из исполнительного электродвигателя 16, вал которого через редуктор 17 и пару коиических шестерен 18 соединен с валом регулирующего дросселя 8.
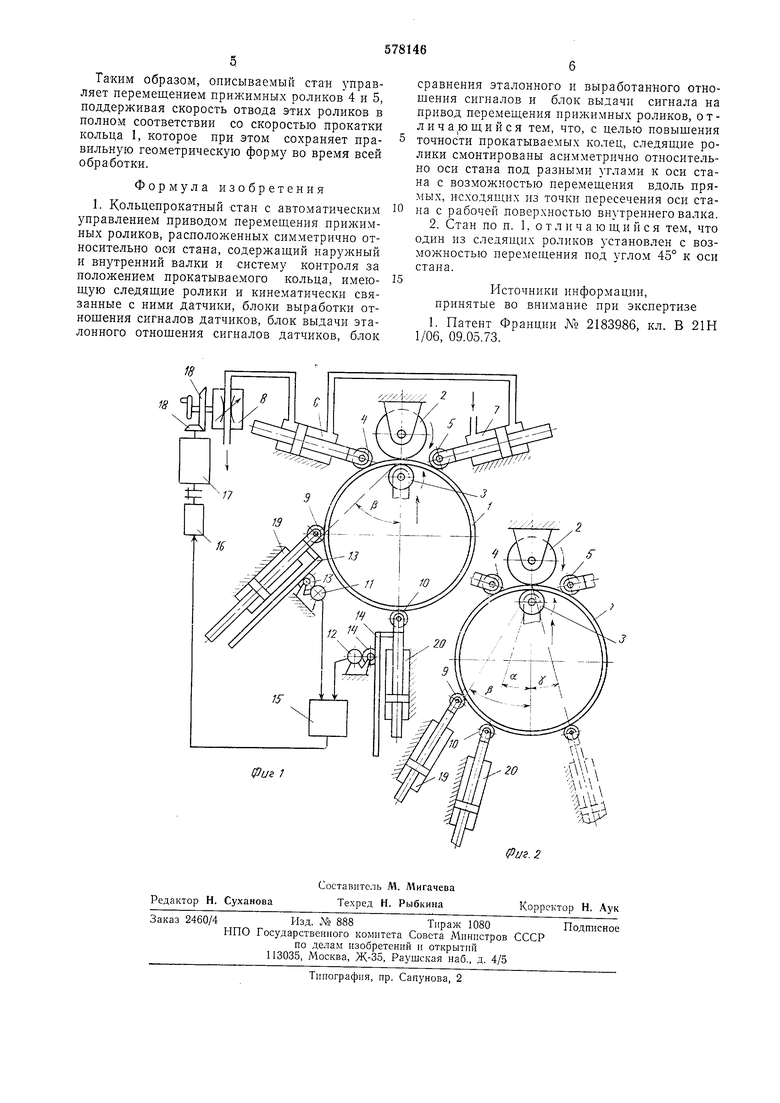
Следящие ролики 9 и 10 (фиг. 1 и 2) установлены асИлМметрично относительно оси раскатки. Каждый из этих роликов имеет возможность перемещения в направляющих, неподвижно 1смонтированных на станине стана. Этими наиравляющилми служат полости пневмо- или гидроцилиндров 19 « 20, на штоках которых закреплены следящие ролики 9 и 10 соответственно.
Направляющие роликов 9 и 10 (образующие и оси пневмо- или гидроцилиндров 19 и 20), параллельны линиям, соединяющим точки контактирования кольца 1 с прокатным 2 и соответствующего следящего 9 и 10 роликов.
В описываемом стане следящие ролики 9 и 10 могут быть установлены по одну сторону от оси стана (фиг. 2), но с возможностью перемещения под разными углами а и р к этой оси.
Следящие ролики 9 и 10 могут быть смонтированы асимметрично по разные стороны от оси стана (фиг. 2), если вместо ролика 10 использован ролик, имеющий возможность перемещения под углом 7 к этой оси (изобрал :ен пунктирными линиями).
Один из следящих роликов 10 (фиг. 1) быть установлен с возможностью перемещения вдоль оси стана.
На фиг. 1 показано, что следящий ролик 9 может быть смонтирован с возможностью перемещения под углом 45 к оси стана ((i - 45). При этом точка контактирования ролика 9 с кольцом 1 лежит на оси последнего, перпендикулярной к оси стана.
Следящий ролик 9 (фиг. 1 и 2), имеющий возможность перемещения под большим, чем следящий ролик 10, углом к оси стана (, а на фиг. 1 ), установлен по ту сторону этой оси, в которую направлено вращение кольца, проходящего между прокатными валками 2 и 3.
Принцип действия описываемого стана заключается в следующем.
В процессе прокатки кольца 1 скорость отвода прижимных роликов 4 и 5 регулируется автоматически при номощи следящих роликов 9 и 10. Если кольцо 1 при раскатке сохраняет правильную геометрическую форму, то отношение величин перемещения следящих роликов 9 и 10 является величиной постоянной и
,. ,,COSCX
равной /С
Перемещения следящих роликов 9 и 10 преобразуются в электрические сигналы, снимаемые с датчиков И и 12, каждый из которых через соответствующую передачу 13 или 14 типа «рейка-шестерня кинематически связан со своим роликом. Отношение сигналов пропорциональны величине К.
Конструктивно, например, выполнив передачи от следящих роликов 9 и 10 к датчикам 11
и 12 с различными передаточными числами и подобрав соответствующие схемы включения этих датчиков, можно получить равеиство снимаемых с них сигиалов при правильной геg ометрической форме кольца 1. В этом случае коэффициент пропорциональности сигналов равен единице.
Сигналы с датчиков И и 12 поступают в блок управления 15, который, сравнивая отношение сигналов с эталонным, вырабатывает питающее напряжение электродвигателя 16 привода системы управления перемещением прижимных роликов 4 и 5.
При равенстве отношения сигналов эталонному, когда кольцо 1 в процессе раскатки сохраняет правильную геометрическую форму, на выходе блока управления 15 напряжение отсутствует. Проходное сечение дросселя 8 остается постоянным. Прижимные ролики 4 и 5 отводятся с постоянной скоростью.
Бели скорость отвода прил ;имных роликов 4 и 5 стала меньше скорости раскатки кольца 1, то последнее вытягивается вдоль оси раскатки в неправильный овал. Нри этом от носительное перемещение следящего ролика 9 уменьшается, а следящего ролика 10 возрастает.
Соответственно изменяются сигналы датчиков 11 и 12. Отношение сигналов становится больше эталоиного, и блок управления 15 вырабатывает такое наиряжение, которое заставляет электродвигатель 16 вращать через редуктор 17 и пару конических шестерен 18 вал регулирующего дросселя 8 в сторону увеличения его проходного сечения. Слив из левой полости гидроцилиндра 6 возрастает, что ириводит к увеличению скорости отвода прижимных роликов 4 и 5.
Овальность кольца 1 уменьшается. Относительное перемещение следящих роликов выравнивается. Отношение сигиалов датчиков 11 и 12 уменьшается, приближаясь к эталоиному. Как только КОЛЬЦО i примет правильную гео„ метрическую форму, отношение сигналов ста новится равным эталоиному, напрял ение на выходе блока управления i5 исчезает, электродвигатель 16 остаиавливается, проходное сечение регулирующего дросселя 8 больше не
„ увеличивается, рост скорости отвода прижимных роликов 4 и 5 прекращается. Нрокатка кольца теперь происходит .при возросшей скорости отвода прижимных роликов 4 и 5, которая соответствует достигнутой скорости прокатки.
При уменьшении скорости прокатки по отношению к скорости отвода прижимных роликов 4 и 5 отношение сигнала с датчика 12 к сигналу с датчика 11 становится меньше эталонного. Блок управления 15 вырабатывает/ напряжение, которое заставляет электродвигатель 16 через редуктор 17 и коническую передачу 18 вращать вал регулируюшего дросселя 8 в сторону уменьшения проходного сечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кольцепрокатный стан | 1976 |
|
SU653010A1 |
| Устройство для автоматического управления перемещением прижимных роликов в кольцепрокатном стане | 1975 |
|
SU607628A1 |
| Кольцепрокатный стан | 1976 |
|
SU599898A1 |
| Устройство для автоматического изменения скорости перемещения опорных роликов в кольце-прокатного стана | 1975 |
|
SU596346A1 |
| Устройство для автоматического управления перемещением прижимного ролика в кольцепрокатном стане | 1973 |
|
SU471942A1 |
| КОЛЬЦЕРАСКАТНАЯ МАШИНА | 1969 |
|
SU242112A1 |
| КОЛЬЦЕРАСКАТНЫЙ АВТОМАТ И СПОСОБ ИЗГОТОВЛЕНИЯ БАНДАЖЕЙ | 1998 |
|
RU2139163C1 |
| СТАН ДЛЯ РАСКАТКИ ОСЕСИММЕТРИЧНЫХ ДЕТАЛЕЙ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2679033C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ПРИЖИМНОГО РОЛИКА В РАСКАТОЧНЫХ МАШИНАХ | 1967 |
|
SU214505A1 |
| УНИВЕРСАЛЬНЫЙ СТАН ХОЛОДНОЙ ПРОКАТКИ | 1997 |
|
RU2156173C2 |
