. :
Изобретение относнтса к механваапви куанечно-штампбиочного производства и может быть нспс1льзоаавр в устройствах для автоматической подачи листового матервала с подогвутымн кромками з трехвапяоЁые ЯЕстогибочныв валыш.
Известно устройство для загрузки листов В гвбо1В Ые Валыш; содержашее гс.таковпен « вые на ксфпусе захват, мехаввэм переноса в рычажный ПриводIlJ,Цель изобретения - сйеспечеть загрузку листов с подогнутыми кромками и повысить надежность устройства 6 работе.
jQля этого iпредлагаемое устройство снабжено кинематически связанными с механта мом переноса механизмами досылания я кан тования йиста.
Механизм досылания листа выполнен в виде связанных с рычагами привода, поао озных а ппоск ти; загрузки напрдвлякхцих, вэаимодействукхцих с листом за счет свя Трения.
Механизм кантования листа выполнен в ви&е поворотного в плоскости загрузки, состоящего из двух телескопически соёднненныХ| подпружиненных частей рычага оягн конец которого связан с приводом, ei другой несёт ролик« взаимодействуюший с листом,
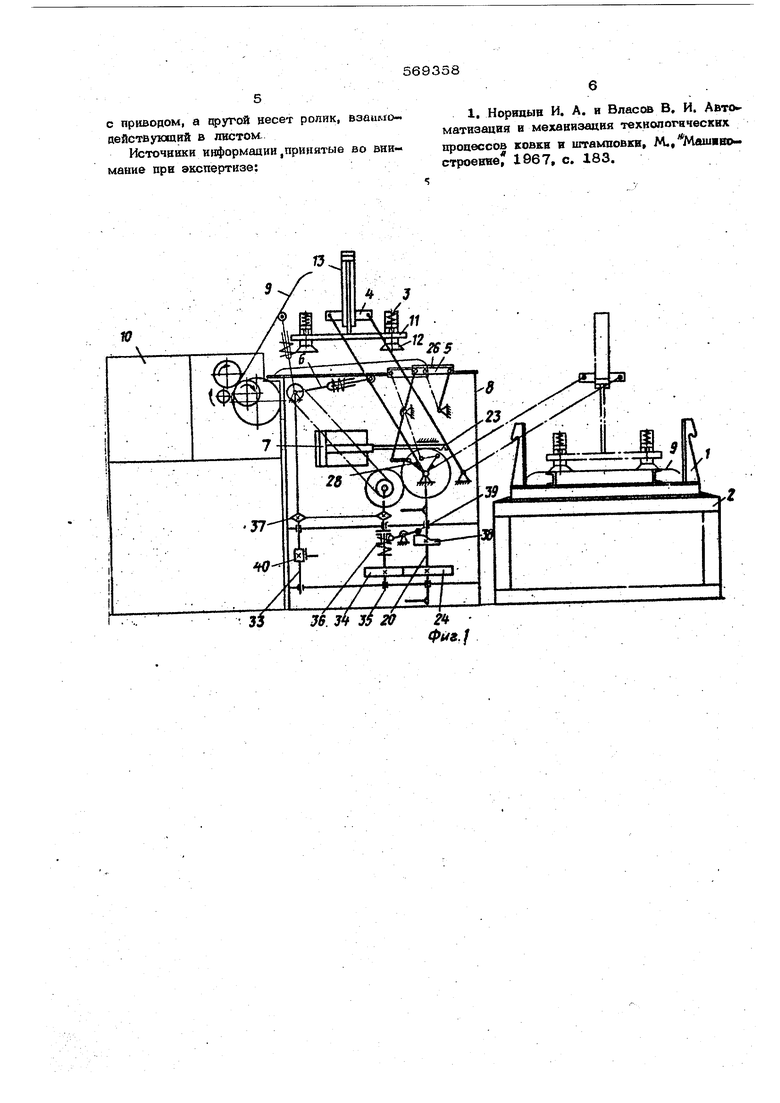
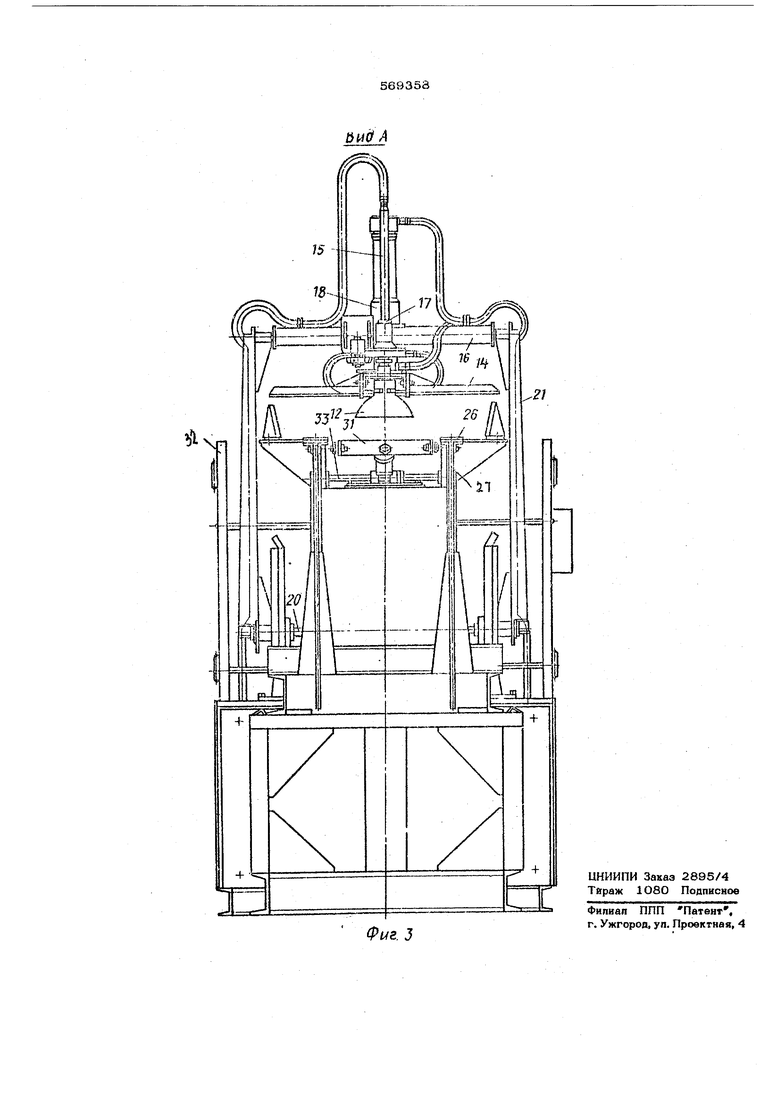
На фиг. 1 дана кинематическая схема устройства; на фиг. 2 PCиcывaeмoe уст ройстао, общий ввд; нафвг. 3-вид по стрелке А на фиг. 2,,
Устройство для автоматической подачя
листов с подогнутымв) кромками еяздержит тару 1, подставку 2, захват 3, механизм 4 переноса, досылатель 5, к ггователь в, привод 7 в стол 8. Тара 1 представляет собой свар конструкцию, предназначенНую UIS транспортировки заготовок 9 листов водогнутыми {фомкамн с преды« душей операции к гибочным вальцам 10 Подставка 2 служит для точной установке тары I .на гибочную риэзидшо. Захват 3 состоит из .поперечины ii с двумя вакуумНЬ1Ми нерегулируемыми присосами 12, смов тированиой на штоке пневмоцилиндра 13.Для предохранения резиновых присосов 12 от механических повреждений на поперечв-
не 11 установлены четыре предохранитель«ых упора 14. Дня предотвращения проворота поперечины относитеньно механизма 4 Ьеревоса на поперечине 11 закреплены направляющие колонки 15. Пневмоцилиндр 13 с поперечиной 11 закрепляется на траверсе 16 механизма 4.
Механизм 4 переноса представляет собой шарнирный четырехзве}шый механизм, выполненный в виде параллелограмма, он состоит из траверсы 16 с втулками 17 под направляющне колонки 15, разрезной втулки 18 для крепления пневмоцилиндра 13; двух при водных рычагов 19, сидяших на валу 2О, и двух неприводных рычагов 21. Рычагами 19 и 21 траверса 16 связана со стойками 22, установленными на столе 8. .Вал ДО получает вращение, от привода 7 посредство рейки 23, закрепленной на штоке пневмшн линдра, и зубчатого колеса 24, с.ндяшего на валу 2О,
: Лосылатель 5 прерк:тавл$1ет1собой два шарнирных четырехзвенных мехааиама, вы полненных в виде параллелограмма и связанных обшей осью 25, и состоит из двух направляющих 26, которые для усиления
сцепления с заготовкой 9 покрыты материв лом, имеющим ЦысоЕИЙ коэффициент трения, например резиной, двух пар рычагов 27 и общей оси 25. Досылатель. 5 перемешаетря от вала 2О шарнирным механизмом, содер.жащем коромысло 28« шатун 29 и рычаг ЗО, жестко связансиый с одним из рычагов
-27. . . - . . ,. ,; ;..
