Недостаток известного устройства состоит в сложном программировании работы автооператоров, обслул ивающих гальваническую линию. Сло кность программирования заключается в том, что для исключения столкновения автооператоров программа их работы составляется так, что код адреса первого автооператора всегда меньше кода адреса второго автооператора. Такое программирование требует наличия временных упреждений в циклограммах работы автооператоров и стартовых позиций па гальванических линиях, что понпл :ает производительность этих линий.
Цель изобретения - повыгиение производительности гальванических линий.
Это достигается тем, что устройство содержит блоки блокировок, блок формирования адресов, блок проверки кодов и блок допустимой разности адресов, выход которого соединен с вторым входом блока сравнения адресов, с первым входом блока формирования адресов и с первыми входами блоков блокировок, вторые и третьи входы которых связаны с выходами датчиков обратных связей, а выходы блоков блокировок соединены соответственно с третьими входами блоков связи и с вторым входом пзльта управлепия. Второй выход блока команд и третий выход блока сравнения адресов подключены соответственно к второму и третьему входам блока формирования адресов, выход которого соединен с первым входом блока проверки кодов, к второму входу которого подключен четвертый выход блока сравнения адресов, а выход блока проверки кодов - к другому входу коммутатора.
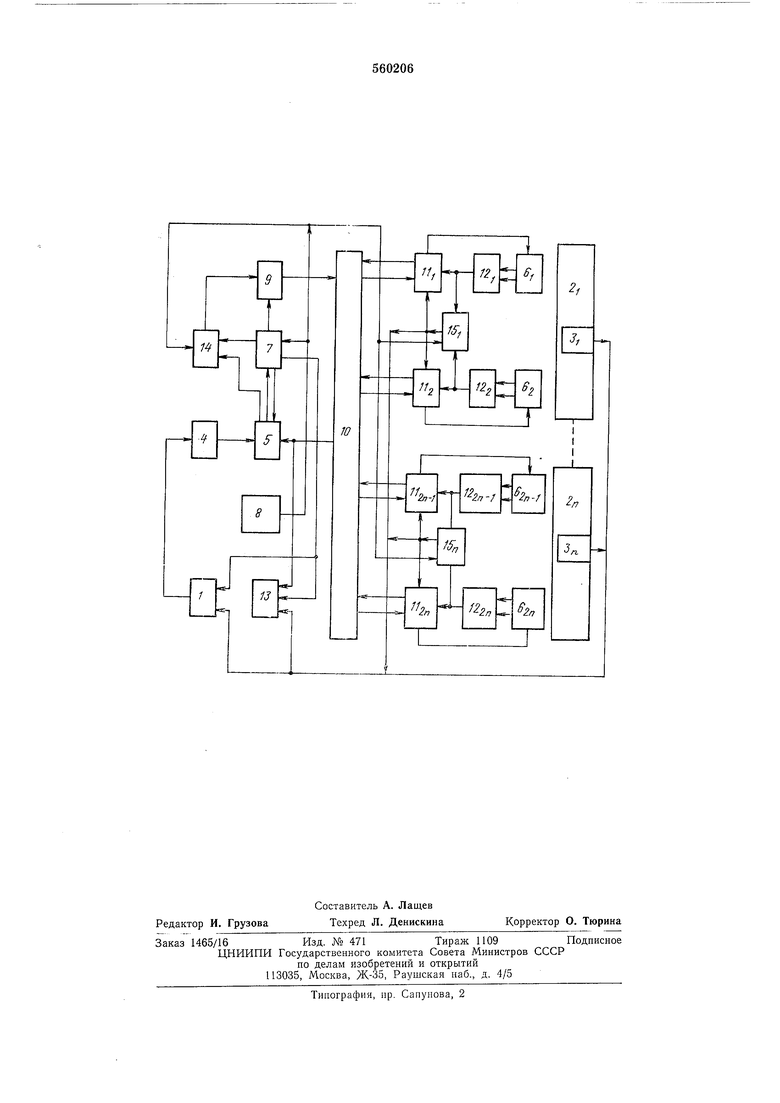
На чертел е представлена структурная схема устройства для управления автооператорами гальванических линий, где 1 - пульт управления; 2i-2„ - гальванические лннин; 3i-3„ - датчики состояния гальванических линий; 4 - блок регистрации и ввода; 5-блок команд; 6i-б2п - автооператоры; 7 - блок сравнения адресов; 8-блок допустимой разности адресов; 9 - блок проверки кодов; 10 - коммутатор; lli-Паи-блоки связи; 12i - 122П - датчики обратных связей; 13 - индикатор; 14 - блок формирования адресов; 15|-15п - .блоки блокировок.
Устройство работает следующим образом.
Неред пуском на пульт 1 управления подаются сведения с гальванических линий 2i-2п о номенклатуре (технологических программах) и количестве подвесок с деталями, а также сведения с датчиков 3i-3 состояния гальванических линий об исправности механизмов и аппаратуры по обслуживанию гальванических линий.
Эти сведения из пульта управления через блок 4 регистрации и ввода попадают в блок 5 команд, который составляет оптимальный график поступления деталей на обработку для каждой гальванической линии в отдельности. В случае выхода из строя какой-либо гальванической ванны линии, данные о работоспособности которых поступают с датчиков состояния, график их работы корректируется автоматически.
При пуске блок 5 вырабатывает исполнительные команды одновременно для двух (или более) автооператоров, обслуживающих одну гальваническую линию. Исполнительная команда несет информацию: код адреса автооператоров, номер ряда гальванической линии, признак перемещения подхватов автооператоров («за подвеской - в нижнем положении или «с подвеской - в верхнем положении), код времени нахождения автооператоров у адресуемой гальванической ванны лиНИИ. Эта команда из блока 5 проходит на первый вход блока 7, который сравнивает заданные коды адресов автооператоров на гальванической линии. Чтобы избежать столкновения автооператоров необходимо выполнение
условия
,
где yVi - адрес нечетного автооператора; NZ - адрес четного автооператора;
Д - допустимая разность адресов автооператоров (поступает из блока 8 допустимой разности адресов).
Если это условие выполнено, то коды адресов автооператоров из блока 5 команд через
блок 7 сравнения адресов попадают на второй вход блока 9 проверки кодов, где проходят аппаратный контроль (например, на четность или нечетность), и далее через коммутатор 10 на первые входы соответствующих
блоков связи (И). В блоках связи исполнительные команды запоминаются и реализуются. Реализация проводится в виде выдачи в определенной последовательности команд на включение привода механизмов автооператоров: выбор направления перемещения автооператоров вдоль гальванической линии и остановка его в центре адресуемой позиции (ванны); перемещение подхватов в 1-й или во 2-й ряд гальванической линии, перемещение
подхватов автооператоров в крайнее верхнее (крайнее нижнее) положение; включение выдержки времени; включение (выключение) приводов механизмов управления внутриванной автоматики (крыщки, качание и т. д.).Информация о реализации той или иной команды подается на второй вход блока связи (11) с датчика обратной связи (12), механически связанного с автооператором, и после полной реализации исполнительной команды из блока связи через коммутатор 10 на первые входы блока 5 команд и индикатора 13 поступает сигнал готовности блока связи к приему очередной исполнительной команды.
Если условие безаварийной работы автооператоров на гальванической линии не выполнено, т. е. NZ-Л/1 Д, то из блока 7 сравнения адресов на третьи входы блока 14 формирования адресов и блока 5 команд поступает предупреждающий сигнал. Но этому сигналу в блоке команд анализируется состояние каждого из автооператоров, обслз живающих соответствующую гальваническую линию, а именно: адреса автооператоров и положение их подхватов, время выдержки, время выполнения исполнительной команды и т. д. После анализа блок 5 выдает команду на приоритет в работе одному из автооператоров. Эта команда поступает на второй вход блока 14 формирования адресов, который в зависимости от кода адреса автооператора, получившего приоритет в работе, вырабатывает для другого автооператора такой код адреса, который бы обеспечил выполнение условия нестолкновения автооператоров. Новый код адреса автооператора через блок 9 проверки кодов и коммутатор 10 попадает в блок связи и автооператор «отгоняется на позицию гальванической линии, адрес которой удовлетворяет условию безаварийной работы обоих автооператоров на гальванической линии. Одвременно получает команду на перемещение и автооператор, получивший приоритет в работе. После отработки исполнительной команды автооператором, получившим приоритет, начинает работать другой автооператор, перемещающийся в адрес, который ранее поступал из блока 5 команд.
В устройстве предусмотрено аварийное отключение приводов перемещения автооператоров вдоль гальванической линии при возникновении угрозы столкновения автооператоров (особенно при ручном управлении автооператорами). Отключение осуществляет блок блокировок (15), работающий как и блок 7 сравнения адресов, но в нем сравниваются не программируемые коды адресов автооператоров, поступающие из блока команд, а истинные адреса автооператоров гальванической линии, которые подаются с датчиков обратных связей. Таким образом, блок блокировок непрерывно сравнивает истинные адреса автооператоров гальванической линии на соответствие условию безаварийной работы автооператоров. Если не выполнено условие (), то сигнал «авария из блока блокировок поступает на третьи входы блока связи, которые вырабатывают команды, запрещающие перемещение автооператоров навстречу друг другу. Кроме того, сигнал «авария проходит соответственно на второй и третий входы пульта 1 управления и индикатора 13.
Так как время работы автооператоров по выполнению исполнительной команды велико по сравнению с быстродействием самого устройства, то в устройстве предусмотрен циклический опрос состояний автооператоров гальванических линий.
Следовательно, устройство может управяять работой 2л автооператоров п гальвани«еских линий.
Упрощение программирования работы автооператоров на гальванических линиях позволит повысить производительность гальванических линий, по сравнению с существующей, на 25%.
Ф-о рмула изобретения
Устройство для управления автооператорами гальванических линий, содержащее коммутатор, одни входы и выходы которого соединены соответственно с первыми выходами и входами блоков связи, вторые выходы которых подключеиы соответственно к входам
автооператоров, с которыми механически соединены соответственно датчики обратных связей, выходы которых подключены соответственно к вторым входам блоков связи, другой выход коммутатора соединен с первыми входами индикатора и блока команд, к второму входу которого через блок регистрации и ввода подключен выход пульта управления, а третий вход и иервый выход блока команд соединены соответственно с первыми выходом и входом блока сравнения адресов, второй выход которого подключен к первому входу пульта управления и к второму входу индикатора, и датчики состояния гальванических линий, выходы которых соединены с вторым входом пульта управления и третьим входом индикатора, отличающееся тем, что, с целью иовышения производительности гальванических линий, оно содержит блоки блокировок, блок формирования адресов,
блок проверки кодов и блок допустимой разности адресов, выход которого соедииен с вторым входом блока сравнения адресов, с первым входом блока формирования адресов и с первыми входами блоков блокировок, вторые и третьи входы которых подключены соответственно к выходам датчиков обратных связей, а выходы блоков блокировок соединены соответственно с третьими входами блоков связи и с вторым входом пульта управления, второй выход блока команд и третий выход блока сравнения адресов подключены соответственно к второму и третьему входам блока формирования адресов, выход которого соединен с первым входом блока нроверки
кодов, к второму входу которого подключен четвертый выход блока сравнения адресов, а выход блока проверки кодов соединен с другим входом коммутатора.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 407978, кл. С 23Ь 5/68, 02.07.71.
2.Сб. «Технология машиностроения, вып. П, Тула, 1971, с. 128-134.
3. Авторское свидетельство СССР Л 410131, кл. С 23Ь 5/68, 09.11.71.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| УСТРОЙСТВО ПОКАЧИВАНИЯ ШТАНГ АВТООПЕРАТОРОМ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 1991 |
|
RU2008371C1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| КОМПЛЕКТНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406623C1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |