54) РОБОТ К ЛИСТСЯаТАМПОВОЧНрМУ ПРЕССУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Рука манипулятора | 1982 |
|
SU1166989A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Робот к листоштамповочному прессу | 1979 |
|
SU782993A1 |
| Робот к листоштамповочному прессу | 1980 |
|
SU880580A1 |
| Робот к листоштамповочному прессу | 1979 |
|
SU863329A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |

Изобретение относится к обработ-. ке металлов давлением, в частности к устройствам для подачи в штамп и удаления из него штучных листовых заготовок и дёталей.
. Известен робот к листсяатамповочиому прессу, содержащий станину, смонтированные в ней .Привод, связан аай с рукой,, несущей кисть со схватом, подъемный от плунжерного с напорным клапаном насоса стол для заголовок, кассетное устройство, пред.ставляюк1ее собой несколько стоек, установленных по контуру стопы за:готовок, и рычажный с реечно-шестерен атьЕм приводом манипулятор| 1 .
Недостатком данного робота является низкая надежность работы из-за жесткой связи кисти с;рукой. : Ближайшим к предлагаемому по совокупности существенных признаков и достигаемому эффекту является робот к листсяитамповочному прессу/ содержащий станину, смонтированные в ней привод и связанный с ним вал, несущий руку, на которой шарнирно закреплена с возможностью ЯЙВброта в. вертикальной плоскости кисть со схватом для деталей,,.установленный на руке дaтчик|связанный с системой уп-йАвления и закрепленный на кисти g(aчаг, связанный с рукой через пружину и взаимодействующий с датчиком 2 ,
Недостатком известного робота также является низкая надёжность работы, поскольку угол поворота рычага кисти относительно руки зависит от . радиального зазора в шарниреи,упругих угловых деформаций рычага и joic10ти, что приводит к низкой чувствительности системы управленияi
Цель изобретения - повышение надежности в работе робота.
Поставленная цель достигается тем,
15 что в роботе к листсилтамповочному прессу, содержащем станину, смонтированные в ней привод и связанный с ним вал, несущий руку, на который шарнирно закреплена с возможностью
20 поворота в .вертикальной плоскости кисть со схватом для детали, установленный на руке датчик, связанный с системой управления, и -лакрепленныййа кисти рычаг, связанный с рукой че25 рез пружину и взаимодействующий с датчиком, рычаг выполнен двуплечим, шарнирно закреплен на кисти с возможностью регулировочного поворота I в вертикальной плоскости и снабжен механизмом регулировочного поворюта, tf
выполненным в виде смонтированного на кисти винта, связанного с свободным концом рычага, и робот снабжен закрепленными на руке упором, ограничивающим поворот кисти в вертикальной плоскости.
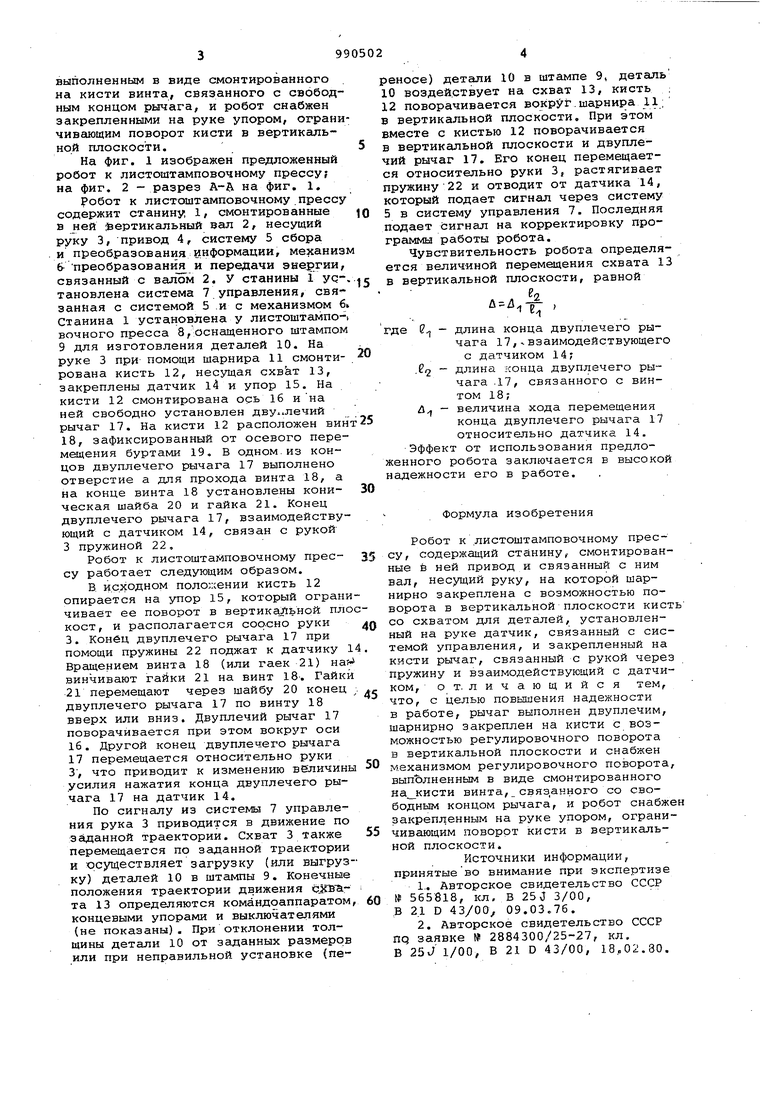
На фиг. 1 изображен предложенный робот к листоштамповочному прессу на фиг. 2 -разрез А-Д на фиг. 1.