Кантователь 6 содержит подпружиненную вилку 31, имеющую возможность осевого перемещения в рычаге 32..(: одного
прохода подогнуто о конца заготовки 9 при захвате ее валками листогибочных вальцов 1О. Рычаг 32, сидящий на валу 33, полу чает вращение ат вала 2О через зубчатые колеса 24 и 34,- вал 35, сидящую на нем фрикциьнную муфту 36 и цепную передачу 37. Для включения вращения муфта 36 управляется кулачком 38, который посредством рычага 39 отжимает подпружиненную полумуфту и разрывает кинематическую цепь. На валу33 установлен фршщионный тормоз 4О, фикснрукший рычаг 32 кантователя 6 при размыкании кинематической цепи муфтой 36, Привод 7 представляет собой пневматический цилиндр с дроссельным регулированием скорости хода. К штоку цилиндра крепится рейка 23, Установлен цилиндр На подставке 41, которая в свою очередь крепите к стопу 8. На столе 8 смонтированы все узлы устройства за лсключением тары 1 и попставки 2. В нише стола 8 смонтирована система 42 автоматического з равления, обеспечивающая работу устройства и гибочных вальцов в ав TOMaTH4f«KOM режиме.
При перемещении рейки 23 вправо механизм 4 переноса перемещает захват 3 к таре 1 на позицию загрузки. В этом пола- жении шток пневмшилйндра 13 опускает вниз на стопу заготовок 9 поперечину 11 с ЦфЕЮОсамв i 12. Происходит захват оласА заготовки 9 и поперечина 11 с захваченной заготовкой перемещается вверх. После атого механизм 4 переноса перемещает захват
3влевов исходное положение и заготовка 9 сбрасываете я/на направляющие 26 до сьшателя 5, Досылатель 5 в кантователь в работают параллельно с механизмом 4. по реноса. Во время переме1аения механизма
4переноса вправо к е&ре 1 досылатель 5 подает заготовку 9, оставшуюся от предыдущего цикла, в рабочие валки гибочных вальцов 1О. Когда механизм 4 т.ереноса с за- хватом 3 освобождает зону над кантовате лем 6, ролик рычага 39 заскакивает во впадину кулачка 3 и муфта 36 включает вращение вала 35 и кантователь 6 подни- мает правый конец заготовки 9, обеспечивая захват ее рабочими валками гибочных вальцов lOj..
При перемещении механизма переноса 4 влево в исходное положение, кантователь6 опускается вниз, а досылатель 5 перемещается вправо в исходное положение.Заготовка 9 сбрасывается на направлнк щие-26 досылателя 5 и цикл повторяется.
Формула изобретения
1,Устройство для .загрузки листов в. гибочные вальцы, содержащее установленные на корпусе захват, механизм перенос.а и рычажный привод, отличающеес я тем, что, сцелью обесиечевня загрузки листов с подогнутыми кромками и повыще ннй надежности устройства в работе, оно снабжено кинематически связанными с меха низмом переноса механизмами досылания н кантования листа.
2,Устройство по п. 1, о т л и ч а ющ « е с я тем, что механизм досылания листа выполнен в виде связанных с рычага ми привода, поворотных в плоскости загрузн KB направляющих, взаимодействующих с листом за счет сил трения.
3,Устройство по п. 1, о т л и ч а ющ е е с я тем, что механизм кантования листа выполнен в виде поворотного в плос кости загрузки, состоящего из двух телескопически соециненных, подпружиненных частей рычага, один конец которого связан
с приводом, а другой несет ролик, взаимоаейотвующнй в листом
Источннки инфор| ЗДИИ,принятые во вни мание прв экспертизе:
1. Норнаыв И. А. и Власов В. И. матизацвя в мехвцизацвя технологических {фоцессов ковкв н штамповки, M.,MaiuHBDi- строение 1967, с. 183.
| название | год | авторы | номер документа |
|---|---|---|---|
| Листогибочное устройство | 1979 |
|
SU841737A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для сборки цепей | 1979 |
|
SU854547A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Автоматическое устройство для передачи рессорных листов в штампы закалочного барабана и укладки их на конвейер отпускной печи | 1960 |
|
SU133073A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Устройство для подачи листового материала в зону резания и уборки отходов | 1981 |
|
SU1005995A1 |
| Автоматизированный комплекс для многопереходной листовой штамповки | 1982 |
|
SU1015984A1 |
| Линия сращивания древесины по сечению | 1990 |
|
SU1784456A1 |

ys.j4 j/ ei
И
фиг.
