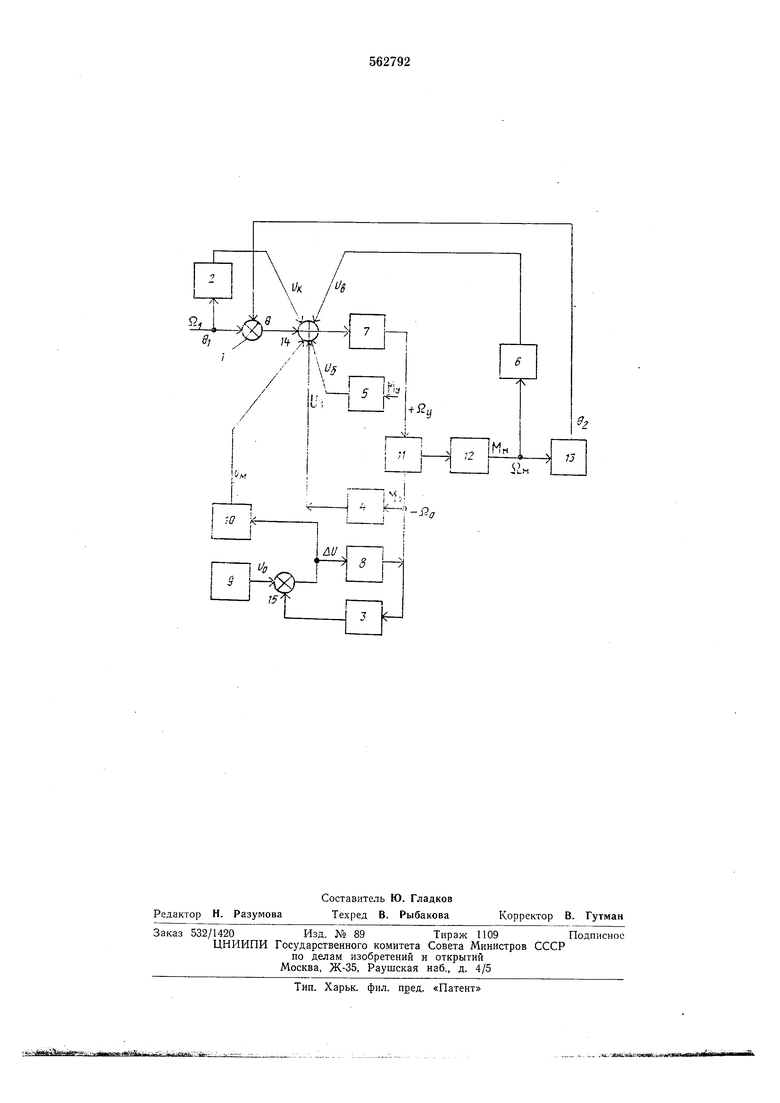
элемент 13, первый 14 и второй 15 сумматоры, Эь 62, 6 - соответственно входной сигнал, выходной сигнал, ошибка привода; Qj, Sy, So, 2„ - скорости соответственно задаваемая, управляемого канала, опорного канала, нагрузки; U - входной сигнал опорного канала; - ошибка опорного канала; UK, НА, iff,, и в, и а - соответствующие корректируюш.ие сигналы; My, MQ, УИ„ - моменты, действующие на валах соответственно управляемого канала, опорНого канала и нагрузки.
Предлагаемый привод .работает следующим образом.
