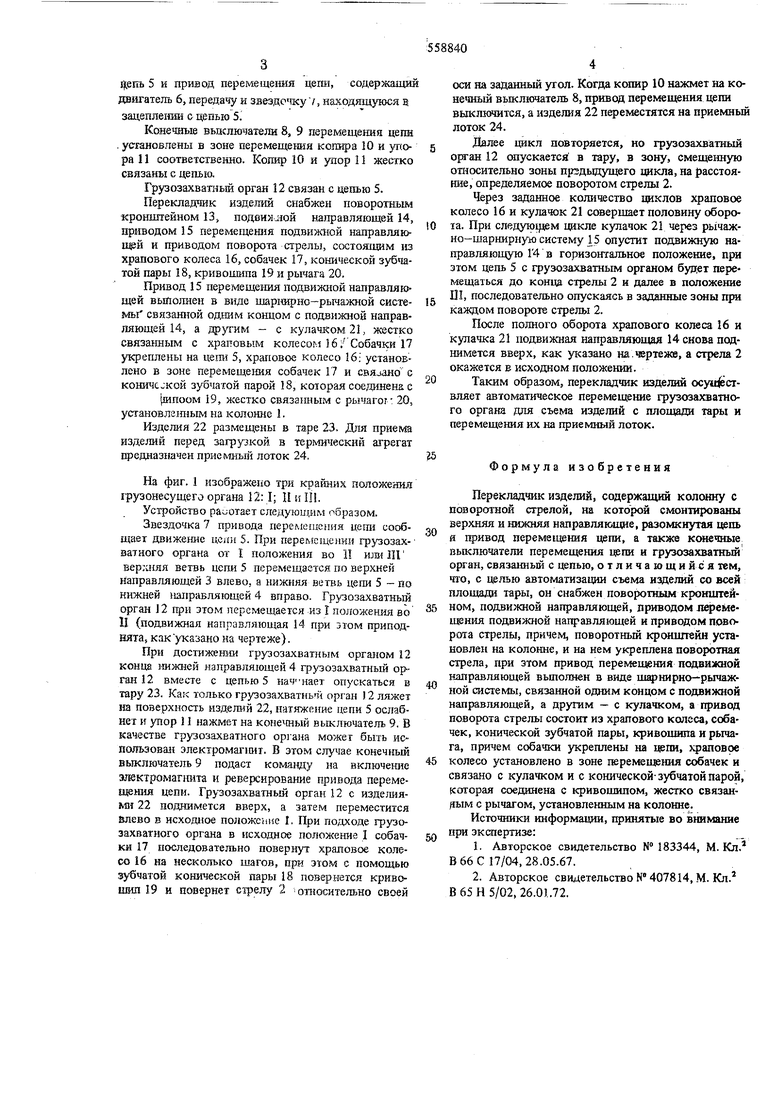
Изобретение относится к подъемно-транспортному машиностроению, к перекладчикам изделий и может быть использовано для перемещения изделий из тары, например, на приемный стоп термического агрегата. Известен перекладчик изделий, содержащий колонну с поворотной стрелой, связанной с грузозахватным органом . Недостатком устройства является отсутствие последовательного автоматического чередования технологических операций (поворот стрелы, подъем шш опускание груза, горизонтальное перемещение груза). Известен перекладчик изделий, содержащий колонну с поворотной стрелой, на которой смонтированы верхняя и нижняя направляющие, разомкнутая цепь и привод перемещения цепи, а также конечные выключатели перемещения цепи и грузозахватньвдфган, связанный с цепью 2), Известный перекладчик изделий позволяет автоматизировать процесс перегрузки изделий из тары, например, на щ)иемный стол термического в1регата. Недостатком известного устройства является то, что оно полностью не искточает ручной труд оператора, которьш при каждом ходе вниз грузезахватного органа направляет его на изделие, расположешгое на площади тары. Цель изобретения - автоматизация съема изделий со всей площади тары. Это достигается тем, что перекладчик изделий снабжен поворотным фонцлейном, подвижной направляющей, щжводом перемещгння подвижной направляющей и приводом поворота стрелы. Поворотный кронштейн установлен на колонне, и на нем укреплена поворотная стрела. Привод перемещения подвижной направляющей вьшолнен в .виде шарнирно-рьиажной системы, связанной одним концом с подвижной направляющей, а другим - с кулачком, а привод поворота стрелы состоит из храпового колеса, собачек, кон Геской зубчатой пары, кривошипа и рычага. Собачки укреплены на цепи, храповое колесо установлено в зоне перемецрния собачек и связано с кулачком н с конической зубчатой парой, которая соединена с кривошипом, жестко связанным с рычагом, установленным на коло1те. На фиг. 1 изображена кинематическая схема перекладчика изделий; на фиг. 2 - то же, разрез А-А на фиг. 1. Перекладшк изделий содержит колонну 1 с Ооворотной стрелой 2, на которой смонтированы верхняя 3 и нижняя 4 направляющие, разомкнута
|i,emi 5 и привод перемещеюш цепи, содержащий двигатель 6, передачу и звездочку/, находящуюся в зацеплешш о цепью 5.
Конечные вьпслючатели 8, 9 перемещения цепи . установлены в зоне пepeмeщe ffiя копира 10 и упора 11 соответственно. Копир 10 и упор 11 жестко связаны с цепью.
Грузозахватный орган 12 связан с цепью 5.
