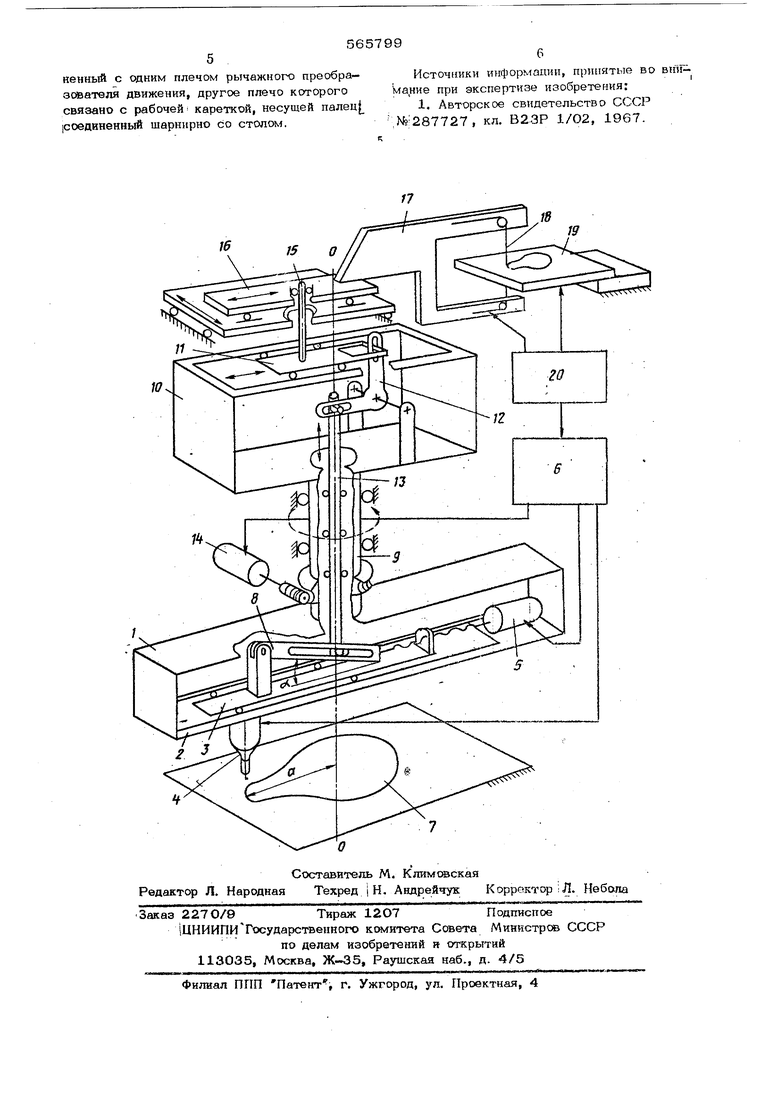
(54) ФОТОКОПИРОВАЛЬНОЕ УСТРСЙСТВО К- ЭЛЕКТРОЭРОЗИОННОМУ СТАНКУ На чертеже изображена принципиальная схема предлагаемого устройства. На поворотной травгрсе 1 на направляющих 2 установпена масштабная каретка 3 с фотодатчиком 4, Масштабная, каретка 3 свя аана с приводом 5, управляемым фотокопир вальной следящей системой 6. Под траверсой 1 и фотодатчиком 4 расположен неподвижно HP основании увеличенный чертеж-копир 7. На масштабной каретке 3 укреплена линейка 8, Траверса жестко связана посредством вала 9 с вилкой 10, тде на направляющих установлена раОочая каретка 11, кинематически связанная при помощи рычажного преобразсжателя движения 12 и вертикального штока 13с ; личейкой 8. Вся система снабжена приводом 14| обеспечивающим вращение ее относительно оси (Х-0, Этот привод управляется nocpeociw той же фотсжопирсжальной следящей системы 6. На рабочей каретке 11 жестко закреплен палец 15, другой конец которого шарнирно соединен с ходовой плитой двухкоордйнатного рабочего стола .6, перемещающегося по взаимно перпендикулярным направляющим. С ходовой плитой рабо чего стола 16 связана рабочая скоба 17 с с электродом-инструментом 18. Эл ктродинструмент 18 и ааготсзбка 19, укрепленйая на основании, питаются от электроэро знонвого генератора 2 О. Работа устройства происходит следующим образом. Электродйнгатели приводсв подачf 5 и 14 управляемые от фотокопиршальной сйедяшей системы в, приводят в линейное движем . вне Масщтабную каретку 3hc фотодатчиком 4 и линейкой 8 н осуществляют поворот всей системы: траверсы 1, рабочей карегпси 11 со шт(исом 13 и пальцем 15. Линейное перемещение масщтабной карета кя 3 с помощью линейки 8, 13 и рычажного преобразователя движения 12 аропорциовально преобразуется в линейное оеремешениё рабочей каретки 11с пальнем 15. Величина масщтабного коэффициента М эжду перемещениями масщтабной каретки 3 и рабочей каретки 11 при условии равенства плеч рычажного пресЛразователя дввсч жени1| шределяется так: L.. tgoi . Величина же /глоеого перемещения масш табной каретки 3 и рабочей каретки 11 от яосит«йьнооси ОиЮ не масштабируется и остается постоянной. Двухкоордияатный стол 16, ведомый дельцем 15,-совершает сложное движение, состоящее одновременно из поступательновращательного поворота относительно О-О и линейного перемещения в нап)авле- НИИ движения рабочей каретки 3.Поступательно-вращательное цвижение ходовой, плиты стола 16 образуется как сложение двухлинейных перемещений по координатам стола Х и У. Таким образом, вращательное и радиальное движение фотодатчика 4 от приводов 5 и 14 преобразуетсяв поступательно-вращательное движение координатного стола 16 с электродом-инструментом 18, так что линия чертежа 7 непрерывно проходит под объективом фбтодатчика 4 и электрод-инструмент 18 вырезает в заготовке J.9 уменьшенную копию чертежа-копира 7. При реализации изобретения, например, в фотокопировальном электроэрозионном прсжолочно-вырезном станке повышается точность изготсйвления деталей, что позволит в 5-10 раз снизить трудоемкость дальнейшей слесарной дсжодки обработанной пс верхности, а в ряде случаев полностью ее ликвидировать; значительно облегчается операция перехода с масштаба на масштаб и псявышается ее точность; полностью автоматизируется процесс изгот(жления деталей и оператор сможет эксплуатировать однсжременно несколько станков. Кроме того, предлагаемое устройство позволнт вьфезать детали любой сложно конфигурации, которые практически невозмож но выполнить другими способами обработки. Формула изобретения Фотсяс1Й1Ир№альное устройство к электроэрозионному станку для сложно-профильного вырезания электрод ом-проволок ой. перемаГыt ванием по I направляющим элементам закреп ленной /на двухкоординатном столе скобы, по увеличенному чертежу-кмтиру, считывание с кугурого осуществляется с помощью фото датчика, устан(жленного на поворотной трв верее, отличающееся тем, что, с целью повышения точности путем одно- коорд1инатмого масштабирования, фотодатчнк установлен на каретке, имеющей вoэмoжli ность перемещения вдоль траверсы и кинематически связанной со столом посредством масштабирующего механизма, В1ЫполнеНного в виде .закрепленной на i упомянутой каретке перпендикулярно к плоскости ее перемещения углсязой линейки, с которойподвижно связав с возможносттхЮ перемещения шток, соед
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОЭРОЗИОННЫЙ АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ПРОШИВАНИЯ ОТВЕРСТИЙ В ТЕЛАХ ВРАЩЕНИЯ | 1991 |
|
RU2032505C1 |
| Электроискровой станок для обработки микродеталей | 1987 |
|
SU1495034A1 |
| МНОГОЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ МАСШТАБНОГО КОПИРОВАНИЯ | 1970 |
|
SU270927A1 |
| Способ фотокопировальной обработки и устройство для его осуществления | 1979 |
|
SU770751A1 |
| Способ электроэрозионной обработки | 1981 |
|
SU933349A1 |
| Электроэрозионный станок | 1980 |
|
SU948598A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| Фотокопировальное следящее устройство | 1979 |
|
SU772784A1 |
| МНОГООПЕРАЦИОННЫЙ МЕТАЛЛООБРАБАТЫВАЮЩИЙ СТАНОК | 2005 |
|
RU2290283C1 |
| Станок для электроэрозионной обработки | 1983 |
|
SU1283000A1 |