Робот к листоштамповочному прессу содержит станину, 1, смонтированные в ней вертикальный вал 2, несущий руку 3, привод 4, систему 5 сбора и преобразования информации, механизм & преобразован11Я и передачи энергии, связанный с валом 2. У станины i уртановлена система 7 управления, свя занная с системой 5 .и с механизмом 6 Станина 1 установлена у листоштампо- вочного пресса 8, оснащенного штампом 9 для изготовления деталей 10. На руке 3 при помощи шарнира 11 смонтирована кисть 12, несущая cxBkT 13, закреплены датчик l4 и упор 15. На кисти 12 смонтирована ось 16 ина ней свободно установлен дву лечий рычаг 17. На кисти 12 расположен вин 18, зафиксированный от осевого перемещения буртами 19, В одном.из концов двуплечего рычага 17 выполнено отверстие а для прохода винта 18, а на конце винта 18 установлены коническая шайба 20 и гайка 21. Конец двуплечего рычага 17, взаимодействующий с датчиком 14, связан с рукой 3 пружиной 22,
Робот к листоштайповочному прессу работает следующим образом.
В исходном поло;:сении кисть 12 опирается на упор 15, который ограничивает ее поворот в вертика 1ьной плокост, и располагается соосно руки 3. Конец двуплечего рычага 17 при помощи пружины 22 поджат к датчику 1 Вращением винта 18 (или гаек 21) наг винчивают гайки 21 на винт 18-. Гайки 21 перемещают через шайбу 20 конец двуплечего рычага 17 по винту 18 вверх или вниз. Двуплечий рычаг 17 поворачивается при этом вокруг оси 16. Другой конец двуплечего рычага 17 перемещается относительно руки 3, что приводит к изменению величины усилия нажатия конца двуплечего рычага 17 на датчик 14.
По сигналу из системы 7 управления рука 3 приводится в движение по заданной траектории. Схват 3 также перемещается по заданной траектории и осуществляет загрузку (или выгрузку) деталей 10 в штампы 9. Конечные положения траектории движения cJfBaта 13 определяются командоаппаратом, концевыми упорами и выключателями (не показаны). При отклонении толщины детали 10 от заданных размеров или при неправильной установке (переносе) детали 10 в штампе 9, деталь Ю воздействует на охват 13, кисть : 12 поворачивается вокруг.шарнира 11; в вертикальной плоскости. При этом вместе с кистью 12 поворачивается в вертикальной плоскости и двуплечий рычаг 17. Его конец перемещается относительно руки 3, растягивает пружину22 и отводит от датчика 14, который подает сигнал через систему 5 в систему управления 7. Последняя подает сигнал на корректировку программы работы робота.
Чувствительность робота определяется величиной перемощения схвата 13 в вертикальной плоскости, равной
2
1 Е.
где Р длина конца двуплечего рычага 17,-взаимодействующего
с датчиком 14 длина конца двуплечего рычага .17, связанного с винтом 18;
л величина хода перемещения конца двуплечего рычага l7 относительно датчика 14. Эффект от использования предложенного робота заключается в высокой надежности его в работе.
Формула изобретения
Робот к листоштамповочному прессу, содержащий стйнину, смонтированные fe ней привод и связанный с ним вал, несущий руку, на которой шарнирно закреплена с возможностью поворота в вертикальной плоскости кист со схватом для деталей, установленный на руке датчик, связанный с системой управления, и закрепленный на кисти рычаг, связанный с рукой через пружину и взаимодействующий с датчиком, от. личающийся тем, что, с целью повышения надежности в работе, рычаг выполнен двуплечим, шарнирно закреплен на кисти с возможностью регулировочного поворота в вертикальной плоскости и снабжен механизмом регулировочного поворота, выполненным в виде смонтированного на кисти винта, связ,анного со свободным концом рычага, и робот снабже закрепленным на руке упором, ограничивающим поворот кисти в вертикальной плоскости.
Источники информации, принятыево внимание при экспертизе
Фи&.1 и Т т