Пр,и отсутствии входного сигнала 0 за счет сигнала /, источника 9 двигатель опорного канала 8 вращается с постоянной опорной скоростью QO- Для повышения качественных показателей опорного канала 8 оч охвачен обратной отрицательной связью за счет второго измерителя скорости 3 и сумматора 15. На выходе сумматора 15 имеет :место сигнал , пропорциональный ошибке между задаваемой и действительной скоростями двигателя опорного канала 8, подаваемый через .корректирующий контур на шестой вход сумматора 14 управляемого канала 7. При отсутствии 01 сигнал обеспечивает необходимую скорость вращения двигателя опорного канала 8, а преобразованный через блок 10 - необходимую скорость вращения двигателя управляемого канала 7. Скорости 2у, 2о двигателей каналов 7, 8 р-авны по величине, но противоположны по знаку. Выходной вал дифференциала 11, а следовательно и элемент 13, неподвижны. Сигнал UB с гзмерителя 6 равен нулю. Сигнал Ь с измерителя 4 и сигнал f/fi с измерителя 5, вычитаясь на сумматоре 14, не оказывают влияния «а работу привода. В связи с тем, что выходной вал дифференциала 11 неподвижен, то взаимовлияние каналов 8, 9 через дифференциал // не проявляется, так как сателлиты дифференциала 11 совершают обкатку относительно его водила. При наличии входного сигнала 9i за счет сигнала U, с блока W двигатель управляемого канала 7 вращается с постояниой опорной .скоростью, а за счет сигналов, пропорциональных ошибке 6 с элемента / и производной от входного сигнала 9 с измерителя 2, двигатель олорного канала 8 обеспечивает отклонение скорости Qy от ее опорного значения, обеспечивая, тем Самым, движение элемента 13 со скоростью QH , пропорциональной задаваемой скорости QI. Сигнал С/а с измерителя 4, вычитаясь из сигнала Uc, с измерителя 5, обеспечивает на входе сумматор-а М разность (f/6 -Ua) пропорциональную задаваемой скорости QI. Измеритель 6 вырабаты.зает сигнал (/в, также пропорциональный задаваемой скорости QI. В зависимости от того, какой сигнал U или (f/g - U) оказывается .преобл1адающим, тот и оказывает стабилизирующее действие на управляемый канал 7 следящего привода. Таким образом, измерители 4, 5, 6 реализуют расщепленную обратную связь, уменьщающую влияние погрещностей меха.нических передач //, 12 на динамику привода. За счет отклонения д V от исходного значения, обеспечивающего опорные скорости Qy, S,,, преобразованного в блоке 10, обеспечивается компенсация моментных составляющих ошибки 6 следящего привода. Это объясняется тем, что, если на выходе опорного канала 8 действует момент MO, то он .вызывает изменение скорости Q о что измеряется измерителем 3. За счет отклонения QO от заданного значения f/o изменяется , а это вызывает изменение сигнала t/j, на входе сумматора 14, что и вызывает компенсацию моментной составляющей ошибки 6 следящего привода.
Введение расщепленной обратной связи позволяет .повысить точность двухканального следящего привода.
Формула изобретения
Двухканальный следящий привод, содерж.ащий управляемый и опорный каналы, подключенные через дифференциал и редуктоо к нагрузочному элементу, первый сумматор, выходом иодключенный входу управляемого канала, источник опорного напряжения, подключенный через второй сумматор ко входу опорного канала, первый измеритель скорости, входом подключенный ко входу чувствительного элемента, а выходом - к первому входу первого сумматора, второй измеритель скорости, входом подключенный к выходу опорного канала, а выходо.м - к первому входу второго сумматора, выход -нагрузочного элемента подключен ко второму входу чувствительного элемента, отличающийся тем, что, с целью повыщения точности привода, он со.держит блок коррекции, входом подключенный к выходу второго сумматора и третий, четвертый и пятый измерители скорости, вход третьего измерителя скоР.ОСТИ соединен с выходо-м опорного канала, а выход - с третьим входом .первого сумматора, вход четвертого измерителя скорости соединен с выходом управляемого канала, з выход - с четвертым входом первого сумматора, вход пятого измерителя скорости соединен с выходом редуктора, а выход - с пятым входом первого сумматора.
Источники информации, принятые во внимание при экспертизе:
1.Школьников Г. М. и др. Некоторые устройства и ра.сч.ет систем многодвигательного привода с механическим дифференциалом, Элеютричество, № 8, 1958 г.
2.Ефимов И. Г. Дискретная система электропривода с широким диапазоном регулирован.ия скорости. Л., ЛДНТП, 1969, с. 48-57.
l/x
LT
-i 

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| Двухдвигательный следящий привод | 1977 |
|
SU650051A1 |
| Двухканальный следящий привод | 1975 |
|
SU579596A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Двухканальный следящий привод | 1974 |
|
SU515083A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |