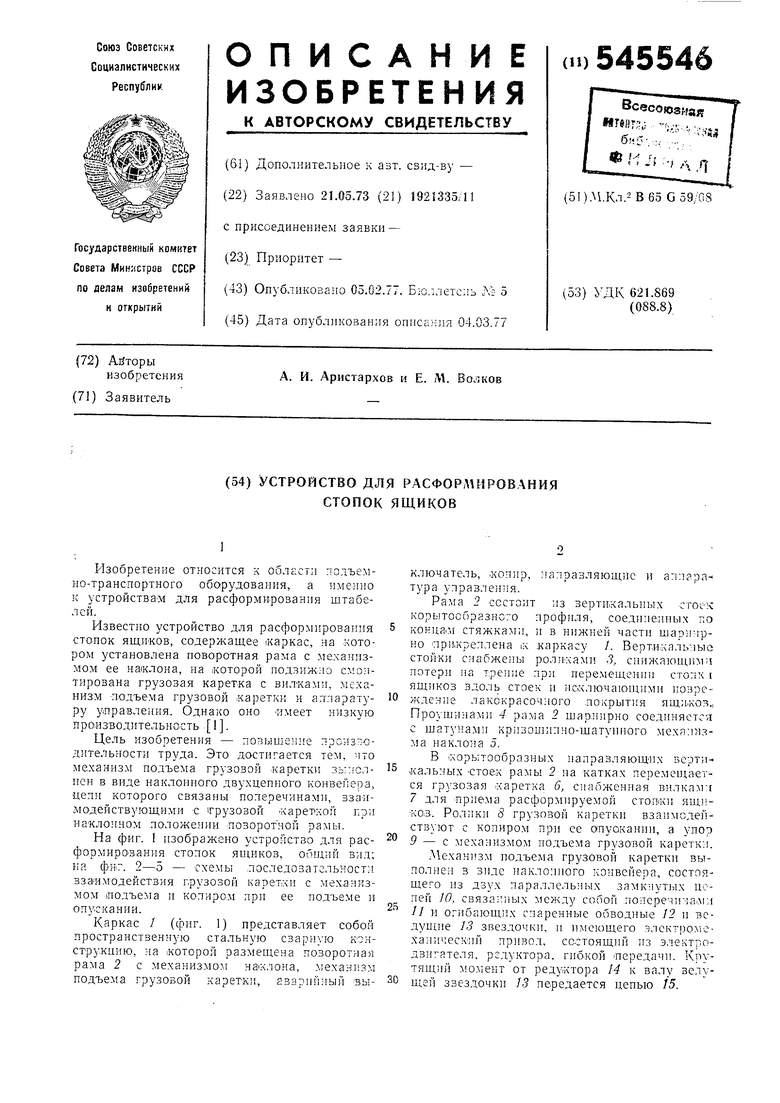
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для закалки деталей | 1974 |
|
SU509651A1 |
| Захватное устройство к погрузчику | 1990 |
|
SU1801942A1 |
| Устройство для пакетирования тарно-штучных грузов | 1977 |
|
SU686960A1 |
| СТРОИТЕЛЬНЫЙ ПОДЪЕЛЬНИК | 1971 |
|
SU302304A1 |
| Секционный конвейер | 1979 |
|
SU947007A1 |
| Устройство для штабелирования штучных грузов | 1983 |
|
SU1224228A1 |
| Конвейерная система для транспортирования изделий на тележках | 1978 |
|
SU791571A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
| Устройство для подачи мотков проволоки | 1982 |
|
SU1050979A1 |
| Линия наклейки ковров из керамических плиток | 1985 |
|
SU1296422A1 |

w
77
///////////
иг.г
g
го
uz.3
22
IX 7J
Уиг Ь
