В числе ряда элементов, определяющих производительность канатно-подвесной дороги, немаловажное значение имеет скорость движения тягов.ого каната и связанных с ним грузовых вагонеток. В существующих системах канатно-подвесных дорог, заключающих в себе, в общем случае, ряд отклоняющих щкивов для трассировки дороги по намеченному в плане направлению, величина скорости лимитируется тем соображением, чтобы ири движении вокруг отклоняющих шкивов без отцепки вагонеток таковые не слищком отклонялись от вертикального положения центробежной силой. Обычно средняя величина скорости составляет 1,50-2,0 м/сек., причем эта величина сохраняется постоянной на всем протяжении данной канатноподвесной дороги, несмотря на то, что на участках между поворотными пунктами скорость движения вагонеток могла бы быть увеличена без опасения чрезмерного их раскачивания или отклонения центробежной силой.
Согласно изобретению, в основу предлагаемого способа приведения в действие канатно-подвесной дороги и положено соображение о возможности сообщения тяговому канату и связанным с ним вагонеткам больщей скорости между поворотными пунктами. Таким образом, тяговому канату с прикрепленными к нему грузовыми вагонетками сообщается переменная скорость, уменьщаемая при проходе вагонеток по отклоняющим шкивам и увеличиваемая на участках между поворотными пунктами. При этом, как нетрудно убедиться, средняя скорость будет больще, чем в канатно-подвесных дорогах с постоянной скоростью движения тягового каната.
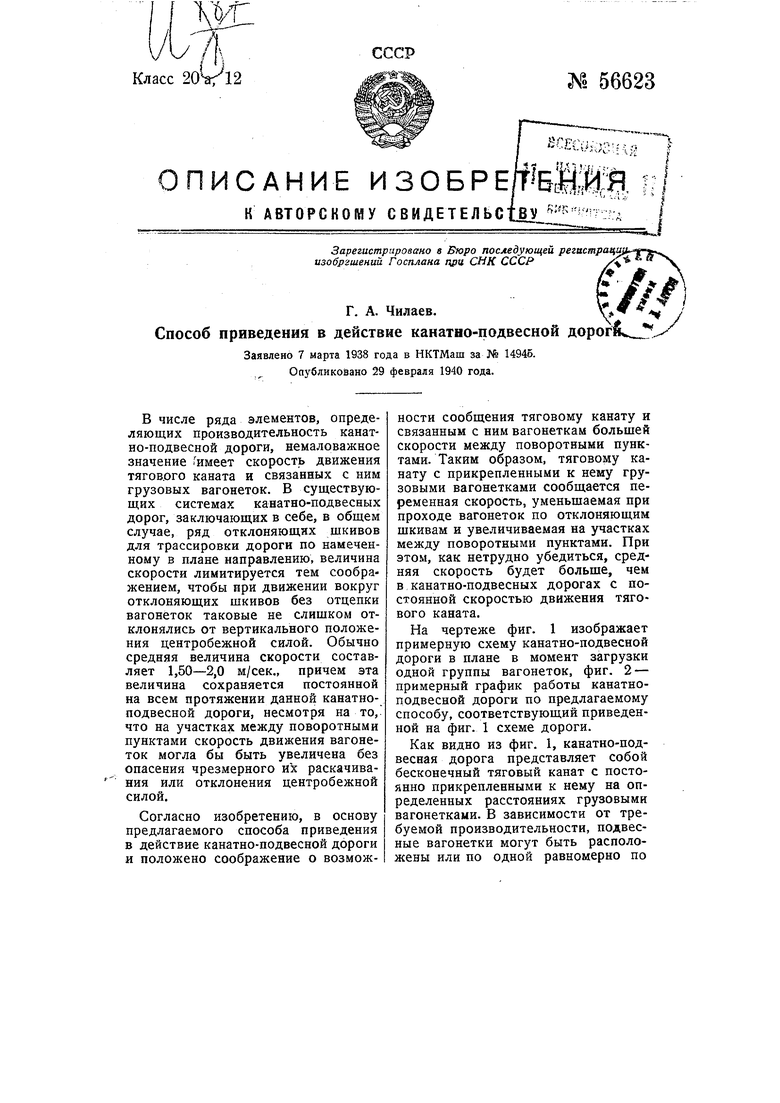
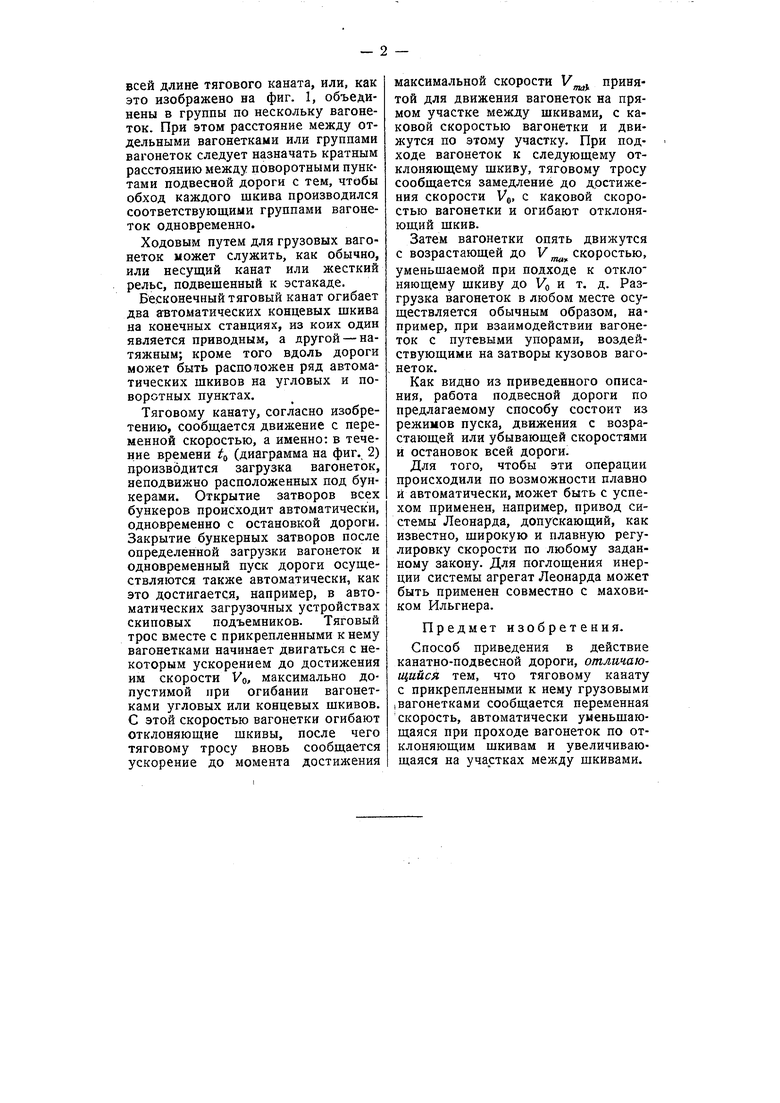
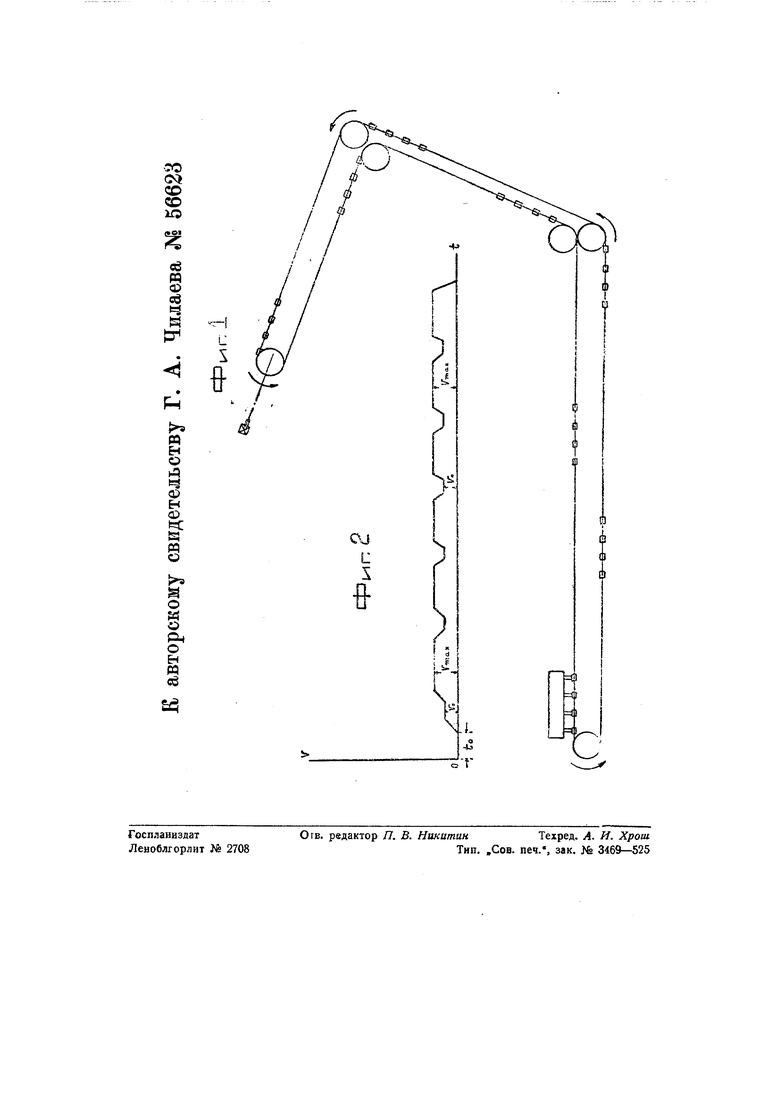
На чертеже фиг. 1 изображает примерную схему канатно-подвесной дороги в плане в момент загрузки одной группы вагонеток, фиг. 2 - примерный график работы канатноподвесной дороги по предлагаемому способу, соответствующий приведенной на фиг. 1 схеме дороги.
Как видно из фиг. 1, канатно-подвесная дорога представляет собой бесконечный тяговый канат с постоянно прикрепленными к нему на определенных расстояниях грузовыми вагонетками. В зависимости от требуемой производительности, подвесные вагонетки могут быть расположены или по одной равномерно по
всей длине тягового каната, или, как это изображено на фиг. 1, объединены в группы по нескольку вагонеток. При этом расстояние между отдельными вагонетками или группами вагонеток следует назначать кратным расстоянию между поворотными пунктами подвесной дороги с тем, чтобы обход каждого шкива производился соответствующими группами вагонеток одновременно.
Ходовым путем для грузовых вагонеток может служить, как обычно, или несущий канат или жесткий рельс, подвешенный к эстакаде.
Бесконечный тяговый канат огибает два автоматических концевых шкива на конечных станциях, из коих один является приводным, а другой - натяжным; кроме того вдоль дороги может быть распо1ожен ряд автоматических шкивов на угловых и поворотных пунктах.
Тяговому канату, согласно изобретению, сообщается движение с переменной скоростью, а именно: в течение времени 4 (диаграмма на фиг. 2) производится загрузка вагонеток, неподвижно расположенных под бункерами. Открытие затворов всех бункеров происходит автоматически, одновременно с остановкой дороги. Закрытие бункерных затворов после определенной загрузки вагонеток и одновременный пуск дороги осуществляются также автоматически, как это достигается, например, в автоматических загрузочных устройствах скиповых подъемников. Тяговый трос вместе с прикрепленными к нему вагонетками начинает двигаться с некоторым ускорением до достижения им скорости УО, максимально допустимой при огибании вагонетками угловых или концевых шкивов. С этой скоростью вагонетки огибают отклоняющие шкивы, после чего тяговому тросу вновь сообщается ускорение до момента достижения
максимальной скорости V. принятой для движения вагонеток на прямом участке между шкивами, с каковой скоростью вагонетки и движутся по этому участку. При подходе вагонеток к следующему отклоняющему щкиву, тяговому тросу сообщается замедление до достижения скорости Vj, с каковой скоростью вагонетки и огибают отклоняющий щкив.
Затем вагонетки опять движутся с возрастающей до V скоростью, уменьшаемой при подходе к отклоняющему шкиву до 1/0 и т. д. Разгрузка вагонеток в любом месте осуществляется обычным образом, например, при взаимодействии вагонеток с путевыми упорами, воздействующими на затворы кузовов вагонеток.
Как видно из приведенного описания, работа подвесной дороги по предлагаемому способу состоит из режимов пуска, движения с возрастающей или убывающей скоростями и остановок всей дороги.
Для того, чтобы эти операции происходили по возможности плавно и автоматически, может быть с успехом применен, например, привод системы Леонарда, допускающий, как известно, широкую и плавную регулировку скорости по любому заданному закону. Для поглощения инерции системы агрегат Леонарда может быть применен совместно с маховиком Ильгнера.
Предмет изобретения.
Способ приведения в действие канатно-подвесной дороги, отличающийся тем, что тяговому канату с прикрепленными к нему грузовыми I вагонетками сообщается переменная скорость, автоматически уменьшающаяся при проходе вагонеток по отклоняющим шкивам и увеличивающаяся на участках между шкивами.