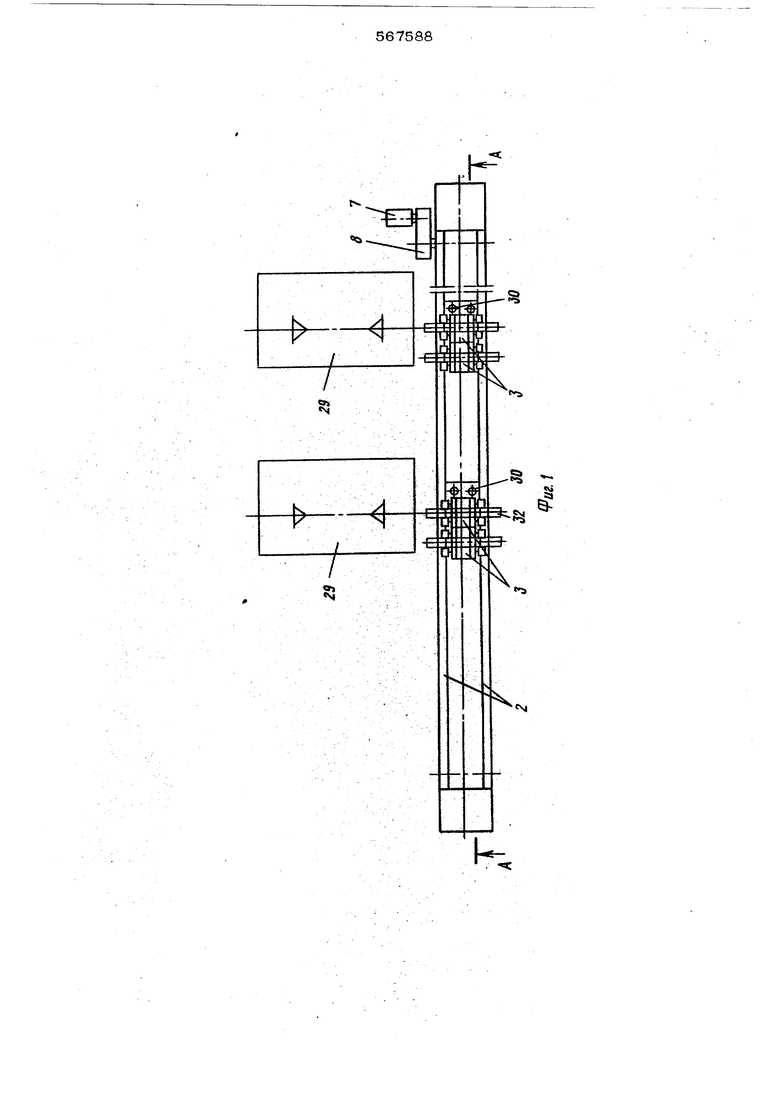
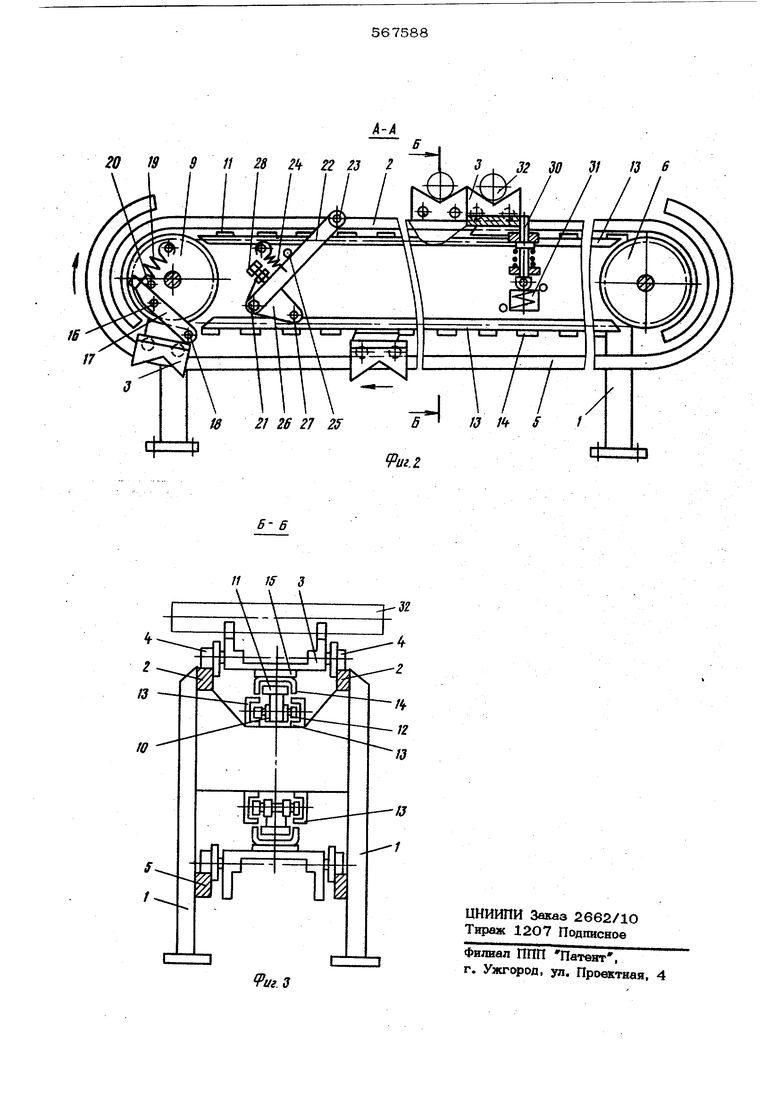
рон магниты 11, укреплены на спугниках 3 через диамагнитные прокладки 15, На звездочке 9 при помощи оси 16 щарнирно установлен рычаг 17с выступом 18, поджатый пружиной 19 к упору 20 укрепленному в звездочке 9, Выступ 18 этого рычага взаимодействует со скобами 14 cnyi НИКОВ 3. Посредством оси 21 на раме транспортера установлен рычаг 22 с роликом 23, прижимаемый пружиной 24 к упору 25 рамы транспортера. На этой же оси свободно устайовлен рычаг 26 с роликом 27, опирающийся на рычаг 22 при помощи винта 28. На позициях транспортера, с которых про изводится загрузка станков 29 автоматичеокой линии, установлены выдвижные упоры 30, приводимые в движение электромагнитами 31. ,Транспортер работает следующим образом. Спутникиз загружаются заготовками 32 в начале верхней ветви транспортера. Движущаяся вправо верхняя ветвь цепи 10 магнитами 11 увлекаег спутники 3 с заготовками 32 и перемещает их вправо. При подаче команды на загрузку того или иного стан ка выдвигается упор 30 на позиции этого станка и задерживает спутник 3 с загото&кой, не останавливая цепи Ip Автоопера тор станка (не показан) снимает со спутника заготовку и устанавливает на него обработанную деталь. После этого упор ЗО утапливается электромагнитом 31 и спутник 3 снова перемещается вправо вместе с цепью 10. При продолжительной остановке спу тнина на какой-либо позиции (например, из-за остановки станка) он задерживает и. спутники следующие за ним (не останавливая транспортер в целом), в результате чего на участке перед этим станком накапливаются спутники , с деталями, поступающими с предыдущего (работающего) станка. Теперь, в случае остановки )предыдущего станка, последующий может работать за счет накопленных деталей. Прощедщие через все позиции спутники разгружаются в конце транспортера между направляющими 2 и 5, а ведоК1ые магнитами 11 цепи Ю спутники 3 опускаются на нижнюю аетвь, перемешаются к началу транспортера и останавливаются в начале подъема из-за недостаточности усилия магнита для подъема тяжелого спутника. Однако вращающийся вместе