емой детали 6, связанными со штоком 7 посредством шарнирного многозвенника 8. Ось 9 клещей 5 закреплена в гильзе 4.
Манипулятор содержит также размещенную в гильзе 4 пружииу 10, воздействующую на шток 7 и обеспечивающую зажим конца детали 6 с постоянным усилием, не зависящим от положения гильзы.
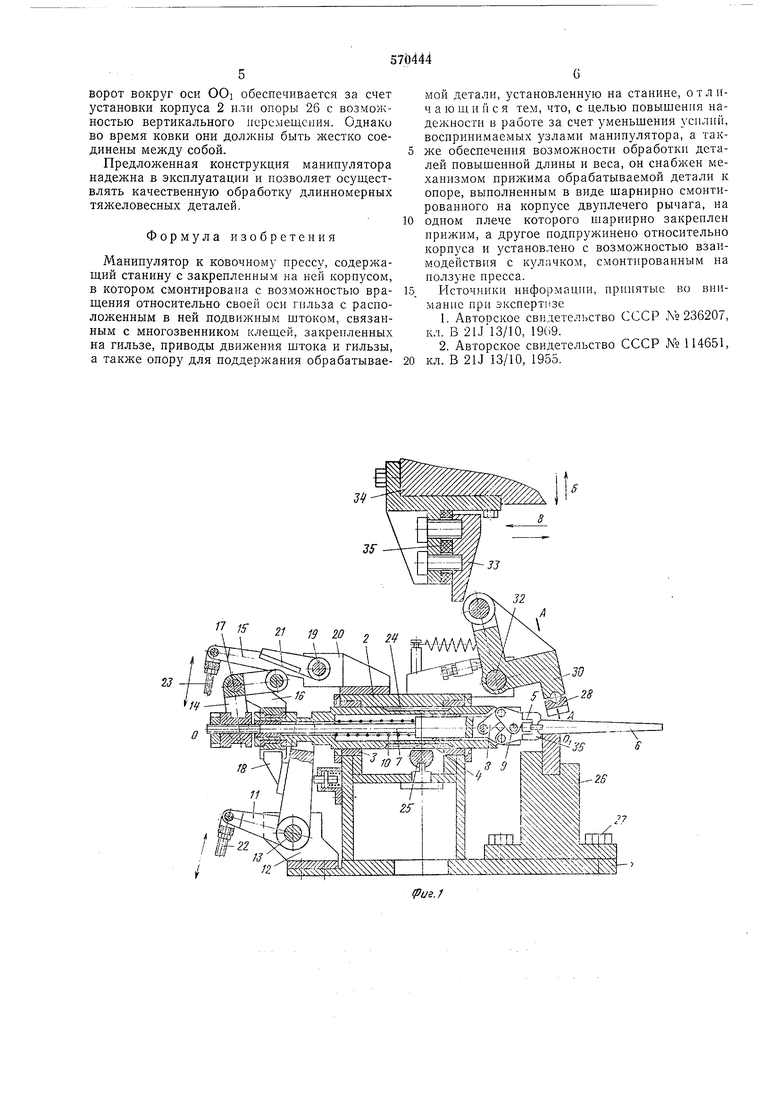
Привод манипулятора содержит кулачковый вал (не показан), управляющий поворотом рычага 11, установленного на станине 1 в кронштейне 12 на оси 13, имеющего на верхнем конце вилку (не обозначена), охватывающую гильзу 4, и обеспечивающего осевое перемещение последней.
Привод содержит также рычажную передачу для разжима клещей 5, управляемую тем же кулачковым валом, воздействующую на щток 7 и снабженную двумя рычагами 14 и 15. Рычаг 14 установлен в кронштейне 16 с возможностью поворота вокруг оси 17, перекрещивающейся под прямым глом с осью OOi гильзы 4. Кронштейн 16 установлен на гильзе 4 и связан с ней в направлении ее оси. Для предотвращения вращения кронштейна 16 при вращении гильзы 4 вокруг оси OOi имеется стопор 18. Он может быть жестко связан с рычагом 11 п входить в паз (не обозначен) кронштейна 16 или, наоборот, может быть закреплен на этом кронштейне.
