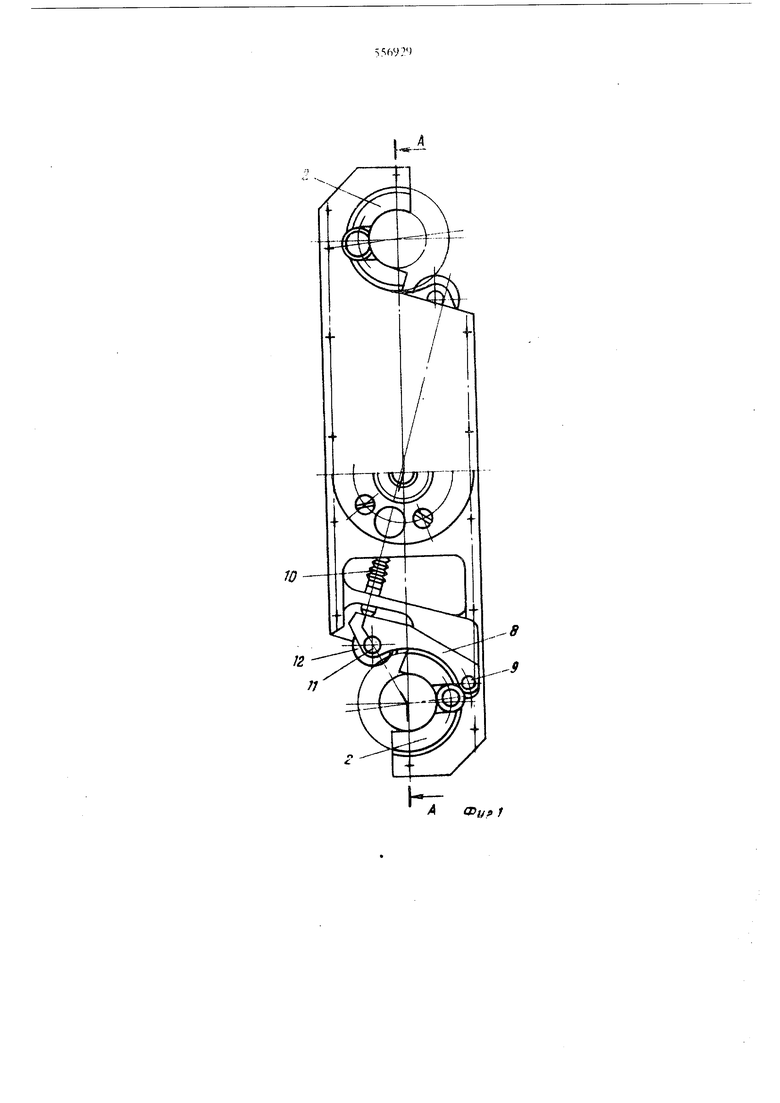
ленным на осях 9, пружинами 10. На свободном конце вилок 8 на осях 11 установлены свободно вращающиеся на своей оси ролики 12. В расточках стутшцы 3 расположены толкатели 13. Передняя часть толкателе;; имеет наклонную поверхность J4 и отверстие 15, а задняя - паз 16, боковые стороны которого параллельны оси вала 4. В зоне паза 16 в толкателях запрессованы пальцы 17. Толкатели 13 и взаимодействующие с ними стержни 7 расположрны в одной плоскости, проходящей через ось ишицевого вала 4. На втулке 18, установленной на шлицевой втулке 5, на осях 19 размещены рьиагн 20. Передняя часть рычагов 20 имеет захватную часть, а на противоположном конце их установлены легкие пружины 21, поджимающие рычаги 20 к пальцам 17, а при отсутствии их - к втулке 18.
В исходном положении руки (у торца шпиндельной бабки) передняя часть каждого рычага 20 располагается в направляющем отверстии толкателя 13, выполненном в ступице 3 и в его пазу 16. Пальцы 17 толкателей J3 размещаются в захватных частях рычагов 20. При этом направляющие отверстия толкателей замыкают рычаги 20, ограничивая возможность расцепления их с толкателями.
Предлагаемая механическая рука работает еледующим образом.
