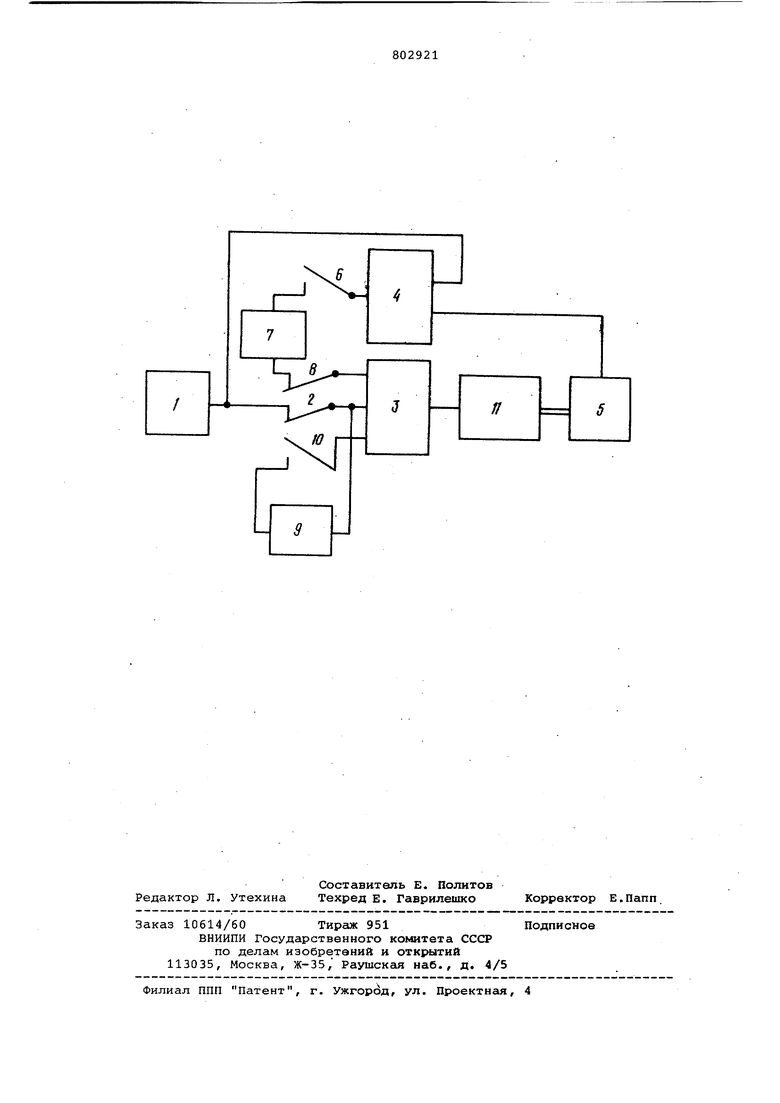
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СУСТАВОМ МАНИПУЛЯТОРА а привод 11 каждого сустава исполнительного органа отслеживает положение, задаваемое датчиком положения 5 соответствуквдего сустава задаю щего органа. При этом на второй элемент памяти 9 непрерывно поступает мгновенное значение выходного сигнала с датчика 1, соответствующее |углу поворота в данном суставе. В тех случаях, когда оператор должен производить операции при положениях задающего органа, которые ему неудоб ны, или которые выходят за пределы рабочей зоны оператора, о может сменить зону работы задгиоцего органа Для этого оператор с помощью устройства, управляющего ключг1 ш 2, 6, 8, 10, например переключателя, установленного на рукоятке задающего органа, должен одновременно замкнуть ключи 6 и 10 и разомкнуть ключи 8 и При этом на элементе памяти 9 запомнится значение сигнала, соответствующее положению исполнительного органа до переключения, и этот сигна через замкнувшийся ключ 10 поступит на сумматор 3, сигнал с которого определяет положение привода 11. Элемент памяти 7 будет отключен от входа сумматора 3 ключом 8 и подключен к выходу сумматора 4 ключом При этом положении задакндий орган можно переместить в любое удобное on ратору положение {т. -е, ключ 2 - ра зомкнут) в то время как исполнительный орган неподвижен. При этом на элемент памяти 7 поступает мгновенное значение сигнала, соответствующе разности угловых положений суставов задающего и исполнительного органов После установки задающего органа в удобное для оператора положение он одновременно переключает ключи 2, 8 6 и 10 в исходное положение. В этом случае на вход сумматора 3 через зам нутый ключ 2 поступает сигнал с дат чика 1, а на вход сумматора 3 через замкнутый ключ 8 с элемента памяти сигнал, соответствующий разности уг ловых положений суставов исполнительного и задакнцего органов, необходимый для удобной работы оператора. Таким образом, оператор может менять рабочую зону задающего органа, используя его в качестве задатчика необходимых углов рассогласования суставов задающего и исполнительного органов. Это позволяет улучшить эксплуатгщионные характеристики устройства и повышает его быстродейстФормула изобретения Устройство для управления суставом манипулятора, содержащее датчик положения задающего органа и последовательно соединенные первый сумматор, привод и датчик положения исполнительного органа, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит первый ключ и последовательно соединенные второй сумматор, второй ключ, первый элемент памяти и третий ключ, а также последовательно соединенные второй элемент памяти и четвертый ключ, выход которого подсоединен к первому входу первого сумматора, второй вход которого подсоединен к первому входу первого сумматора, второй вход которого соединен с выходом третьего ключа, а третий вход - со входом второго элемента памяти и через первый ключ - с выходом датчика положения задающего органа и первым входом второго сумматора, второй вход которого подключен к выходу датчика положения задакядего органа. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 398386, кл. В 25 11/10, 1970. 2.Авторское свидетельство СССР 499108, кл. В 25 9/00, 1974 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1565679A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1252163A1 |
| Устройство для управления манипулятором | 1981 |
|
SU960723A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |