(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОЧУВСТВЛЕННЫМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Устройство для управления схватом манипулятора | 1978 |
|
SU785842A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
1
Изобретение относится к манипуляторостроению и автоматике и может быть исполь зовано при создании высокоточных манипуляторов с широким диапазоном воспроизведения нагрузок.
Известен очувствленный манипулятор, содержащий пульт управления, последовательно соединенные датчик положения, привод исполнительного органа, первый датчик нагрузки, сумматор, привод задающего органа, второй датчик нагрузки, выход которого подключен к вычитающему входу сумматора 1 .
Наиболее близким к предлагаемому по технической сущности является устройство для управления очувствленным манипулятором, содержащее пульт управления, первый сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго датчиков положения, а вь1ход - со входом привода исполнительного органа, выход которого подключен ко входам первого датчика нагрузки и второго датчика положения, и второй сумматор, выход которого соединен со входом привода задающего органа, а первый вход - с выходом второго датчика нагрузки, вход которого подключен к выходу привода задающего органа 2.
Недостаток известных устройств состоит в относительно узком диапазоне очувствления, ограниченном по минимальному пределу
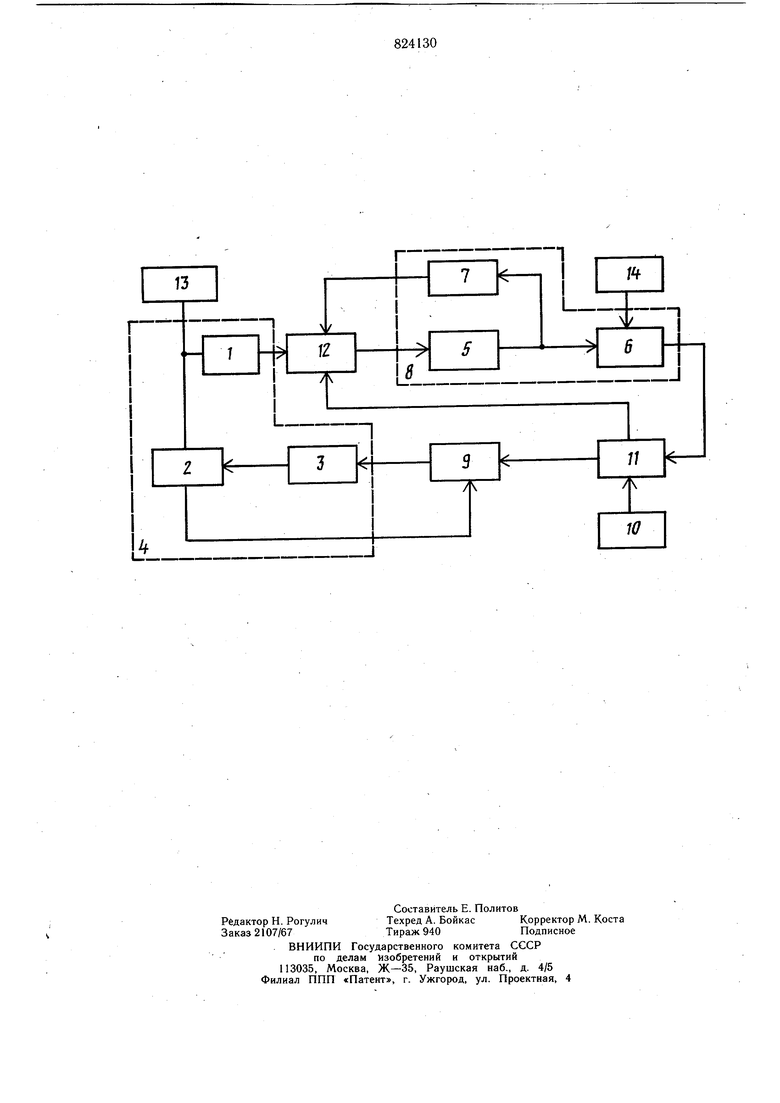
двумя основными факторами - физиологическими возможностями человека-оператора и трудностью обеспечения устойчивой работы замкнутой через оператора системы управления при больщих коэффициентах усиления разомкнутого контура. Если манипулятор предназначен для работы с 6oj7bщими нагрузками, нижний предел ощущаемых нагрузок определяется из нижнего предела в диапазоне оптимального ощущения оператора с учетом масштаба отражения нагрузки, полученного из заданной максимальной нагрузки на исполнительном органе, т. е. в конечном итоге определения диапазоном оптимального ощущения оператора, который, как показывает практика, находится в пределах 3 - 5. Так, например, при
заданной максимальной нагрузке манипулятора 100 кг нижний предел очувствления, при котором оператор еще надежно различает близкие по величине нагрузки, составляет 20-30 кг. При работе с меньшими нагрузками вероятность ошибочной оценки их величины увеличивается. При необходимости работа,ть с уменьшенными нагрузками изменяют конструктивные параметры системы управления и уменьшают грузоподъемность манипулятора. Кроме того, при работе с малыми нагрузками трудно обеспечить устойчивость работы манипулятора, так как уменьшение масштаба отражения нагрузки приводит к необходимости увеличения коэффициента усиления по каналу отражения для того, чтобы обеспечить соответствие максимальных нагрузок исполнительного и задаюшего органов. Цель изобретения - расширение функциональных возможностей устройства. Эта цель достигается тем, что оно содержит блок переключения коэффициентов, первый вход которого соединен с выходом пульта управления, второй вход - с выходом первого датчика нагрузки, а выходы - соответственно со вторым входом второго сумматора и третьим входом первого сумматора. На чертеже изображена функциональная схема устройства для управления очувствленным манипулятором. Она содержит первый датчик 1 положения, второй датчик 2 нагрузки, привод 3 задающего органа, задающий орган 4, привод 5 исполнительного органа, первый датчик 6 нагрузки, второй датчик 7 положения, исполнительный орган 8, второй сумматор 9, пульт 10 управления, блок 11 переключения коэффициентов, первый сумматор 12, оператора 13 и объект 14 манипулирования. Устройство работает следующим образом. Оператор 13, воздействуя на задающий орган 4, перемещает его в желаемом направлении. Первый датчик 1 положения вырабатывает сигнал, управляющий положением исполнительного органа 8 с помощью обратной связи, введенной через сумматор 12 от второго датчика 7 положения. Привод 5 исполнительного органа перемещает исполнительный орган 8 и, если объект 14 манипулирования воздействует на него, первый датчик 6 нагрузки вырабатывает сигнал, который через блок 11 переключения коэффициентов и сумматор 9 включает привод 3 задаюшего органа. Задающий орган 4 воздействует на руку оператора. Нагрузка, ощущаемая оператором 13, воспринимается вторым датчиком 2 нагрузки, являющимся датчиком обратной связи в канале отражения. Если оператор ощущает небольшую нагрузку или ее уменьшение, он подает сигнал с пульса 10 управления, который управляет блоком 11 переключения коэффициентов. В последнем устанавливается увеличенный коэффициент передачи по каналу нагрузки и привод 3 задающего органа отрабатывает увеличенную нагрузку на руке оператора 13. Таким образом, оператор переводит манипулятор в новый режим с масштабом отражения, обеспечивающим его работу в оптимальном диапазоне ощушений при уменьшенной нагрузке, т. е. диапазон очувствления расширяется. Однако возникающее при этом увеличение коэффициента усиления приводит к снижению запаса устойчивости системы и вызывает автоколебания манипулятора. Во избежание этого через блок 11 переключения коэффициентов и сумматор 12 в канал положения вводится связь по нагрузке таким образом, что при увеличении коэффициента передачи в канале нагрузки ошибка исполнительного органа по положению на выходе сумматора 12 увеличивается, что эквивалентно смягчению механической характеристики привода 5 исполнительного органа или снижению общего коэффициента усиления разомкнутой системы, вследствие чего запас устойчивости системы вновь восстанавливается, а расщирение диапазона очувствления происходит без ухудшения динамических свойств манипулятора. Предлагаемое устройство позволяет повысить эффективность применения очувствленного манипулятора и точность манипулирования. Увеличение функциональных возможностей устройства расширяет класс объектов манипулирования. Формула изобретения Устройство для управления очувствленным манипулятором, содержащее пульт управления, первый сумматор, первый и второй входы которого-соединены соответственно с выходами первого и второго датчиков положения, выход - со входом привода исполнительного органа, выход которого подключен ко входам первого датчика нагрузки и второго датчика положения, и второй сумматор, выход которого соединен со входом привода задающего органа, а первый вход - с выходом второго датчика нагрузки, вход которого подключен к выходу привода задающего органа, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит блок переключения коэффициентов. первый вход которого соединен с выходом пульта управления, второй вход - с выходом первого датчика нагрузки, а выходы - соответственно со вторым входом второго сумматора и третьим входом первого сумматора. Источники информации, принятые во внимание при экспертизе 1.Викторов В. В. и др. Теория и устройство манипуляторов. М., « Цаука, 1973, с. 123, рис. 2. 2.Кулешов В. С., Лакота Н. А. Динамика систем управления манипуляторами. М., «Энергия;, 1971, с. 244, рис. 5-14 (прототип).