Рычаг 15 установлен на оси 19 в кронштейне 20, закрепленном на корпусе 2. Одно плечо рычага 15 имеет наружную кулачковую поверхность 21, в частности плоскую, воздействующую на рычаг 14. Поворот рычагов 11 и 15 происходит от кзлачкового вала через промежуточные передачи (не ноказаны), выполненные известным образом, и тяги 22 и 23. Вращение гильзы 4 с клещами 5 вокруг оси OOi осуществляется через компенсатор, представляющий собой фрикционную муфту (не показана), и зубчато-реечную передачу, зубчатое колесо 24 которой образовано зубьями, нарезанными непосредственно на самой гильзе. Зубчатая рейка 25 этой передачи установлена в направляющих (не показаны), а перемещение ее огранпчивается упорами (не показаны), определяющими угол поворота гильзы 4 с клещами 5.
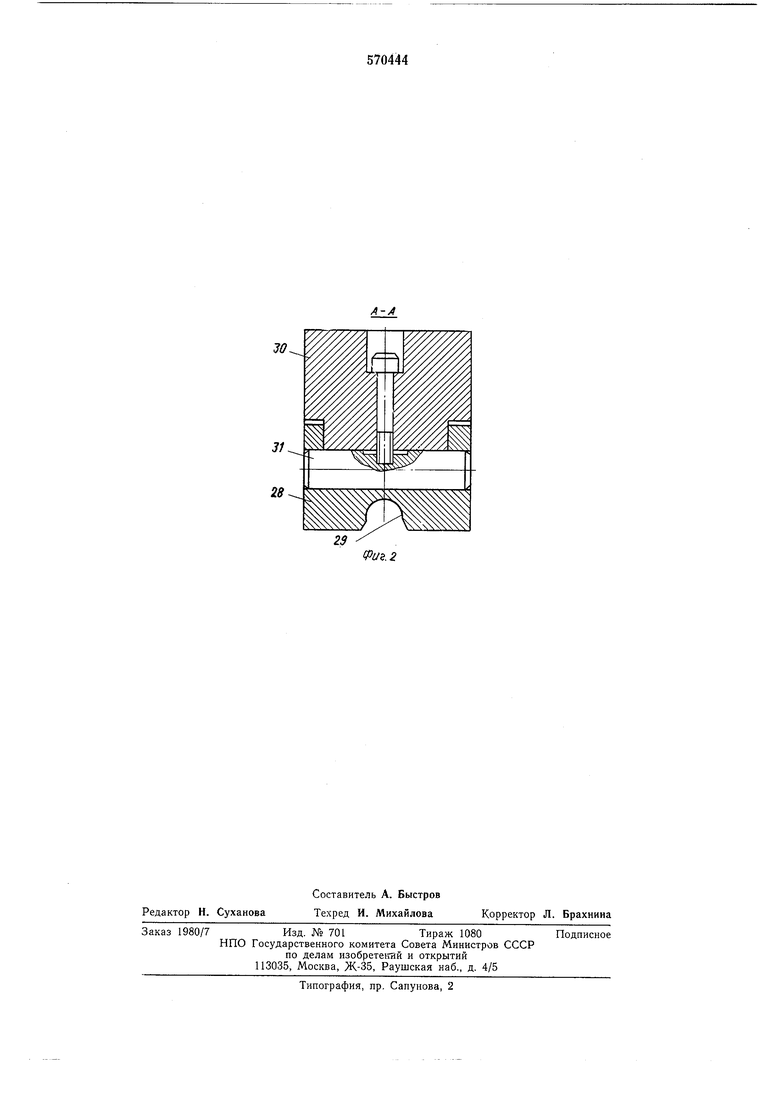
Манипулятор содержит опору 26, поддерживающую обрабатываемую деталь 6 и закрепленную болтами 27 на станине 1, жестко соединенной с корпусом 2. Для фиксации обрабатываемой детали 6 на этой опоре имеется прилсим 28 с выемкой 29, соответствующей профилю детали 6, шарнирно установленный на рычаге 30 посредством оси 31, параллельной оси 32 поворота этого рычага в корпусе 1.
Привод поворота рычага 30 и фиксации детали 6 на опоре 26 содержит кулачок 33, установленный с возможностью возвратно-поступательного перемещения вместе с ползуном 34 (показан условно) ковочного пресса в направлении стрелки Б и имеющий возможность поступательного перемещения в направлении В благодаря наличию резиновой подушки 35.
Возможен вариант выполнения устройства с
подушкой, размещенной между кулачком 33 и
ползуном 34 в направлении стрелки Б. В этом
случае кулачок 33 совершает перемещение
только по стрелке Б вместе с ползуном 34 и
относительно этого ползуна.
