сигнал рассогласования оирсдслепиого знака (фазы), под действием которого исполнительный элемент 12 поворачивает ось масштабного элемента 8 до тех пор, нока сигнал на входе усилителя 11 не станет равным нулю. При этом напряжение t/2, снимаемое с выхода масштабного элемента 8, будет ноддерживаться постоянным, следовательно, точность системы будет неизменной при уходе крутизны датчика скорости 7.
Аналогичный процесс происходит в системе и при изменении крутизны выходной характеристики задатчика скорости 9.
Точность системы при изменении крутизны выходных характеристик задатчика и датчика скорости повышается но меиьнгей мере в три раза.
Формула изобретения
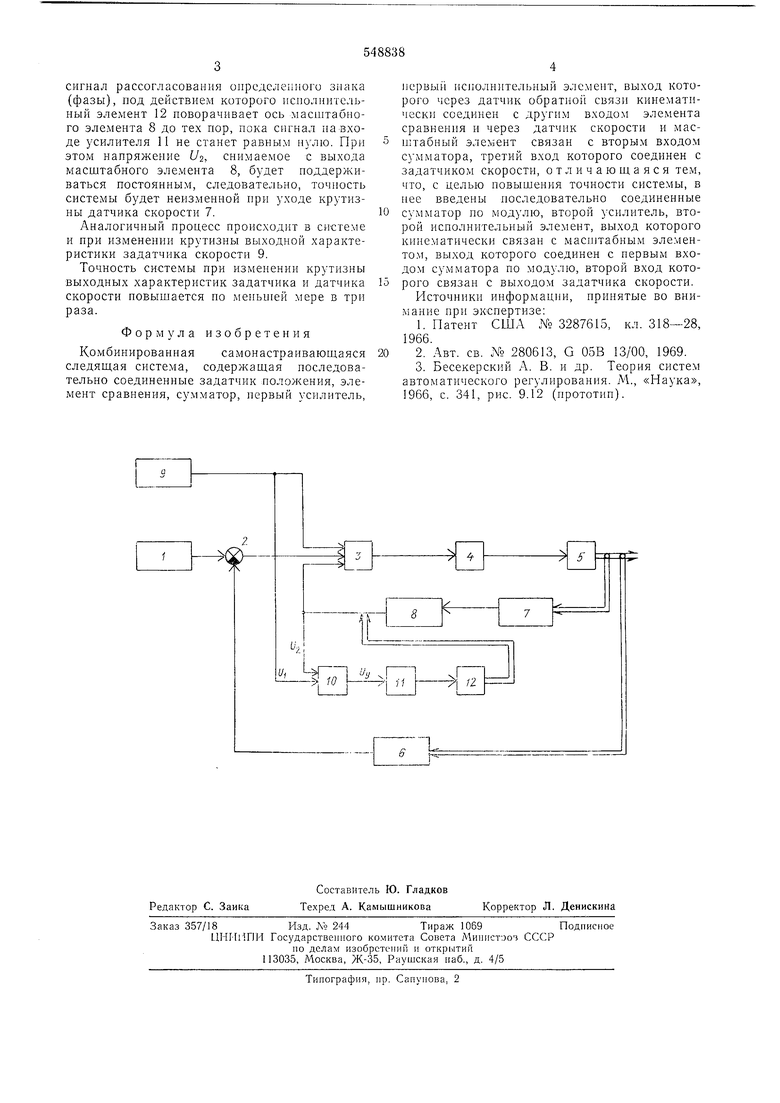
Комбинированная самонастраивающаяся следяш,ая система, содержащая последовательно соединенные задатчик положения, элемент сравнения, сумматор, первый усилитель.
первый исполнительный элемент, выход которого через датчик обратно связи кинематически соединен с другим входом элемента сравнения и через датчик скорости и масштабный элемент связан с вторым входом сумматора, третий вход которого соединен с задатчиком скорости, отличающаяся тем, что, с целью повышения точности системы, в нее введены последовательно соединенные
сумматор по модулю, второй усилитель, второй исполнительный элемент, выход которого кинематически связан с масгптабным элементом, выход которого соединен с первым входом сумматора по модулю, второй вход которого связан с выходом задатчика скорости.
Источники информации, нринятые во внимание при экспертизе:
1. Патент США № 3287615, кл. 318-28, 1966.
2. Авт. св. oVo 280613, G 05В 13/00, 1969.
3. Бесекерский А. В. и др. Теория систем автоматического регулирования. М., «Наука, 1966, с. 341, рис. 9.12 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система комбинированного управления | 1980 |
|
SU881655A1 |
| Устройство автоматического управления | 1981 |
|
SU954927A1 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
| Следящая система | 1979 |
|
SU849135A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования температуры | 1979 |
|
SU840837A1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
, I „I
Jij -jn I.rli;,; .X