При поступлении команды из системы управления на смену инструмента включается привод поворота щлищевой втулки 5. Втулка 5 поворачивается совместно с втулксй 18 и установленными на ней рычагами 20. Одновременно посредством шлицев повсч)ачивается вал 4 со ступицей 3 и кфпусом. При этом ролики 12, взаимодействуя, с инструментами, установленными в шпинделе и магазине, поворачивают 8, Последние воздействуют на подпружяненные стержни 7, которые при перемещении проходят в отверстия 15 толкателей 13.
По (жончании поворота (после захвата инструментов) усилием пружрт 10 стержни 7 поворачивают вшпси 8 в обратном направлении, поджимая ролики 12 к захватным местам ннструментов. После раскрепления инструментов в шпинделе и гнезде магазина поступает команда из системы управления на вьгеод инструментов из шпинделя и магазина.
Это осуществляется гидроцилиндром поступательного перемещения руки, связанным с валом 4. Вал 4 с установленными на ней ступицей 3 к корпусом 1 с инструментами в захватах перемещается вперед, а толкатеяи 13 удерживаются от движения рычагами 20, так как повфот их для OCDOвождения толкателей снраничивают зат/шжающие поверхности в ступице 3. При перемещении кфпуса 1 вперед стержни 7 наезжают своими свободными торцами на наклонные поверхности 14 толкателей 13 и заклиниваются. Это исключает возмож1юсть перемещения стержней 7, а, следовательно, и поворота вилок 8 с роликами 12,запирающими
инструменты в захватах 2 корпуса 1. После заклинивания стержней 7 замыкающие поверхности ступицы 3 освобождают рьтги 20, которые при дальнейшем движении корпуса с инструментами вперед поворачиваются и освобождают толкатели 13. В дальнейшем толкатели 13 перемещаются вперед совместно с корпусом 1. После вывода инструмента из шпинделя и окончания поступательного перемещения вала 4 вперед подается команда на поворот шлицевсш втулки 5, а, следовательно, вала 4 с корпусом 1 и инструментами на 180.
При окончании поворота поступает команда на ввод нового инструмента в шпиндель. Вал 4 с установленными на ней элементамн осуществляет поступательное перемещение назад.
При подходе корпуса 1 к крайнему заднему положению пальцы 17 толкателей 13 отжимают рычаги 20, преодолевая усилие легких пружин 21, и заходят за их захватные части- В этот момент толкатели 13 упираются в торец втулки 18 и останавливаются, а корпус со ступицей 3 продолжает поступательное перемещение назад. При зтом стержни 7 съезжают с наклонной поверхности 14 толкателей 13 и в конце хода останавливаются против отверстий 15, а направляющие отверстия толкателей 13 наезжают на рычаги 20 и замьасают их. Новый инструмент установлен в шпиндель станка, а отр отавший - в магазин. После зажима инструментов г шпинделе и магазине следует команда на поворот корпуса 1 в исходное положение. При зтом ролики 12, взаимодействуя с захватными местами инструментов, поворачивают вилки 8, которые утапливают стержни 7 в отверстиях 15 толкателей 13, преодолевая усилия пружин 10. По окончании взаимодействия роликов 12 с инструментами, пружины 10 возвращают стержни 7 и вилки 8 в исходное положение.
Формула изобретения
Механическая рука для автоматической смены инструмента, содержащая корпус с захватами, установленный на валу, осуществляющем поступательные в осевом направлении и поворотНВю перемещения, и механизмы зажима инструментов в захватах, вьшолненные в виде подпружиненных стержней, заклиниваемых при зажиме перемещающимися толкателями, отличающаяся тем, что, с целью повышения надежности зажИма инструмента, механизмы зажима сшбжеиы установленными с возможностью совместного поворота с валом и неподвижными в осевом направлении подпружиненными рычагами, расположенными в пазу толкателей с закрепленными в его зоне пальцами, расцешшхшщмися с рьпагами 1фи заклиненном положении под пружинешшх стержней.
A фуг, /
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухзахватная механическая рука | 1977 |
|
SU659357A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Координатно-сверлильный станок | 1981 |
|
SU1000218A1 |
| Захват для автоматической смены инструментальных оправок | 1978 |
|
SU703300A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| Двухзахватная механическая рука | 1976 |
|
SU650781A2 |