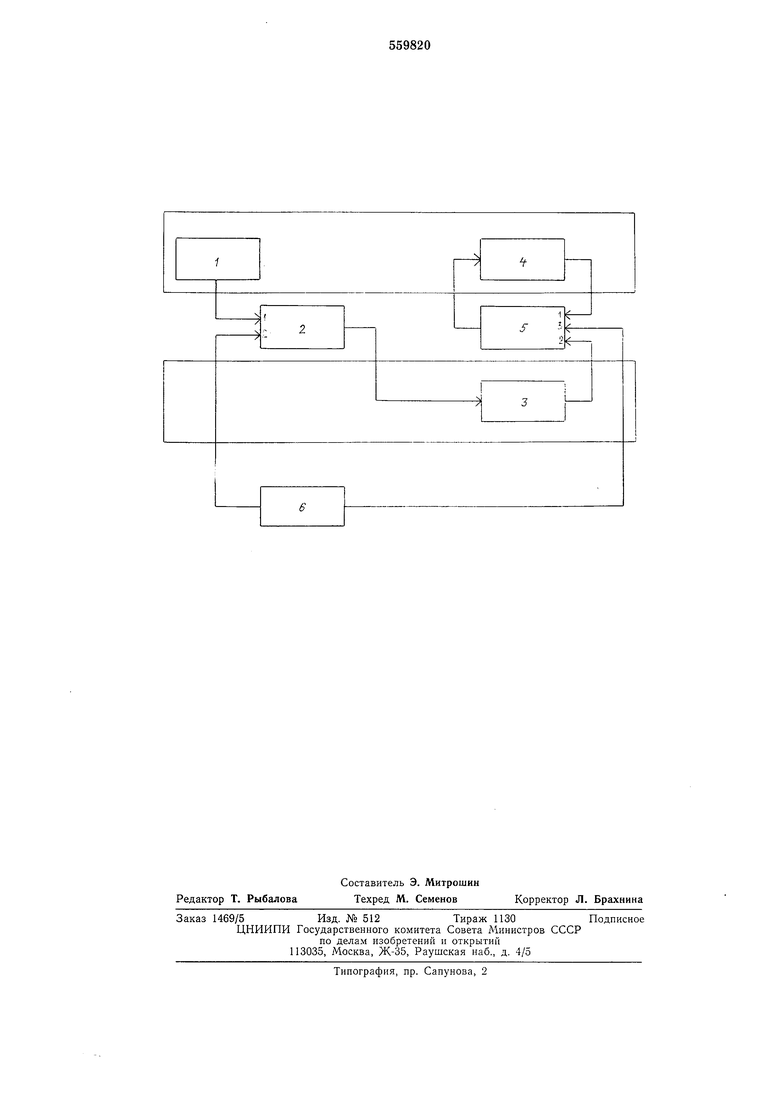
чика угла поворота задающего органа поступает на первый вход сумматора 2, с выхода которого подается на вход привода исполнительного органа 3, отрабатывающего входной сигнал. Сустав исполнительного органа новорачивается на тот же угол. При этом на выходе; но, нагрузке привода исполнительного органа 3 вырабатывается сигнал, пропорциональный нагрузке на исполнительном органе, поступающий на второй вход сумматора 5. Сигнал с выхода сумматора 5 подается на вход привода задающего органа 4, который отрабатывает этот сигнал и выдает с выхода по нагрузке на первый вход сумматора 5 сигнал, нронорциональный нагрузке на задающем органе.
Привод задающего органа 4 отрабатывает входной сигнал до тех пор, пока алгебраическая сумма сигналов на первом и втором выходах сумматора 5 не станет равной нулю. При этом онератор испытывает отралсенную нагрузку, пропорциональную нагрузке на исполнительном органе. При необходимости оператор поворачивает рукоятку задатчика 6 сигнала смещения. Сигнал с выхода по углу задатчика сигнала смещения 6 поступает на второй вход сумматора 2, с выхода которого подается на вход привода исполнительного органа 3 и отрабатывается последним. Сустав исполнительного органа рассогласовывается относительно сустава задающего органа на заданный угол, в результате чего рабочая зона исполнительного органа смещается относительно рабочей зоны задающего органа, и зона обслуживания манипулятора увеличивается. Сигнал с выхода по синусу угла задатчика 6 смещения подается на третий вход сумматора 5, алгебраически суммируется с сигналом с выхода по нагрузке привода исполнительного органа 3, содержащим информацию о моменте от веса подвижной части сустава исполнительного органа вместе с информацией о нагрузке на исполнительном органе. Так как зависимость момента от веса подвижной части сустава исполнительного органа является функцией синуса угла поворота сустава в вертикальной плоскости, то для сустава качания, ось которого горизонтальна, сигнал задатчика 6 сигнала смещения с выхода по синусу угла пропорционален моменту от веса подвижной части сустава исполнительного органа, поэтому привод задающего органа 4 не отрабатывает этот сигнал, и оператор воспринимает отраженную нагрузку без искажения, зависящего от нового положения исполнительного органа.
При использовании изобретения расширяется приблизительно вдвое зона обслуживания манипулятора без снижения точности его работы, а также улучшаются удобства работы и повыщается производительность труда оператора, благодаря сокращению в 1,5-2 раза энергетических и временных затрат на выполнение наиболее трудоемких операций в неудобной части рабочей зоны задающего органа.
Формула изобретения
Устройство для управления суставом очувствленного дистанционного копирующего манипулятора, содержащее датчик угла поворота задающего органа, подключенный к первому входу первого сумматора, привод задающего органа, вход которого нодключен к выходу второго сумматора, а выход по нагрузке подключен к первому входу второго сумматора, к второму входу которого подключен выход по нагрузке привода исполнительного органа, вход которого соединен с выходом первого сумматора, отличающееся тем, что, с целью расширения зоны обслуживания манипулятора при ограниченной рабочей зоне задающего органа, устройство содержит задатчик сигнала смещения, выход по углу поворота которого соединен с вторым входом первого сумматора, а выход по синусу угла
поворота соединен с третьим входом второго сумматора.
Источники информации, принятые во внимание при экспертизе:
1.Патент США № 3280991, кл. 214-1, 28.04.64.
2.Авт. св. № 398386, кл. В 251 11/00, 02.10.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Система управления суставом дистанционнного копирующего манипулятора | 1974 |
|
SU499108A1 |
| Устройство для управления суставомМАНипуляТОРА | 1979 |
|
SU802921A1 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU824130A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| Система управления копирующим манипулятором | 1976 |
|
SU574320A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |