1
Изобретение относится к куанечно-прессовому машиностроению и предназначено для многопозиционных прессов, у которых усилие и величина хода выталкивателей на каждой, позиции неодинаковы и не являются постоянными дпя различных видов штампуемых деталей.
Известны выталкиватели многопозиционных прессов, содержащие гидравлические цилиндры, передающие усилие на толкатели, и механизм регулирования положения толкате- лей 1.
Однако больщие габариты выталкивателей не позволяют эффектно использовать их в многопозииионном универсальном прессе, где величина усилия на каждой позиции может меняться в щироких пределах в зависимости от типа и размеров щтампуемых деталей, а рабочее давление в гидросистеме и диаметры цилиндров для каждой позиции выбираются по максимальным вел гчинам усилий выталкивания, возможным для каждой из позиций.
В предпагаемом прессе эти недостатки устранены за счет того, что поршни цилиндров выполнены с двумя щтоками, верхние на которых соединены с толкателями, а нижние снабжены рычагами, жестко установленными на общей оси и соединенными с ними через серьги. Механизм регулирования положения каждого толкателя выполнен в виде конической зубчатой передачи, одно из зубчатых ко лес которой установлено на регулировочном валу, смонтированном на станине, а другое шлицевым зацеплением связано с толкателем, при этом толкатель соединен с верхними щтоками цилиндра резьбовым соединением.
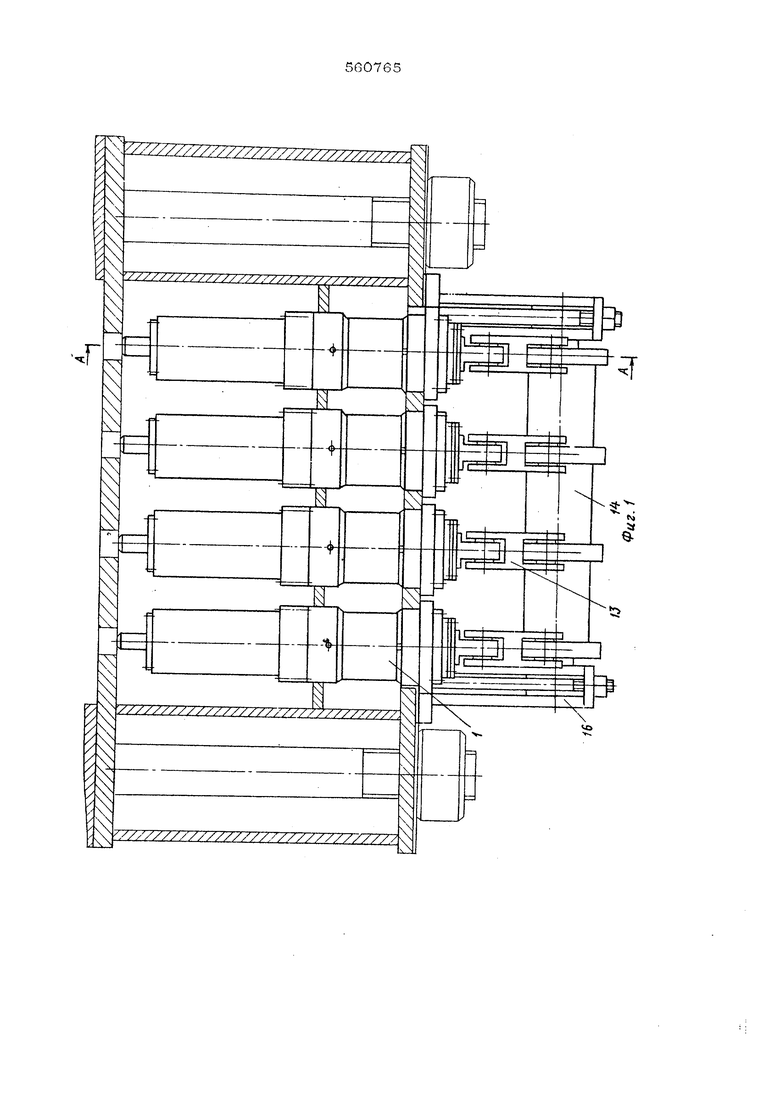
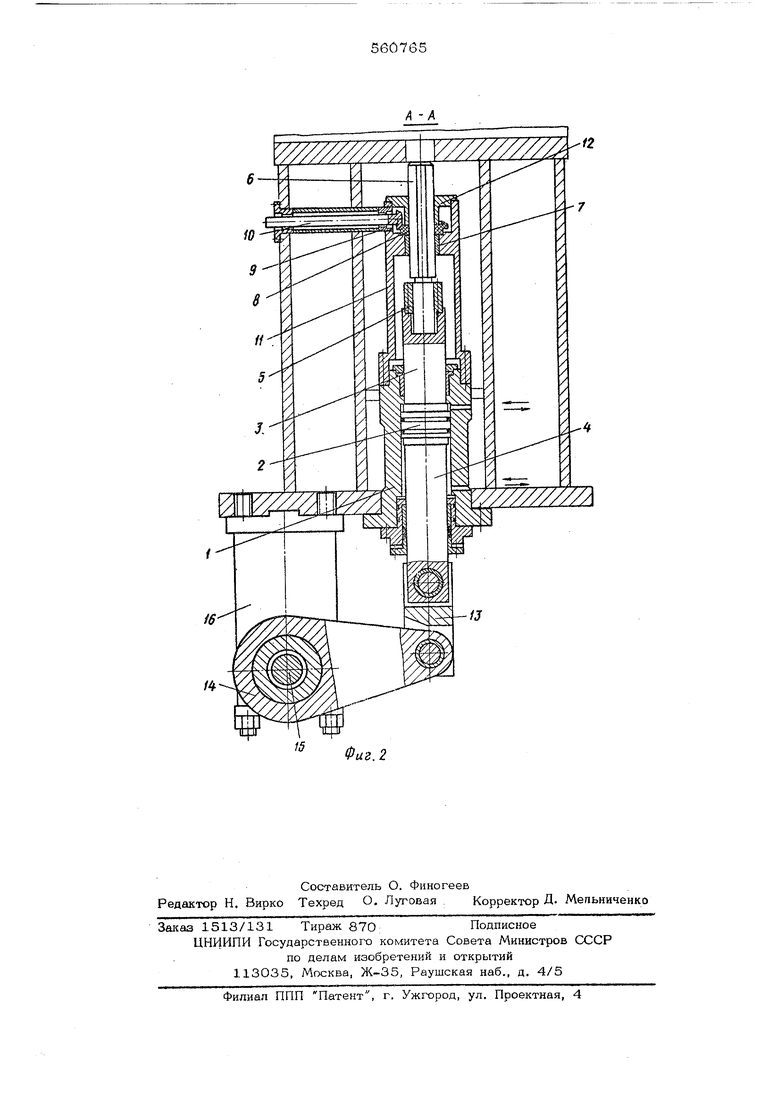
На фиг. 1 показан выталкиватель, общий вид; на фиг. 2 - разрез А-А фиг. 1.
Выталкиватель содержит гидравлические цилиндры 1, в которых размещены порщни 2, каждый из которых имеет два щтока: верхний 3 и нижний 4. В верхних щтоках 3 образованы выемки, Б которых неподвижно закреплены гайки 5. В гайки 5 ввернуты токатели 6, имеющие резьбу на нижнем конце и шлиц на цилиндрической части. Толкатели 6 имеют возможность осевого перемещения ь направляющих втулках 7, в шлицах
конических зубчатых колес 8. Последние зацеплены с шестернями 9, закрeimэнными на регулировочных валах 10. Корпусы 11 упоры 12 фиксируют зубчатые конические колеса 8 от перемещения в осевом направлении. Нижние штоки 4 гидравлических цилиндров с помощью серьги; 13 соединены с многоплечим рычагом 14, жестко установленным «а оси 15, которая жестко закреплена на опора:; 16 в станине пресса. Для совершения рабочего хода жидкость от системы высокого давления (на чертежах не показана) подается в полости под поршнями 2, а лолости над поршнями при этом соединяются со сливом. Под давлением жидкости поршниJ2 со штoкa ж 3 и 4 перемешаются вверх одновременно, поскольку все нижние штокЕг 4 связаны с одним и тем же рычагом 14. Также одновременно перемеща ются и TonKaTea б,, осуществляющее вытал кивание деталей из штампов. Усилие выталкивания на одной (или нескольких) позиции при этом может быть больше максимального усилия, развиваемого одним (или ,нескол кими) отдельно взятым гидроципиндром 1, на ту же величину, на которую усилие сопротивления выталкиваемых деталей на отдельных позициях меньше максимального усилия, которое могут развивать гидроцилиндры этих позиций. Этот эффект перераспределения усилий обеспечивается гкесткой связью нижних щтоков 4 через серьги 13 с рычагом 14. По окончании процесса выталкивания переключением в гидросистеме лодпоршне:-,ые полости гидроцилиндров 1 соединяются со сливом, а Б надпоршневые подается жидкост под высоким давлением. При этом поршни 2 со штоками 3 и 4 и тошсателями 6, а также все другие подвижные элементы выталкивателя возвращаются в исходное подожение.
. Регулирование исходногчз положения любого толкателя 6 осуществляется отдельно на каждой позиции . вращением регулировочного вала 10. При этом коническая шестерня 9 вращает зубчатое коническое колесо 8, которое.взаимодействует через шлицевое соединение с цилиндрической частью толкателя 6, ввертывая или вывертывая его из гайки 5. Формула изобретения 1.Гидромеханический выталкиватель многопозиционного пресса, содержащий по крайней мере два гтщравлических цилиндра, передающих усилие на толкатели и механизм регулирования положения толкателей, отличающийся тем, что, с целью обеспечения необходимого технологического усилия выталкивания на каждой позиции, поршjffl цилиндров выполненыС двумя штоками, верхние из которых соединены с толкателями, а нижние - снабжены рычагами, жестко установленными на обшей оси и соединенными со штоками через серьги. 2.Выталкиватель по п. 1, отличающий с я тем, что, с целью раздельного для каждой позиции регулирования исходного положения толкателей, механизм регулирования положения каждого толкателя выполнен в виде конической зубчатой передачи, одно из зубчатых колес которой установлено на регулировочном валу, смонтированном на станине, а другое посредством шлицевого соединения связано с толкателем, при этом толкатель соединен с верхним штоком цилиндра резьбовым соединением. Источники информации, принятые ао внимание |При экспертизе: 1. Игнатов А, А. и Игнатова Т, А. Кривошипные горячештамповочные прессы, Машиностроение, М., 1974, стр. 75, рис. 49.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для изготовления кольцевых брикетов из порошкообразных материалов | 1983 |
|
SU1123885A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ЗАГОТОВОК в РАБОЧУЮ ЗОНУ МНОГОПОЗИЦИОННОГО ПРЕССА | 1972 |
|
SU343876A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство для привода подающей линейки для многопозиционного пресса | 1986 |
|
SU1741603A3 |
| Многопозиционный пресс для горячей объемной штамповки | 1985 |
|
SU1279716A1 |
| Выталкиватель пресса | 1985 |
|
SU1268436A1 |
| Машина для изготовления кольцевых брикетов из порошкообразных материалов | 1984 |
|
SU1193012A2 |
| Вертикальный механический пресс | 1987 |
|
SU1497053A1 |
| Механизм нижнего выталкивателя пресса | 1981 |
|
SU958139A1 |
/ / / / /
.г
tel
-Т
fel
--v
////
0
у
y////////// V//////77/ZA
15
f2
-7
Фиг. 2
