Изобретение относится к облает ; иодъемно-транспо,ртного ма Ш11ност,роения и предназначено для погрузки на подвесной конвейер штучных издел}1Й с выступами, ;;апрммер алюминиевы.х фляг.
Известно устройство, содержащее стан:.ку, на которой оюнтлрована поворотная рама с пазами. По раме движется каретка с жесткими упоралш для груза. Поворотная рама приводится в действие подъемно-опускным механизмом, выполненным в виде гидродомкратов и кривошипного вала, смантирова.нного в подш.ип.ннковых опорах 1.
Такое устройство «е позволяет перегружать изделия с вьиступамл, :например фляги, и ориентировать одновременно несколько изделий.
Известно также уст;ройство для штучных изделий на подвесной конвейер, вкл1очаюп1ее подъемный стол с направляюШНми ,н рамой, сблокирова;нный с подвесным конвейером, и захваты в виде обхватызаюидей изделие скобы с горизонтальн.ым;.) лапами :2.
Целью изобретения является обеспечение возможности ориентирова1ния «ескольк х )здел.ий с выступами в поперечном направленил относительно лап захвата.
Это достигается тем, что устройство снабжено закреплен.ным1И на ра.ме подъем;г:ого
стола копирНымн стоиками, поворотным рычагом, осью и ста}10вленным|И на оси поворотными в вертикальной плоскости фиксаторами, рычагамн с нажимными роликами, взаИМОДСЙСТВ}1ОЩИМИ с КОПИрНЫМН стойками, 1
водилом, связанным с поворотным рычагом.
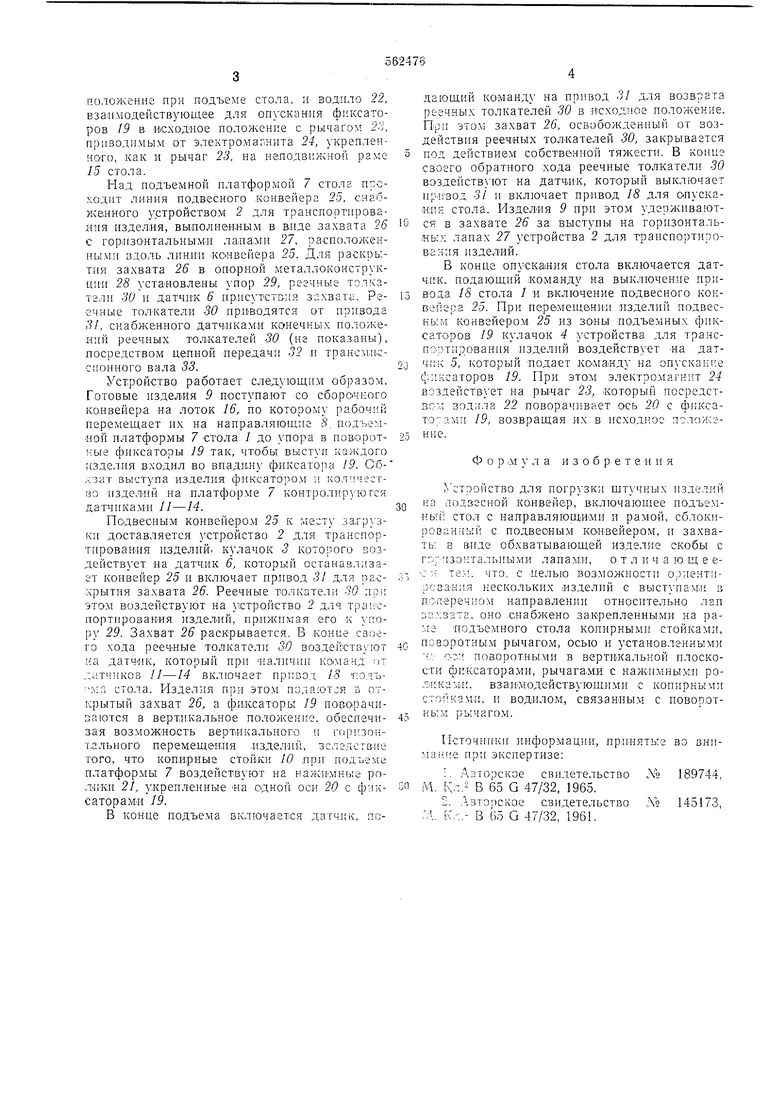
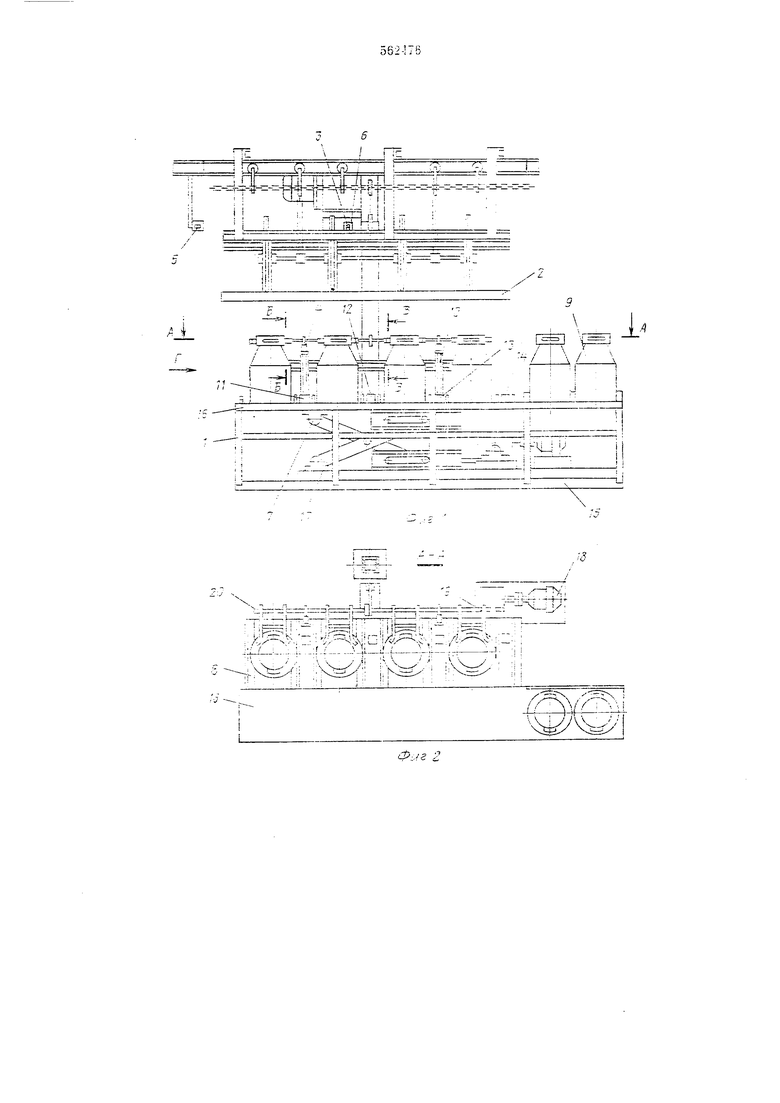
На фиг. 1 изображено предложенное устройство, общий вид; на фиг. 2 дан разрез А-Л на фнг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - вид по стрелке Г на фпг. 1.
Устройство вкл очает подъемный стол / и устройство 2 для транспортирования изделия с кулачкам:И 3 и , воздействующими на датчики 5 и 6. Подъемный стол / состоит iis подъемной платформы 7 с направляюшнми 8 для излетий 9, конирными стойками 10 и датчикам присутствия //-14, а также иеподвижной рамы 5, лотка 16, механизма подъема /7 и привода 18 с датчикам) крайних положен Й стола (не показа.ны).
Для ор1 ентации одновременно нескольк 1х Здел1 Й ад подъемиой платформой 7 расположены поворотные в вертикальной плоскости фиксаторы 19. укрепленные посредством njnoHOK на поворотной оси 20, смонти|рованной неподв жной ра.ме 15 стола /. На о-с-п 20 укреплены также ролнк | 21,
BЗaИ OДeЙCTBy OЩ e с СТОЙКаМ 10
для поворота (1 ксаторов 19 в
положение при подъеме стола, и водило 22, вза.имодействующее для спускан«я ф1 ксаторов 19 в исходное положение с рычагом 23, приводимым от электромаг.нита 24, укреплепкого, как и рычаг 23, на неподвижной раме 15 стола.
Над подъемной платформой 7 стола преходит ли.н-ия подвесного конвейера 25, снабженного устройством 2 для транспортирования изделия, выполнеьшым в в,иде захвата 26 с гор|Изо«тальныМП ла,палш 27, расположенным.и вдоль линии конвейера 25. Для раскрктня захвата 26 в опорной металлоконструкции 28 установлены упор 29, реечные толкатели 30 и датчик 6 присутств.ия захвата. Реечные тол:катели 30 приводятся от привода 31, снабженного датчиками конечных положений рееч.ных толкателей 30 (не показаны), посредством цепной передачи 32 л трансмисС110ННОГО вала 33.
Устройство работает следующим образом. Готовые издел-ия 9 поступают со сборочного конвейера на лоток 16, по которому рабочий перемещает пх на направляющие 8, подъемной платформы 7 стола / до упора в поворотные фиксатО|ры 19 так, чтобы выступ каждого изделия входил во впадилу фтгксатора /9. Обхзат выступа изделия фиксатором и колпчест30 нзделий иа пл.атформе 7 контролирую гея датчиками //-14.
Подвесным конвейером 25 к месту загрхзкн доставляется устройство 2 для транспорт ровання изделий, кулачок 3 которого воздействует на датч:ИК 6, который останавливает конвейер 25 и включает привод 31 для раскрытия захвата 26. Реечные толкатели 30 л;)к этом воздействуют на 1стро.йство 2 для траь спортпроваНИя издел ий, прижимая его к vnoру 29. Захват 26 раскрывается. В .коние своего хода реечиые толкатели 30 воздействуют на датЧИК, который при наличии колганд датчиков включает приво; 18 подъМл стола. Издел; я при этом подают.:я в открытый захват 26, а фи.к,саторь: 19 поворачиваются в вертикальное положение, обеспечивая возможность вертикального и горизонтального перемещения .изделий, зслелсгвие того, что копирпые стойки 10 лри подъеме платформы 7 воздействуют на нал-си-мные рлоли-ки 21, укрепленные иа одной оси 20 с фиксаторами 19.
В конце подъема включается датчик, подающий команду на привод 31 для возврата реечных толкателей 30 в исходное иоложенне. При этом захват 26, освобожденный от воздействия реечных толкателей 30, закрывается иод действием собственной тяжести. В конце своего обратного хода реечные толкатели 30 воздействуют на датчик, который выключает пр.-:вод 31 н включает привод 18 для опускания стола. Изделия 9 при этом удерживаются в захвате 26 за выступы на горизонталь/нь:х лапах 27 устройства 2 для транспортирования изделий,
В конце опускания стола включается датч гк, подающий команду на выключение привода 18 стола 1 и включение подвесного конвейера 25. При перемещении изделий подвесным конвейером 25 из зоны иодъемных фиксаторов 19 кулачок 4 устройства для транспс ;)тировання изделий воздействует на датчане 5, который иодает .кОМалду на опускание фиксаторов 19. При этом электромагнит 24 воздействует на рычаг 23, который посредством водила 22 поворам11вает ось 20 с фиксато;: ами 19, возвращая их в исходное положение.
Фор ,м у л а изобретения
стоойство для погрузки штучных изделий на подвесной конвейер, включающее подъемныГ; стол с направляюидамп и рамой, сблокированный с подвесным конвейером, и захвать: в виде обхватывающей изделие скобы с roi;: изоггальны.ми лапами, отличающеес :.{ те;.;, что, с иелью возможности озиентирсвЛНия нескольких изделий с выступами в поч1еречно иаправленин относительно лап захвата, оно снабжено закрепленными на раме Подъемного стола копирными стойками, поворотным рычагом, осью и установленными v v:.-. поворотными в вертикальной плоскости фиксаторами, рычагалга с нажимными роЛ4;кам:, взаимодействующими с копирными стпГками. I водилом, связанным с поворотным рычагом.
Источники информации, принятые во внимание при экспертизе:
:. Авторское свидетельство 189744. М. Кл.2 В 65 G 47/32, 1965.
2. Авторское свидетельство JV 145173, М- К/:.- В 65 G 47/32, 1961.
I ; I-Lj- Ш M hilj Ui
---;H; i F - 11Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для упаковывания в ящик штучных изделий | 1979 |
|
SU956355A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для сортирования сухого лущеного шпона | 1988 |
|
SU1579781A1 |
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Способ укладки штучных изделий в пакет и транспортная линия для его осуществления | 1978 |
|
SU887387A1 |
| Манипулятор для погрузки и разгрузки изделий с подвесного конвейера | 1983 |
|
SU1161440A1 |
| Устройство для разгрузки и погрузки крупногабаритных изделий | 1975 |
|
SU578243A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для кантования изделий | 1990 |
|
SU1724552A1 |
и K Л
Ф--г 2 .
. J
Ъ-Ъ
Bi-id Г
5
