О5
о
4
О)
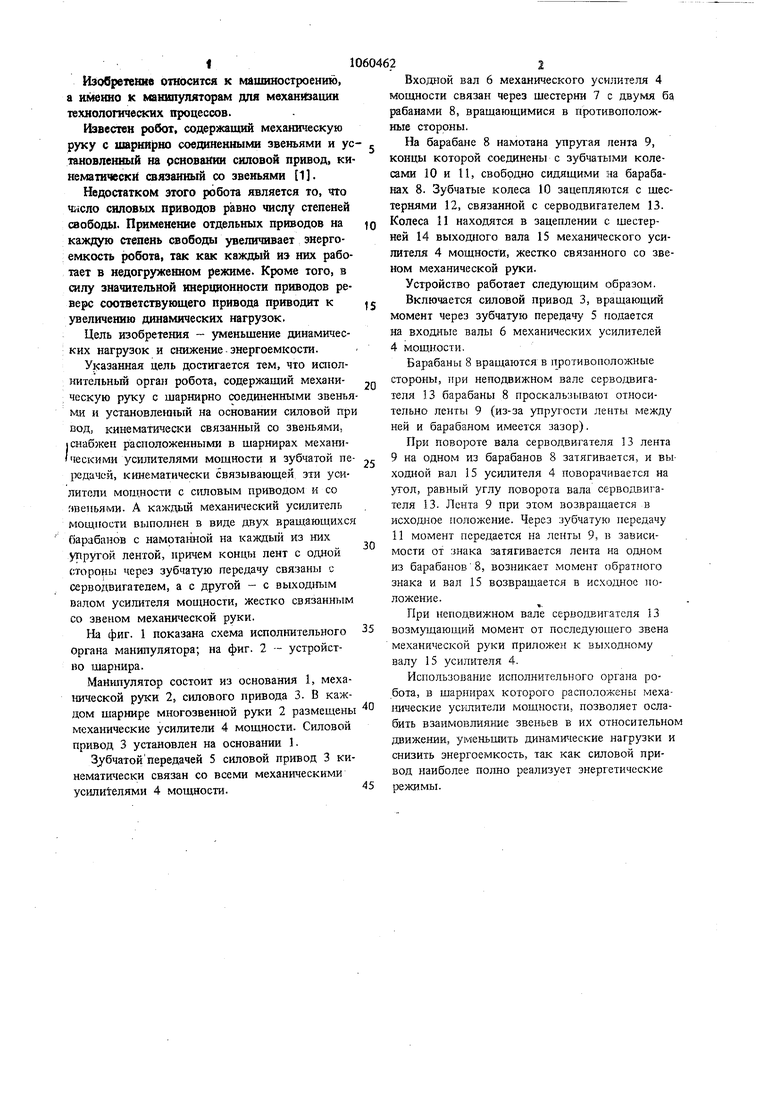
ю Изобретение относится к машиностроению, а именно к маштупяторам для механизации технологических процессов. Известен робот, содержащий механическую руку с шарннрно соединенными звеньями и ус тановленный на основании силовой привод, ки нематическН связанный со звеньями 1 . Недостатком этого робота является то, что силовых приводов равно числу степеней свободы. Применение отдельных приводов на каждую степень свободы увеличивает энергоемкость робота, так как каждый из них работает в недогруженном режиме. Кроме того, в силу значительной инерционности приводов реверс соответствующего привода приводит к увеличению динамических нагрузок. Цель изобретения - уменьшение динамических нагрузок и С1шжение энергоемкости. Указанная цель достигается тем, что исполнительный орган робота, содержащий механическую руку с шарнирно соединенными звенъя ми и установленный на основании силовой при вод, кинематически связанный со звеньями, I снабжен расположенными в шарнирах механическими усилителями мощности и зубчатой пе 1тедачей, кинематически связывающей, эти усилители мощности с сютовым приводом и со гшеньями. А каждый механический усилитель мощности выполнен в виде двух вращающихся барабанов с намотанной на кажць1Й из них упругой лентой, причем концы лент с одной CTopo ibi через зубчатую передачу связаны с серводвигателем, а с другой - с выходным йалом усилителя мощности, жестко связанным со звеном механической руки. На фиг. 1 показана схема исполнительного органа манипулятора; на фиг. 2 - устройство щарнира. Манипулятор состоит из основания 1, механической руки 2, силового привода 3. В каждом щарнире многозвенной руки 2 размещены механические усилители 4 мощности. Силовой привод 3 установлен на основании 1. Зубчатойпередачей 5 силовой привод 3 кинематически связан со всеми механическими усили1елями 4 мощности. Входной вал 6 механического усилителя 4 мощности связан через щестерни 7 с двумя ба ртбанами 8, вращающимися в противоположные стороны. На барабане 8 намотана упругая лента 9, концы которой соединены с зубчатыми колесами 10 и 11, свободно сидящими на барабанах 8. Зубчатые колеса 10 зацепляются с щестернями 12, связанной с серводвигателем 13. Колеса II находятся в зацеплении с щестерней 14 выходного вала 15 механического усилителя 4 мощности, жестко связанного со звеном механической руки. Устройство работает следующим образом. Включается силовой привод 3, вращающий момент через зубчатую передачу 5 подается на входные валы 6 механических усилителей 4 мощности. Барабаны 8 вращаются в противоположные стороны, при неподвижном вале серводвигателя 13 барабаны 8 проскальзывают относительно ленты 9 (из-за упругости ленты между ней и барабаном имеется зазор). При повороте вала серводвигателя 13 лента 9 на одном из барабанов 8 затягивается, и выходной вал 15 усилителя 4 поворачивается на угол, равный углу поворота вала серводвигателя 13. Лента 9 при этом возвращается в исходное положение. Через зубчатую передачу 11 момент передается на ленты 9, в зависимости от знака затягивается лента на одном из барабанов8, возникает момент обратного знака и вал 15 возвращается в исходное положение. При неподвижном вале серводвигателя 13 возмущающий момент от последующего звена механической руки приложен к выходному валу 15 усилителя 4. Использование исполнительного органа робота, в шарнирах которого расположены меха1шческие усилители мощности, позволяет ослабить взаимовлияние звеньев в их относительном движении, уменьшить динамические нагрузки и снизить энергоемкость, так как силовой привод наиболее полно реализует энергетические режимы.
///
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1177149A1 |
| Манипулятор | 1974 |
|
SU570482A1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Механическая рука | 1986 |
|
SU1323378A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Механический усилитель мощности | 1974 |
|
SU551470A1 |
| Привод робота | 1977 |
|
SU624788A1 |
1. ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА, содержащий механическую руку с шарнирно соединенными звеньями и установленный Ал основании силовой привод, кинематически связанный со звеньями, отличающийс я тем, что, с целью уменьшения динамических нагрузок и снижения энергоемкости, он снабжен расположенными в шарнирах механическими усилителями мощности и зубчатой передачей, кинематически связывающей эти усилители мощности с силовым приводом и со звеньями. 2. Орган робота по п. 1,отличающийся тем, что каждый механический усилитель мощности выполнен в виде двух вращающихся барабанов с намотанной на каждый из них упругой лентой, причем концы лент с одной стороны через зубчатую передачу связаны с серводвигателем, а с другой - с выходным валом усилителя мощности, жестко связанным со звеном механической руки. SS (Л с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
