двинут до отказа, при этом робот обладает наибольшей точностью.
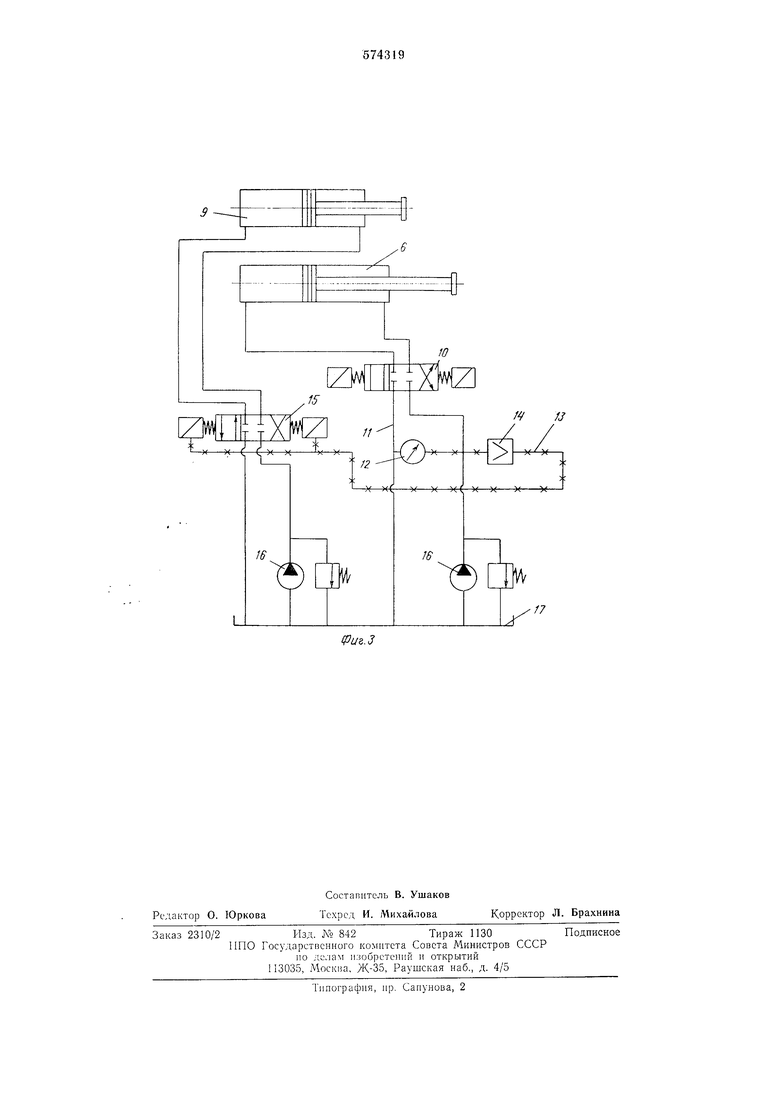
Если при обучении перемещать охват со значительной скоростью, расход из полости цилиндра 6 увеличивается. Сигнал об увеличении расхода попадает на золотник 15 и дается команда на перемещение Н1тока пилиндра 9 но направлению к оси поворота звена 3. При этом возрастает скорость перемещения звена 3.
Формула изобретения
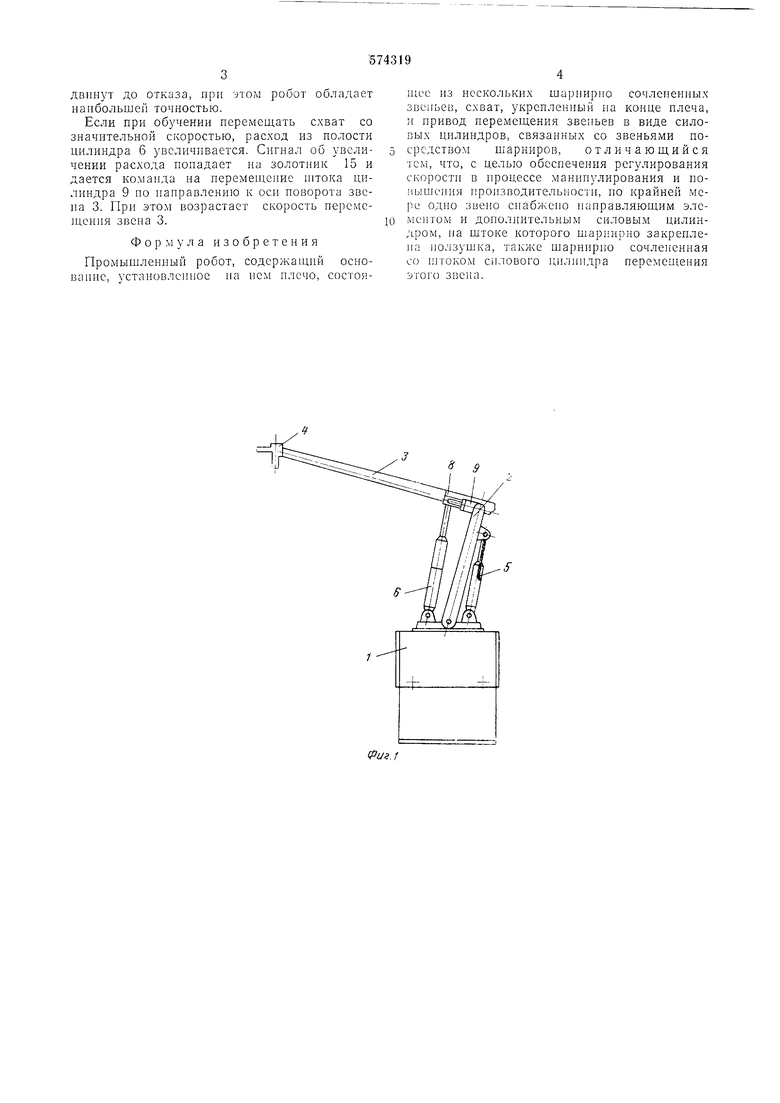
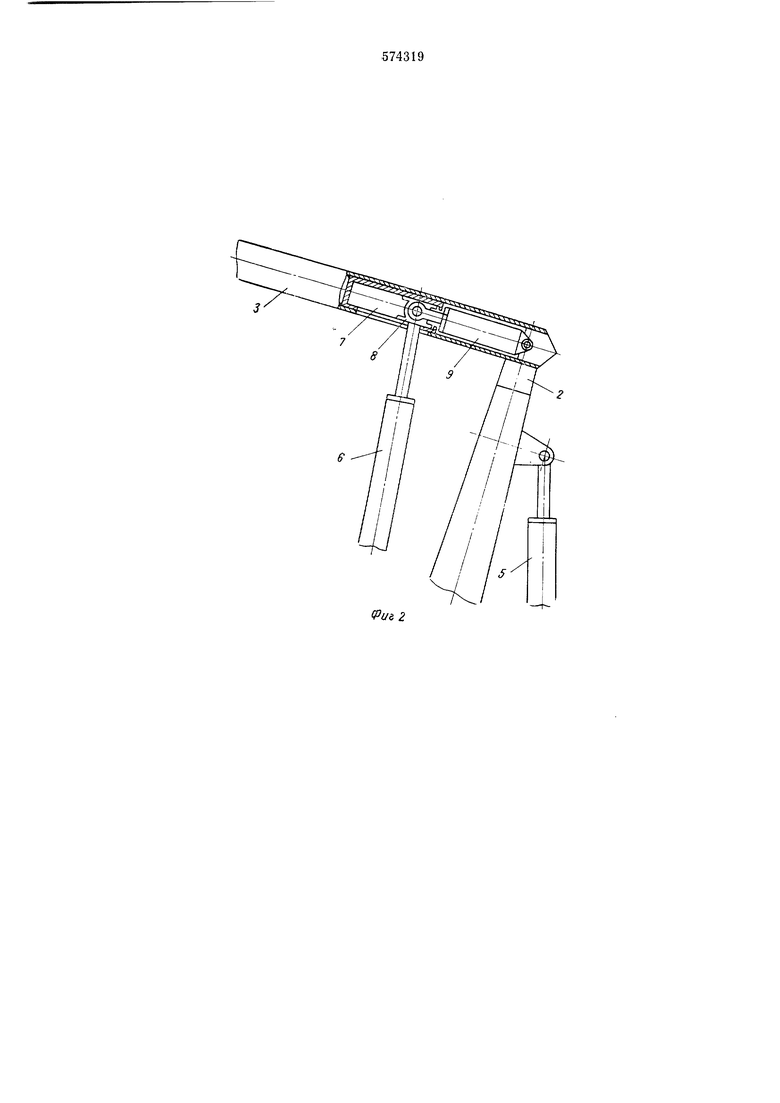
Промышленный робот, содержащий основание, установленное на нем нлечо, состоящее из нескольких шарнирно сочлененных звеньев, схват, укрепленный на конце плеча, и привод перемещения звеньев в виде силовых цилиндров, связанных со звеньями посрсдством шарниров, отличающийся тем, что, с целью обеспечения регулирования скороетн в процессе манипулирования и по.ышения пронзводительноети, по крайней .ме|ie одно звено снабжено направляющим элементом и дополнительньиг силовым цилиндром, иа штоке которого mapin-ipHO закреплена нолзушка, также шарнирно сочлененная со HJTOKOM силового цилиндра перемен1ения этого звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1161372A1 |
| Промышленный робот | 1979 |
|
SU848349A1 |
| Промышленный робот | 1975 |
|
SU597327A3 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1984 |
|
RU1304292C |
| Механическая рука | 1978 |
|
SU715316A1 |
| Устройство для испытания поршневых цилиндров | 1980 |
|
SU1154496A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
9
/7
