Изобретение относится к нанесению гальванических покрытий и предназначено для переноса деталей из одной ванны в другую.
Известен автооператор для гальванических линий, содержащий раму с опорными катками, на вертикальные стойки которой опираются ролики каретки, приводы горизонтального и вертикального перемещения, а барабан привода вертикального перемещения выполнен в виде двух цилиндров раз- Ных диаметров, основания которых соединены усеченным конусом, связан ный со ufKHBOM каретки бесконечным тросом С1.
Конструкция известного автооператора позволяет изменять скорость вертикального перемещения каретки, но сложность специального привода вертикального перемещения влечет за собой увеличение веса автооператора, что ухудшает его динамическую характеристику.
Известен также автооператор для гальванических линий, содержащий самоходную тележку с приводом, горизонтальную направляющую, механизм прижима подвесок и механизм подъема, выполненный в виде установленных на
вертикальных направляющих двух, снабженных индивидуальными приводами, тележек, несущих на себе грузовахваты, направленные в противоположные стороны оси линии расположения ванн. в известном автооператоре возможно применение стандартных механизмов подъема (таль злектрическал), что упрощает его конструкцию 23.
10
Однако отсутствие механизма изменения скорости не позволяет увеличивать скорость--вертикального перемещения тележки, что снижает производительность работы автоматической
15 линии.
Целью изобретения является увеличение производительности и обеспечения надежной рабо линии.
Указанная цель достигается тем,
20 что автооператор для гешьванических линий, содержащий вертикальные направлякицие, механизм горизонтального перемещения,- механизмл-прижима подвесок, тележки, снабженные индивидуаль25ными приводами с тросами, грузозахватами и упорами, расположенные по оазные стороны центральной оси автооператооа и установленные на вертикальных направляющих, снабжен ползу30нами, установленными на вертикальных
направляющих с возможностью взаимодействия с упорами тележек и напоавляющих, а свобо 1ный конец троса каждого индивидуального привода закреплен на поляуне. .
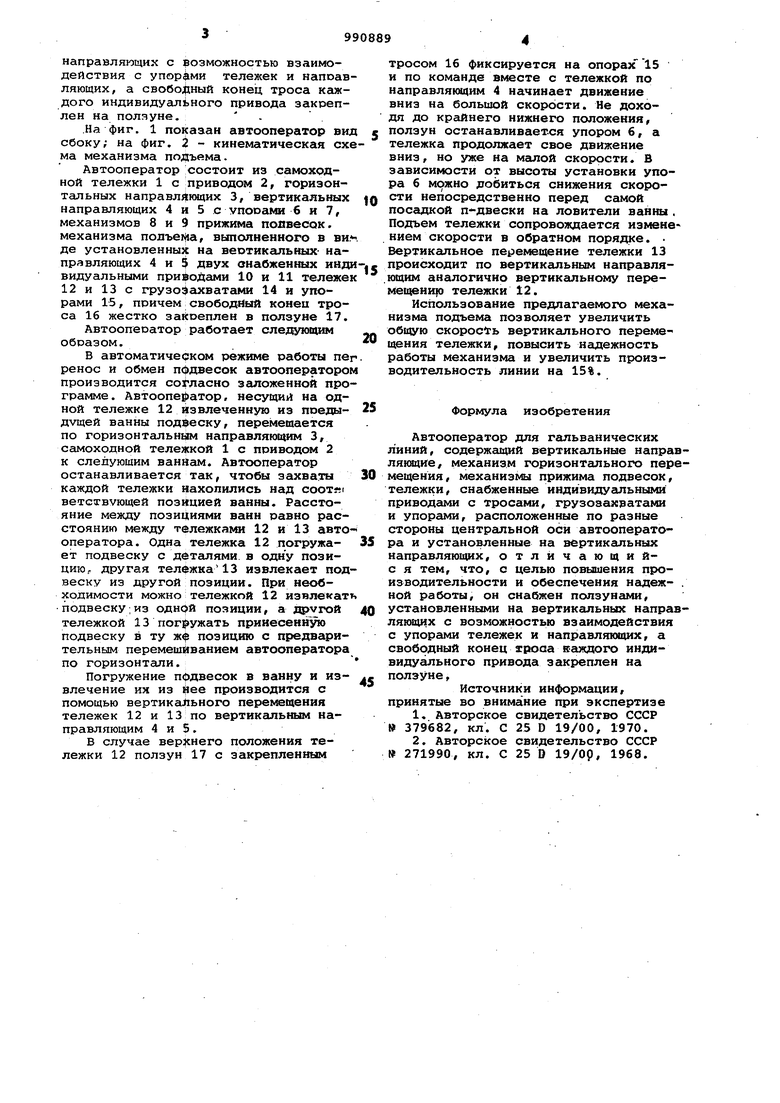
.На фиг. 1 показан автооператор вид сбоку; на фиг. 2 - кинематическая схема механизма подъема.