со звездочкой 9 рычаг 17 выступом 18 захватывает спутник 3 за скобу 14 и перемещает его на верхнюю ветвь транспортера (при попаДании выступа 18 на продольную часть скобы 14 рычаг 17 отклоняется, растягивая пружину 19). сли в самом начале верхней ветви транопортера происходит накопление спутников (например при остановке первого станка линии), то находящиеся на этом участке спутники воздействуют на рычаг 22, утап™ « « результате опускается и рь 26 с роликом 27, препятствуя перемешению спутников по нижней ветви транспор Р звездочке 9с рычагом 17 (перемешающим спутники без просквльзьгаания). Тем самым предотвращается заклиинванве спутников в началетранспортера.. Ф о р м у л а и 3 о б ре тения 1.Транспортер аккумулирующего типа с транспортными спутниками, направляющими и бесконечной приводной цепью, о т л и ч аю щ и и с я тем, что, с целью упрощения конструкции к повьшгения срсжа службы он снабжен постоянными магнитами, аакреплен ными на приводной цепи, и скобами из ферромагнитного материала, установленными спутниках и связанными с корпусом спутника через диамагнитные прокладки. 2,Транспортер по п. 1, о т ли ч а ющ и и с я тем, что он снабжен подпружиненным рычагом, щарнирно установленным на звездочке цепи в начале транспортера и взаимодействующим со спутниками при их подъеме с нижней ветви транспортера на верхнюю, Источники информации, принятые во внимание при экспертиае: 1, Проспект фирмы Либхерр, ФРГ, Транспортеры, 1971.
20 W 9 // 28 2ft 22 гз 2
3 , 32 30 31 /J ff

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное устройство автоматической линии спутникового типа | 1980 |
|
SU956241A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Устройство для загрузки станков | 1978 |
|
SU1040713A1 |
| АВТО/\^АТИЧЕСКАЯ ЛИНИЯ УПАКОВКИ ИЗДЕЛИЙ | 1973 |
|
SU408741A1 |
| Автоматическая линия спутникового типа | 1983 |
|
SU1093487A1 |
| Автоматическая линия для изготовления деталей типа скоб | 1982 |
|
SU1134351A1 |
| Автоматическая станочная линия | 1974 |
|
SU536039A1 |
| Пакеторазборщик пиломатериалов | 1988 |
|
SU1613415A1 |
| Конвейер для перемещения деталей | 1973 |
|
SU611587A3 |