Перекладчик изде,11ий снабжен поворотным крошЕпейном 13, подаиилой направляющей 14, приводом 15 перемещения подвижной направляюи й и приводом поворота стрелы, ссютоящим из храпового колеса 16, собачек 17, конической зубчатой пары 18, кривошипа 19 и рычага 20,
Привод 15 перемещения подвижной направляющей выполнен в виде щарнирно-рычажной системы связанной одним с подвижной направляющей 14, а другим - с кулачком 21, жестко связанным с храповым колесом 16;Собачки 17 укреплены на цепи 5, храповое колесо 16; установлено в зоне перемещения собачек 17 и связано с коничс,;кой зубчатой парой 18, которая соединена с (шпоом 19, жестко связаьшым с рьгчагог: 20, установлггшым на колонне 1.
Изделия 22 размещены в таре 23, Для приема изделий перед загрузкой в термический агрегат предназначен приемный лоток 24.
На фиг. 1 изображено три крайних положения 1рузонесущего органа 12:1; И к П.
Устройство рае;отает следующим образом.
Звездочка 7 привода перемешения цепи сообщает движение цеян 5. При nepeivsemeHHM грузозахватного органа от I положения во 11 или III вер;с шя ветвь цепи 5 перемещается по верхней направляющей 3 влево, а нижняя ветвь цепи 5 - по нижней направляющей 4 вправо. Грузозахватный орган 12 при этом перемещается из I положения во И (подвижная направляющая 14 при этом приподнята, КПКуказано на чертеже).
При достиж1ешо1 грузозахватным органом 12 конца нижней направляющей 4 грузозахватный орган 12 вместе с цепью 5 опускаться в тару 23. Как только грузозахватньй орган 12 ляжет на поверхность изделий 22, натяжкние цепи 5 ослабнет и упор 11 нажмет на вьпслючатель 9. В качестве грузозахватного органа может бьггь испояьэован электромаптг, В этом конечный выключатель 9 подаст комавду на включегаю электромагш1та и реверсирование привода перемещенил цепи. Грузозахватный орган 12 с изделиями 22 поднимется вверх, а затем переместится йлево в исходное положение I, При подходе грузозахватного органа в исходное положение I собачки 17 последовательно повернут храповое колесо 16 на несколько шагов, при этом с помощью зубчатой конической пары 18 повернется кривоцкш 19 и повернет стрелу 2 опюсительно своей
оси на заданный угол. Когда копир 10 нажмет на конечный вьпслючатель 8, пртаод перемещения цепи выклинится, а изделия 22 переместятся на приемный лоток 24,
Далее цикл повторяется, но грузозахватный
орган 12 сшускается в тару, в зону, смещенную относительно зоны предыдущего дакла, на расстояние, определяемое поворотом стрелы 2,
Через заданное количество даклов храповое колесо 16 и кулачок 21 соверщает половину оборота. При следую1 лем кулачок 21 через рь1чажно-щарнирную систему опустит подвижную направляющую Г4 в горизонтальное положение, при этом цепь 5 с фузозахватным органом будет перемещаться до конца стрелы 2 и далее в положение Ш, последовательно опускаясь в заданные зоны при каждом повороте стрелы 2,
После полного оборота храпового колеса 16 и кулачка 21 подвижная направляющая 14 снова поднимется вверх, как указано на.чертеже, а стрела 2 окажется в исходном положении,
Таким образом, перекладчик изде;нш осуи ствляет автоматическое перемещение грузозахватного органа для съема изделий с площади тары и перемещения их на приемный лоток.
25
Формула изобретения
Перекладчик изделий, содержащий колонну с поворотной стрелой, на которой смонтированы верхняя и нижняя направляющие, разомкнутая цепь и привод перемендания цепи, а также конечные. выключатели перемещения цепи и грузозахватный орган, связанный с цепью, отличающийся тем, что, с црлью автоматизации съема изде.пий со всей площади тары, он снабжен поворотным кронштейном, подвижной направ.пяющей, приводом лфемеи ния подвижной направляющей и приводом поворота стрелы, причем, поворотный кронштейн установлен на колонне, и на нем укреплена поворотная стрела, при этом привод перемещения подвижной направ.гшющей вьтолнен в виде )нирно-рычажной системы, связанной одним концом с подвижной направляющей, а другим - с кулачком, а привод поворота стрелы состоит из храпового колеса, собачек, конической зубчатой пары, крнвощипа и рычага, причем собачки укреплены на цепи, фаповое
колесо установлено в зоне перелюцдания собачек н связано с кулачком и с конической- зубчатой парой, (соторая соединена с кривоашлом, жестко связан)1ым с рычагом, установленным на колонне.
Источники информации, принятые во внимание
1ФИ экспертизе:
1.Авторское свидетельство № 183344, М, Кл. В 66 С 17/04,28,05,67,
2,Авторское свидетельство №407814, М, Кл. В 65 Н 5/02, 26,0).,72,
Jd
19
ЛГ
ta.
гг
cp
24
| название | год | авторы | номер документа |
|---|---|---|---|
| Перекладчик изделий | 1990 |
|
SU1706945A1 |
| Устройство для перекладки изделий | 1977 |
|
SU650948A1 |
| Стреловой кран | 1973 |
|
SU443832A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| Делительная машина | 1958 |
|
SU118618A1 |
| Многооперационный станок для обработки щитовых деталей мебели | 1980 |
|
SU889430A1 |
| Грузозахватное устройство | 1990 |
|
SU1735195A1 |


С
Фиг1
Фи.г
