1
Изобретение относится к области кольценрокатного производства и может быть иснользовано для автоматизации кольцепрокатных станов.
Известен кольцепрокатный стан с симметричным расноложением центрирующего и следящего роликов относительно плоскости, нроходящей через продольные оси раскатных валков 1.
1реооВание монтажа центрирующего ролика в этом стане возмолшо ближе к раскатным валкам приводит к уменьщению чувствительности следящего ролика. Это снижает точность получаемых колец.
Другой известный кольценрокатный стан имеет два центрирующих ролика, размещенных симметрично указанной плоскости, в которой установлен следящий ролик 2.
Ввиду того, что отвод центрирующих роликов этого стана осуществляют без учета роста диаметра кольца, эти ролики деформируют ирокатываемое кольцо, превращая его в ненравильный овал и снижая точность прокатки.
Известен также кольцепрокатный стан с дополнительным следящим роликом, смонтированным на каретке 3. Каретка установлена на нанравляющих, расположенных параллельно плоскости, проходящей через продольные оси раскатных валков. Этот стан имеет механизм для согласования перемещения каретки
и осиовного следян;е)-о ролика. Датчики положения дополиительного следящего ролика связаны электрически с приводом перемещения центрирующих роликов.
В описанном стане датчики настроены на весь путь перемещения дополнительного следящего ролика и каретки, составляющий половину прироста диаметра прокатывае.мого кольца. Величина изменения сигнала датчиков на
единицу длины перемещения следящего ролика и каретки незначительна. Поэтому такая следящая система имеет низкую чувствительность, что отрицательно сказывается на точности нолучаемых на стане колец.
Целью изобретення является иовыщение точности прокатываемых колец.
Цель достигается тем, что кольцепрокатный стан, содержащщ установленные в станине внутренний и наружный раскатные валки, два
центрирующих ролика, размещенных симметрично относнтельно нлоскости, проходящей через продольиые оси валков, прпвод перемещения роликов, имеющий два силовых цилиндра, а также смонтнрованные на щтоках
силовых цилиидров два следящих ролика с датчиками их ноложения, связанными электрически с приводом иеремещения центрирующих роликов, снабжен двумя каретками, установленными в станине с возможностью неремещения иараллельно щтокам силовых цилипдров следящих роликов, при этом силовые цилиндры следящих роликов и их датчики соответствеиио устаиовлены на каретках.
Стан может быть снабжен механизмом для неремеи:,ения кареток, имеющим два силовых цилиндра со штоками, жестко закрепленными на станине, прн этом каждая каретка установлена на корнусе цилиндра.
В таком стане датчик положения одного следящего ролика может быть связан электрическн с приводом перемещения прижимных роликов, а датчик ноложения другого ролика связан электрически с механизмом перемещения кареток.
Этот стан может быть сиабжеи установленным в нлоскостн, проходящей через оси валкой, трет1)Им следящим и взаимодействующим с ним датчиком, электрически связанным с ириводом кареток.
Каждая каретка стана может быть кинематически связана с приводом перемещения одного из центрирующих роликов, при этом кинематическая связь может быть выполнена в внде кулисы, одним концом жестко закрепленной на штоке силового цилиндра центрирующего ролика, а другим взаимодействующей е кареткой.
Кроме того, кинематическая связь может быть выиолиеиа в виде рычага, жестко закреплеиного одннм концом на штоке цилиндра центрирующего ролика, и установленной на стаинне иолзушки, ири этом каретка шарнирио соединена с нолзушкой, а другой конец рычага шарннрно евязан с кареткой.
Кинематическая связь может быть вынолнена также в виде планки, одии коиец которой жестко закренлен на штоке цилиндра центрирующего ролика, а другой - жестко на каретке.
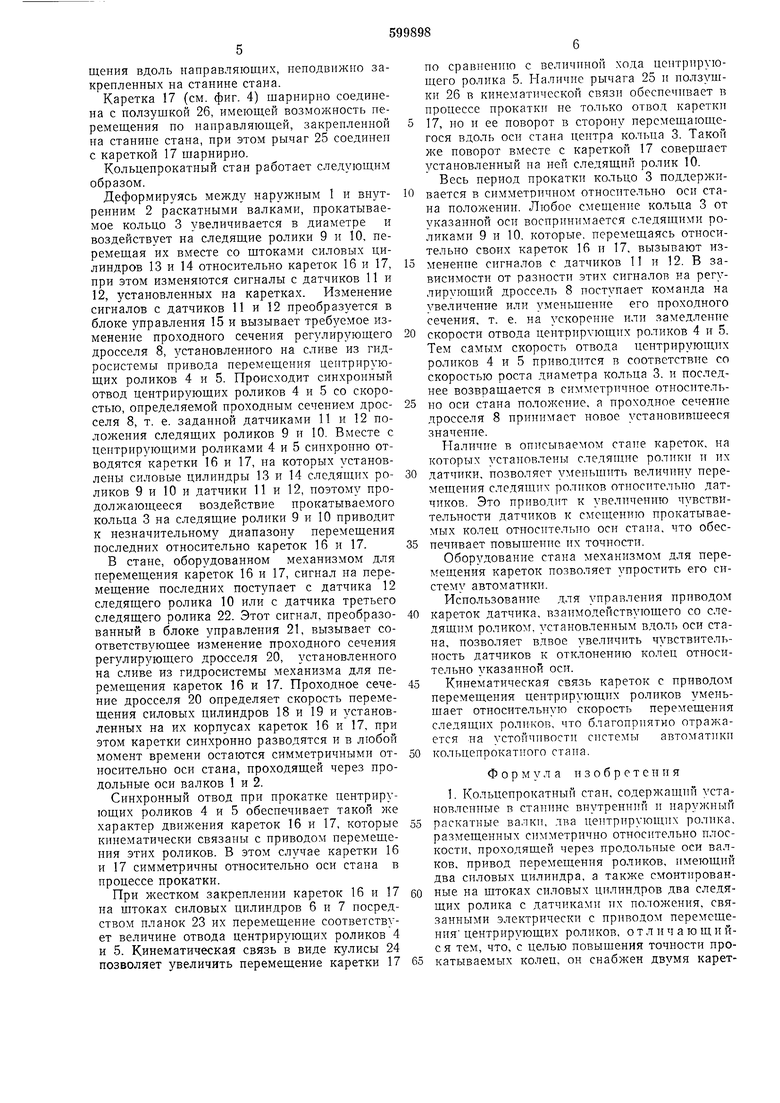
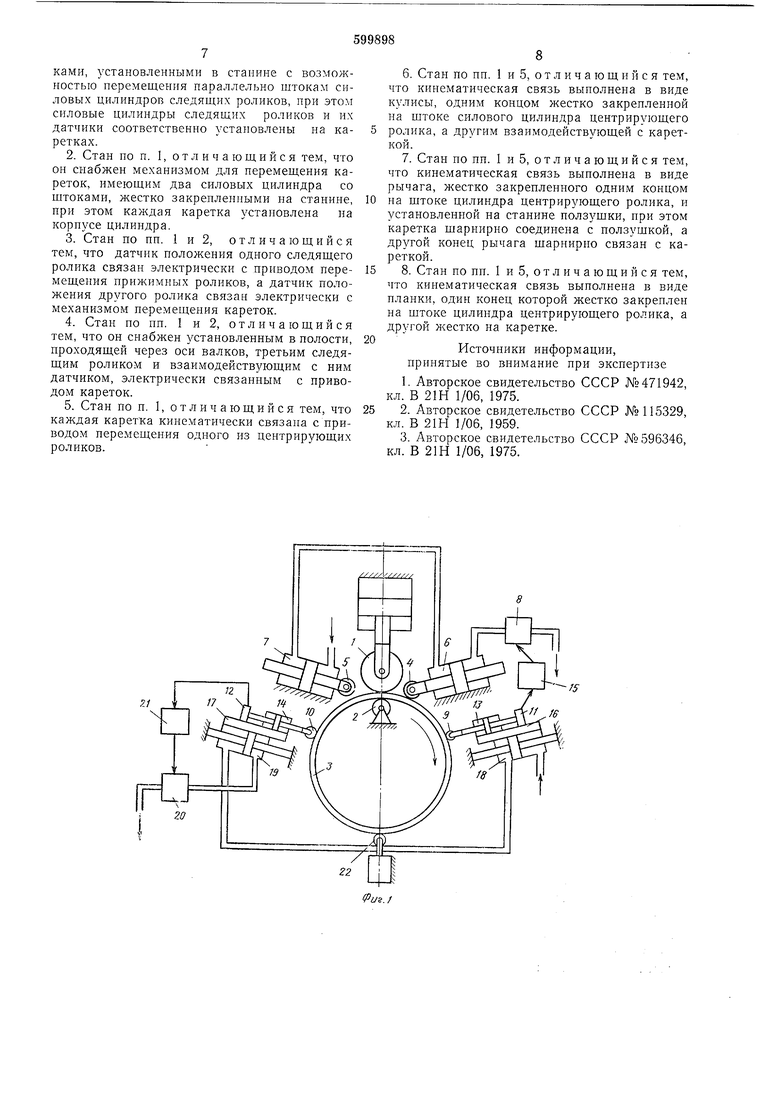
На фиг. 1 схематически изображен описываемый кольценрокатный стаи, оборздованный механизмом для перемещения кареток; на фиг. 2 - тот же стан, но с наличием кине.матической связи между каретками и приводом иеремещеиия цеитрнрующих роликов; иа фиг. 3 и 4 - различные виды кинематичеекой связи в этом стане.
Кольцепрокатный стан содержит установленные в станиие нарул ный 1 и внутренний 2 раскатные валки, между которыми помещено прокатываемое кольцо 3, и два центрирующих ролика 4 и 5, раеположепных симметричио относительно нлоскостн, нроходящей через продольные оси валков 1 и 2.
Привод неремещения центрирующих роликов 4 и 5 имеет два еиловых цилиндра 6 и 7, левые нолости которых соединены между еобой. Нагнетающая магистраль подключена к иравой иолости цилиндра 7, а на сливе из такой же полости цилиндра 6 установлен регулирующий дроссель 8.
Описываемый стан содержит два следящих ролика 9 и 10 и датчики 11 и 12 положения этих роликов. Следящие ролики 9 и 10 смонтированы на штоках силовых цилиндров 13
и 14 соответственно. Датчики 11 и 12 (иа фиг. 1 только датчик 11) связаны электрически с ириводом неремещення центрирующих роликов 4 н 5, нанрнмер нодключены через блок уиравления 15 к регулнрующему дросселю 8. Стан снабжен также двумя каретками 16 и 17, на которых установлены еиловые цилиндры 13 и 14 следящих роликов 9 и 10 и датчики 11 и 12 этих роликов. Каретки 16 и 17 устаиовлены в етанине стана с возможностью перемещения иараллельно штокам силовых цилиндров 13 и 14.
Следящие ролики 9 и 10 имеют ограниченный диаиазон неремещения относнтельно кареток 16 и 17 и своих датчиков 11 и 12. Это позволяет иовысить чувствительность следяHj,iix роликов к нзменению ноложения кольца 3 отиосительно нлоскостн, ироходящей через оси валков.
Для перемещения кареток 16 и 17 в стане (см. фиг. 1) имеется механизм, который содержит два силовых цилиндра 18 и 19. Левые нолости цилиндров 18 и 19 соединены между собой, к нравой нолости цилиндра 18 иодключена нагнетающая магистраль, а на сливе из такой же иолости цилиндра 19 установлен регулирующий дроссель 20. Штоки силовых цилиндров 18 и 19 жестко закреплены на станине стана, а каретки 16 и 17 установлены
па корнусах этих цилиндров.
Датчик 11 положения следящего ролика 9 электрически связан с приводом перемещения центрирующих роликов 4 и 5, как ноказано на фиг. 1. Нри этом датчик 12 ноложения второго следящего ролика 10 аналогичным образом связан с механизмом перемещения кареток 16 и 17. Он нодключен к регулирующему дросселю 20 указанного механизма через блок управления 21.
Описываемый стан снабжен третьим следящим роликом 22 и взаимодействующим с ним датчиком (иа чертежах не показан). Ролик 22 установлен в плоскости, нроходящей через оси валков 1 и 2. В этом случае датчик следящего ролика 22 иодключеи к регулирующему дросселю 20 привода кареток 16 и 17 через блок унравления 21, а датчики 11 и 12 подключены к дросселю 8 привода центрирующих роликов 4 и 5 через блок унравления 15,
как ноказано на фиг. 2.
В предлагаемом кольцепрокатном стане каждая каретка кинематически связана с соответствующим центрирующим роликом 4 или 5, нричем кинематическая связь может быть
выполнена в виде нлаики 23 (см. фиг. 2), кулисы 24 (см. фиг. 3) или рычага 25 (см. фиг. 4), один конец которых жестко закреплен на штоке соответствующего силового цилиндра 6 или 7 цеитрирующего ролика 4 или
5. Другой конец планки жестко закренлен на соответствующей каретке 16 или 17, на которой установлен еледящий ролик 9 или 10 и его датчик 11 или 12.
Кулиса 24 взаимодействует с кареткой 17
(см. фиг. 3), имеющей возможность перемещения вдоль направляющих, неподвижно закрепленных на станине стана.
Каретка 17 (см. фиг. 4) шарнирно соединена с нолзушкой 26, имеющей возможность перемещения но направляющей, закрепленной на станине стана, при этом рычаг 25 соединен с кареткой 17 щарннрно.
Кольцепрокатный стан работает следующим образом.
Деформируясь между наружным 1 н внутренним 2 раскатными валками, нрокатываемое кольцо 3 увеличивается в диаметре н воздействует на следящие ролики 9 и 10, перемещая их вместе со щтоками силовых цилиндров 13 и 14 относительно кареток 16 и 17, при этом изменяются сигналы с датчиков 11 н 12, установленных на каретках. Изменение сигналов с датчиков И и 12 преобразуется в блоке управления 15 и вызывает требуемое изменение проходного сечения регулирующего дросселя 8, остановленного на сливе из гидросистемы привода перемещения центрирующих роликов 4 н 5. Происходит синхронный отвод центрнрующнх роликов 4 и 5 со скоростью, определяемой проходным сеченнем дросселя 8, т. е. заданной датчиками И и 12 положения следящих роликов 9 и 10. Вместе с центрирующими роликами 4 и 5 синхронно отводятся каретки 16 и 17, на которых установлены силовые цилиндры 13 н 14 следящих роликов 9 и 10 и датчики 11 и 12, поэтому продолжающееся воздействие прокатываемого кольца 3 на следящие ролики 9 н 10 приводит к незначительному диапазону перемещения последних относительно кареток 16 н 17.
В стане, оборудованном механизмом для перемещения кареток 16 и 17, сигнал на перемещение последних поступает с датчика 12 следящего ролика 10 или с датчика третьего следящего ролика 22. Этот сигнал, преобразованный в блоке унравлення 21, вызывает соответствующее изменение проходного сечения регулирующего дросселя 20, установленного на сливе из гидросистемы механизма для неремещения кареток 16 и 17. Проходное сечение дросселя 20 определяет скорость перемещения силовых цилиндров 18 и 19 н установленных на их корпусах кареток 16 и 17, при этом каретки синхронно разводятся и в любой момент времени остаются симметричными относительно оси стана, проходящей через продольные оси валков 1 и 2.
Синхронный отвод при нрокатке центрирующих роликов 4 и 5 обеспечивает такой же характер движения кареток 16 н 17, которые кинематически связаны с приводом перемещения этих роликов. В этом случае каретки 16 и 17 симметричны относительно оси стана в процессе прокатки.
При жестком закреплении кареток 16 и 17 на щтоках силовых цилиндров 6 н 7 посредством нланок 23 их неремещенне соответствует величине отвода центрирующих роликов 4 и 5. Кинематическая связь в виде кулисы 24 нозволяет увеличить перемещение каретки 17
по сравнению с величиной хода центрирующего ролика 5. Наличие рычага 25 н ползущки 26 в кинематической связи обеспечивает в процессе прокаткн не только отвод каретки 17, но и ее поворот в сторону перемещающегося вдоль осн стана центра кольца 3. Такой же поворот вместе с кареткой 17 соверщает установленный па ней следящнй ролик 10. Весь период прокаткн кольцо 3 поддерживается в симметричном отност1тельно оси стана положении. Любое смещение кольца 3 от указанной оси воспринимается следящими роликами 9 и 10. которые, перемещаясь относительно своих кареток 16 и 17, вызывают измененне снгналов с датчиков 11 и 12. В зависимости от разности этих сигналов на регулирующий дроссель 8 поступает команда на увеличение или уменьщение его проходного сечения, т. е. на ускорение или замедлентте
скорости отвода центрирующих роликов 4 и 5. Тем самым скорость отвода центрнрующнх роликов 4 и 5 приводится в соответствие со скоростью роста диаметра кольца 3. и цоследнее возвращается в симметрттчное относительно оси стана положение, а проходное сечение дросселя 8 принимает новое установнвщееся значение.
Наличие в описываемом стане кареток, на которых установлены следяндне ролики тт нх
датчики, нозволяет уменьшить величину перемещения следящих роликов относительно датчиков. Это приводит к увеличению чувствительности датчиков к смещению нрокатываемьтх колец относительно осн стана, что обеспечивает повыщенне нх точности.
Оборудование стана механизмом для перемещения кареток позволяет упростить его систему автоматики.
Использование для управления приводом
кареток датчика, взанмодействующего со следящим роликом, установленным вдоль осн стана, нозволяет вдвое увелнчнть чувствительность датчиков к отклонению колец относительно указанной оси.
Кинематическая связь кареток с нриводом перемещения центрирующих роликов уменьщает относительную скорость перемещения следящих роликов, что благоприятно отражается на устойчивости системы aвтo тaтнки
кольцепрокатиого стана.
Формула изобретения
1. Кольценрокатный стан, содержащий установленные в станине внутренний н наружный
раскатные валки, лва центрнрующнх ролика, размещенных симметрично относительно плоскости, проходящей через продольные оси ва,чков, привод перемещения роликов, имеющий два силовых цилиндра, а также смонтпрованные на щтоках силовых цилиндров два следящих ролика с датчиками их положения, связанными электрически с нриводом перемещения центрирующих роликов, о т л и ч а ю щ и йс я тем, что, с целью повышения точности нрокатываемых колен, он снабжен двумя карет7
ками, установленными в станине с возможностью перемещения параллельно штокам силовых цилиндров следящих роликов, нри этом силовые цилиндры следящих роликов и их датчики соответственно установлены на каретках.
2.Стан но п. 1, отлнчающийея тем, что он снабжен механизмом для перемещения кареток, имеющим два силовых цилиндра со щтоками, жестко закрепленными на станине, при этом каждая каретка установлена на корнусе цилиндра.
3.Стан по нп. 1 н 2, отличающийся тем, что датчик положения одного следящего ролика связан электрически с приводом перемещения прижимных роликов, а датчик положения другого ролика связан электрически с механизмом неремещения кареток.
4.Стан по пп. 1 и 2, отличающийся тем, что он снабжен установленным в полости, проходящей через оси валков, третьим следящим роликом и взаимодействз ющим с ним датчиком, электрически связанным с приводом кареток.
5.Стан но п. 1, отличающийся тем, что каждая каретка кинематически связана с приводом перемещения одного из центрирующих роликов.
8
6.Стан по пп. 1 и 5, о т л и ч а ю щ и и с я тем, что кинематическая связь выполнена в виде кулисы, одним концом жестко закрепленной на щтоке силового цилиндра центрирующего ролика, а другим взаимодействующей с кареткой.
7.Стан по пп. 1 и 5, о т л и ч а ю щ и и с я тем, что кинематическая связь выполнена в виде рычага, жестко закрепленного одним концом на щтоке цилиндра центрирующего ролика, и установленной па станине ползущий, нри этом каретка щарнирно соединена с ползущкой, а дрЗтой конец рычага щарнирно связан с кареткой.
8.Стан по пп. 1 и 5, о т л и ч а ю щ и и с я тем, что кинематическая связь выполнена в виде планки, один конец которой жестко закреплен на щтоке цилиндра центрирующего ролика, а другой жестко на каретке.
Источники информации, принятые во внимание при экспертизе
1 Авторское свидетельство СССР №471942, кл. В 21Н 1/06, 1975.
2.Авторское свидетельство СССР №115329, кл. В 21Н 1/06, 1959.
3.Авторское свидетельство СССР №596346, кл. В 21Н 1/06, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кольцепрокатный стан | 1976 |
|
SU653010A1 |
| Устройство для автоматического управления перемещением прижимных роликов в кольцепрокатном стане | 1975 |
|
SU607628A1 |
| Устройство для автоматического изменения скорости перемещения опорных роликов в кольце-прокатного стана | 1975 |
|
SU596346A1 |
| Кольцепрокатный стан | 1973 |
|
SU650485A3 |
| Кольцепрокатный стан | 1973 |
|
SU936796A3 |
| Отключающее устройство к кольцепрокатному стану | 1984 |
|
SU1191158A1 |
| Многопозиционный кольцепрокатный стан | 1977 |
|
SU660758A1 |
| КОЛЬЦЕРАСКАТНЫЙ АВТОМАТ И СПОСОБ ИЗГОТОВЛЕНИЯ БАНДАЖЕЙ | 1998 |
|
RU2139163C1 |
| Многопозиционный кольцераскатный стан | 1978 |
|
SU697234A1 |
| Стан для раскатки колец | 1983 |
|
SU1159700A1 |
21
J
