Формула изобретения
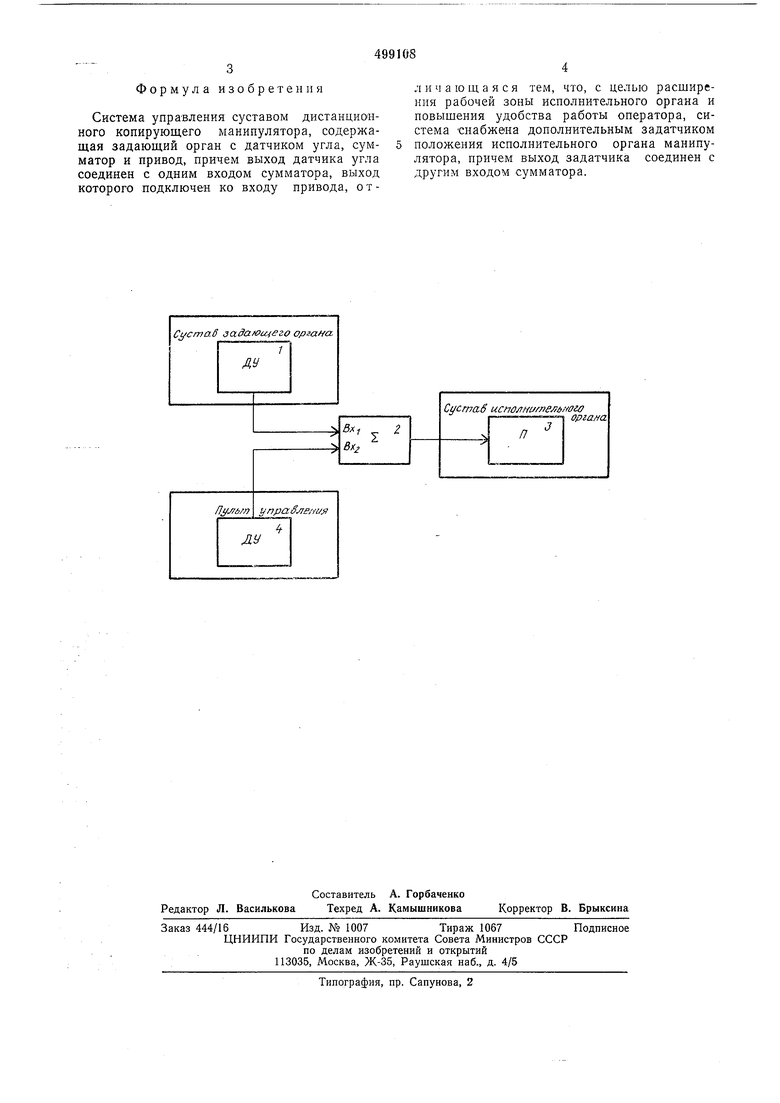
Система управления суставом дистанциоиного копирующего манипулятора, содержащая задающий орган с датчиком угла, сумматор и привод, причем выход датчика угла соединен с одним входом сумматора, выход которого подключен ко входу привода, отл и ч а ю щ а я с я тем, что, с целью расширения рабочей зоны исполнительного органа и повышения удобства работы оператора, система Снабжена дополнительным задатчиком положения исполнительного органа манипулятора, причем выход задатчика соединен с другим входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1166054A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1386445A1 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU824130A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
Сустав задаюи его органа
Сустав испоанителдмго
opiQffd