Жесткость резиновой подушки 35 по меньшей мере на порядок больше, чем жесткость пружины 10. Жесткость этих элементов определяется усилием ковки, действующим на манинулятор, необходимостью некоторого перемещения обрабатываемой детали 6 в клещах 5 при фиксации ее на опоре 26, а также необходимостью надежного зажима с усилием, не вызывающим значительных деформаций детали 6 в зоне опоры 26. Работает манипулятор следующим образом.
Обрабатываемая деталь 6 подается транспортером (не показан). При совмещении ее оси с осью манипулятора 00 клещи 5 вместе с гильзой 4 под действием рычага 11 от кулачкового вала перемещаются вдоль оси OOj
и при соответствующем перемещении штока 7 под действием пружины 10 зажимают хвостовик детали 6. При последующем осевом перемещении гильзы 4 с клещами 5 под действием того же рычага 11 деталь 6 подается в зону
ковки. После осуществления первого перехода обработки деталь 6 при повороте гильзы 4 может быть повернута на любой заданный угол для последующей, в частности многократной обработки. Поворот осуществляется от кулачкового вала через компенсатор, зубчатую рейку 25 и зубчатое колесо 24. Регулировка угла поворота детали 6 происходит путем регулировки хода рейки 25.
Сближение губок 36 клещей 5 иод действием
пружины 10, размещенной в гильзе 4 и перемещающейся вместе с ней, обеспечивает постоянное зсилие зажима обрабатываемой детали 6 независимо от осевого положения клещей 5. Разжим последних и освобождение детали 6 осуществляется от кулачкового вала через рычажную передачу, содержащую рычаги 14 и 15. Отсутствие связи между этими рычагами и установки рычага 14 на гильзе 4 обеспечивает его перемещение вместе с гильзой и
освоболадение детали 6 в любой заданный момент.
Во время ковки при опускании ползуна 34 пресса он воздействует через резииовую подущку 35 и кулачок 33 на рычаг 30, осуществляя фиксацию обрабатываемой детали 6 на опоре 26.
Предлагаемый манипулятор в случае необходимости может быть установлен с возможностью поворота вокруг осей, перпендикулярных к оси ОО), а также с возможностью поступательного перемещения вдоль этих осей. Во время перемещений детали 6 поддерживаются опорой 26. В случае использования манипулятора при
обработке деталей некруглого сечения их поворот вокруг оси OOi обеспечивается за счет установки корпуса 2 или опоры 26 с возможностью вертикального перемещения. Однако во время ковки они должны быть жестко соединены между собой.
Предложенная конструкция манипулятора надежна в эксплуатации и позволяет осуществлять качественную обработку длинномерных тяжеловесных деталей.
Формула изобретения
Манипулятор к ковочному прессу, содержащий станину с закрепленным на ней корпусом, в котором смонтирована с возможностью вращения относительно своей оси гнльза с расположенным в ней подвижным щтоком, связанным с многозвенником клещей, закрепленных на гильзе, приводы движения штока и гильзы, а также опору для поддержания обрабатывае6
мой детали, установленную на станине, о т л ич а ю щ и и с я тем, что, с целью повышения надежности в работе за счет уменьшения усилий, воспринимаемых узлами манипулятора, а также обеспечения возможности обработки деталей повышенной длины и веса, он снабжен механизмом прижима обрабатываемой детали к опоре, выполненным в виде шарнирно смонтированного на корпусе двуплечего рычага, на
одном плече которого шарнирпо закреплен прижим, а другое подпружинено относительно корпуса и установлено с возможностью взаимодействия с кулачком, смонтированным на ползуне пресса.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР До 236207, кл. В 21Jl3/10, 19(.9.
2.Авторское свидетельство СССР № 114651, кл. В 21J 13/10, 1955.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кузнечный манипулятор | 1975 |
|
SU580053A1 |
| Многопозиционный горизонтальный пресс для объемной штамповки | 1981 |
|
SU1031620A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| СТАНОК ДЛЯ СБОРКИ ГИБКОГО ЭЛЕЛАЕИТА С ЖЕСТКИМИ ДЕТАЛЯМИ | 1972 |
|
SU327961A1 |
| Устройство для транспортирования деталей низа обуви при обработке их по контуру | 1983 |
|
SU1136793A1 |
| Кузнечный манипулятор | 1981 |
|
SU975170A1 |
| Ленточно-шлифовальное устройство | 1978 |
|
SU891364A2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ ПАЗОВ В ОТВЕРСТИИ ДЕТАЛИ | 1992 |
|
RU2088385C1 |