- 1 ; 1 Изобретение касается машиностроения, в частности роботов и манипуляторов с сочленениями механической руки в виде параллелограмма. Цель изобретения - улучшение динамических характеристик манипулятора за счет упрощения конструкции привода перемещения механической рук Цель достигается тем, что в манипуляторе, содержащем основание, механическую руку в виде последователь но и шарнирно связанных межл,у собой через промежуточное звено параллелограммов, привод перемещения и управляющий рьтааг /привод перемещения механической руки выполнен в виде силового цилиндра, с закрепленным на его штоке кулачком, установленным с возможностью взаимодействия с управляющим рычагом, а последний одним концом шарнирно смонтирован на основании и подпружинен, а другим концом шарнирно связан со звеном конечного параллелограмма .1еханической руки, при этом шток силового цилиндра щарнирно Связан со звеном др угого .параллелограмма механической руки. На чертеже представлена кинематическая схема предлагаемого манипулятора. Манипулятор включает в себя основание 1, силовой цилиндр привода 2 механической руки и регулируемый кулачок 3, установленный на его штоке. Конечньй параллелограмм руки состоит из рычагов 4 и 5, а предыдущий Из рычагов 6 и 7. Последние шарнирно соединены с одной стороны с основанием 1, а с другой стороны - с проме 22 жуточным элементом 8, к которому также шарнирно подсоединены рычаги 4 и 5 переднего (конечного) параллело- грамма. Концевой элемент 9 шарнирно подсоединен к концам рычагов 4 и 5. Рычаг 5 имеет удлиненное плечо 10. Управление движением параллелограммов механической руки осуществляется с помощью подпружиненного управляющего рычага 11, одним концом шарнирно связанного с удлиненныь: плечом 10 рычага 5 переднего параллелограмма, а другим концом через пружину 12 с шарнирной опорой 13 основания. Манипулятор работает следующим образом. При подаче давления в силовой цилиндр привода 2 происходит поворот рычагов 6 и 7 параллелограмма и через промежуточньи элемент 8 получает перемещение передний параллелограмм. При этом одновременно происходит его разворот от воздействия управляющего рычага, причем строго определенное положение опоры 13 обеспечивает движение концевого элемента горизонтально и прямолинейно. В момент, касания кулачка 3 управляющего рьиага 11 происходит сжатие пружины 12, рычаг 11 удлиняется и через плечо 10 рычага 5 разворачивает передний параллелограмм в обратном направлении и вниз. При этом .в результате суммирования перемещений концевого элемента 9 от давления штока привода в горизонтальной плоскости и перемещения под действием кулачка происходит в-ертикальное движение элемента 9 вниз.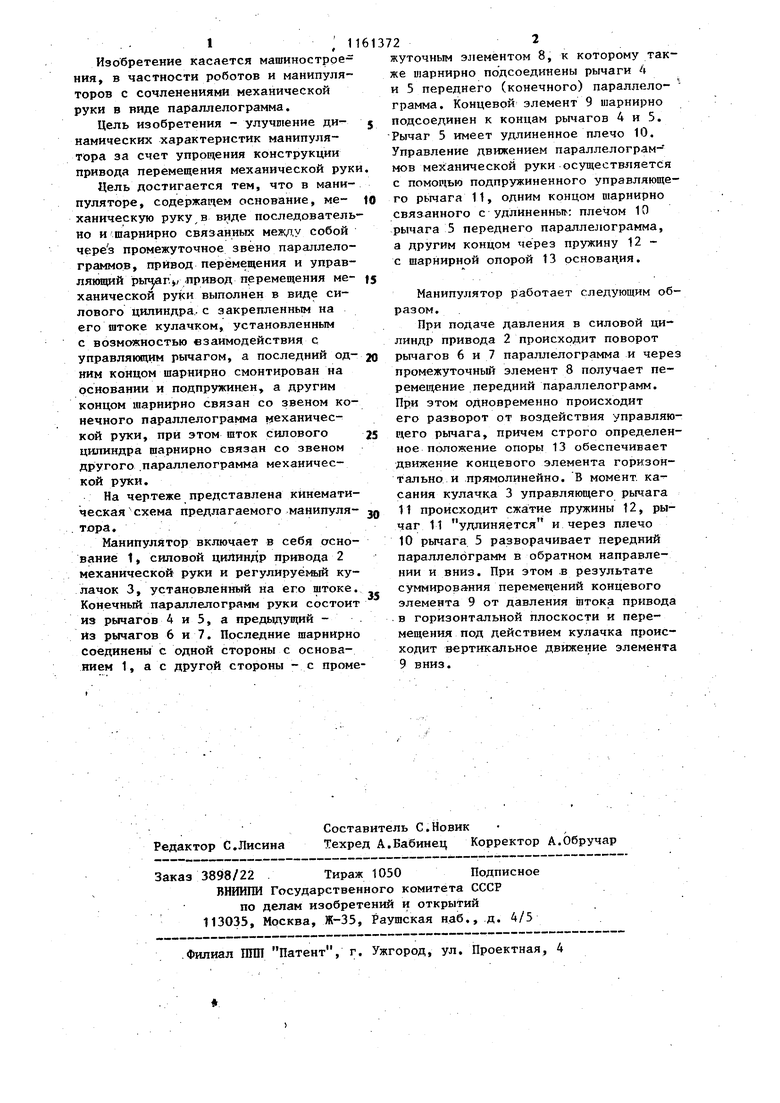
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1283087A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Комплекс для технического обслуживания автомобилей | 1986 |
|
SU1346468A1 |
| Манипулятор | 1985 |
|
SU1341015A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| Устройство для отделения от стопы и подачи в рабочую зону пресса плоской заготовки | 1982 |
|
SU1060278A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
МАНИПУЛЯТОР, содержащий основание, механическую руку в виде. последовательно и шарнирно связанных между собой через промежуточное звено параллелограммов, привод перемещения механической руки и управляющий рычаг, отличающимися тем, что, с целью улучшения динамических характеристик, привод вьшолнен в виде силового цилиндра с закрепленным на его штоке кулачком, установленным с возможностью взаимодействия с управляющим рычагом, а последний одним концом смонтирован шарнирно на основании и подпружинен, а другим концом шарнирно связан со звеном конечного параллелограмма механической руки, при этом шток силового цилиндра шарнирно связан со звеном другого параллелограмма механической руки. а
| Промышленный робот | 1977 |
|
SU623732A1 |