Автооператор состоит из самоходной тележки 1 с приводом 2, горизонтальных направляющих 3, вертикальных направляющих 4 и 5 с упооами б и 7, механизмов 8 и 9 прижима появесок. механизма полъежа, выполненного в ви. де установленных на веотикальных- направляющих 4 и $ двух снабженных инди видуальными приводами 10 и 11 тележек 12 и 13 с грузо ахватами 14 и упорами 15, причем свободный коней троса 16 жестко закоеплен в ползуне 17.
Автоопеоатор работает следующим образом.
В автоматическом режиме работы пегренос и обмен подвесок автооператором производится согласно заложенной программе. Автооператор, несущий на одной тележке 12 извлеченную из поедыдущей ванны подвеску, перемешается по горизонтальным направлякицим 3, самоходной тележкой 1 с приводом 2 к следующим ваннам. Автооператор останавливается так, чтобы захваты каждой тележки накопились над соотя ветствующей позицией ванны. Расстояние между позициями ванн равно расстоянию между тележками 12 и 13 автооператора. Одна тележка 12 погружает подвеску с детгшями в одну позицию , другая тележка13 извлекает подвеску из другой позиции. При необходимости можно тележкой 12 извлекать подвеску;из ОДНОЙ позиции, а другой тележкой 13 погружать принесенную подвеску в ту жф позицию с предварительным перемешиванием автооператора по горизонтали.
Погружение подвесок в ваннУ и извлечение их из йее производится с помощью вертикального перемещения тележек 12 и 13 по вертикальным направляющим 4 и 5.
В случае верхнего положения тележки 12 ползун 17 с закрепленным
тросом 16 фиксируется на опорах 15 и по команде вместе с тележкой по направляющим 4 начинает движение вниз на большой скорости. Не доходя до крайнего нижнего положения, ползун останавливается упором 6, а тележка продолжает свое движение вниз, но уже на малой скорости. В зависимости от высоты установки упора 6 можно добиться снижения скорости непосредственно перед самой посадкой п- двески на ловители ванны Подъем тележки сопровождается изменением скорости в обратном порядке. Вертикальное перемещение тележки 13 происходит по вертикальным направляющим аналогично вертикальному перемещению тележки 12.
Использование предлагаемого механизма подъема позволяет увеличить обиогю скорость вертикального перемещения тележки, повысить надежность работы механизма и увеличить производительность линии на 15%.
Формула изобретения
Автооператор для гальванических линий, содержащий вертикальные напраляняцие, механизм горизонтального пермещения, механизмы прижима подвесок, тележки, снабженные индивидугшьными приводами с тросами, грузозахватами и упорами, расположенные по разные стороны центргшьной оси автооператора и установленные на вертик шьных направляющих, отличающийс я тем, что, с целью повышения производительности и обеспечения нещежной работы, он снабжен ползунс1ми, установленными на вертикальных напраляющих с возможностью взаимодействия с упорами тележек и направляющих, а свободный конец хроаа каждого индивидуального привода закреплен на ползуне,
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 379682, кл. С 25 D 19/00, 1970.
2.Авторское свидетельство СССР 271990, кл. С 25 D 19/Ор, 1968.
ТТ ,1
S|/tJ.
5$
1
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | 1970 |
|
SU271990A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |
| Автооператор для гальванических и химических линий | 1981 |
|
SU981463A1 |
| Автооператор для гальванических линий | 1981 |
|
SU1004230A1 |
| Автооператор | 1985 |
|
SU1247435A1 |
| Автооператор для гальванических линий | 1983 |
|
SU1138369A1 |
| Автооператор для гальванических линий | 1980 |
|
SU952703A1 |
| Механизм подъема подвесок автооператора | 1980 |
|
SU1014997A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |


ХФи.2
