ри-фиксаторы 14, которые соединены с рычагом 15.
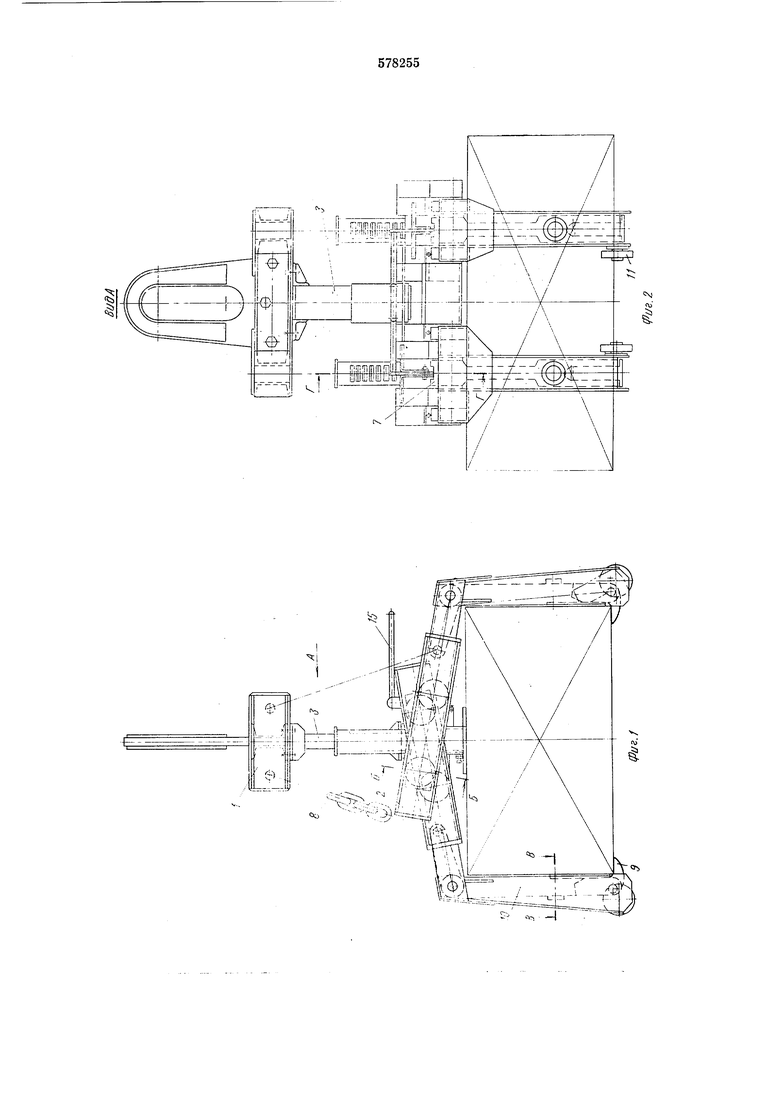
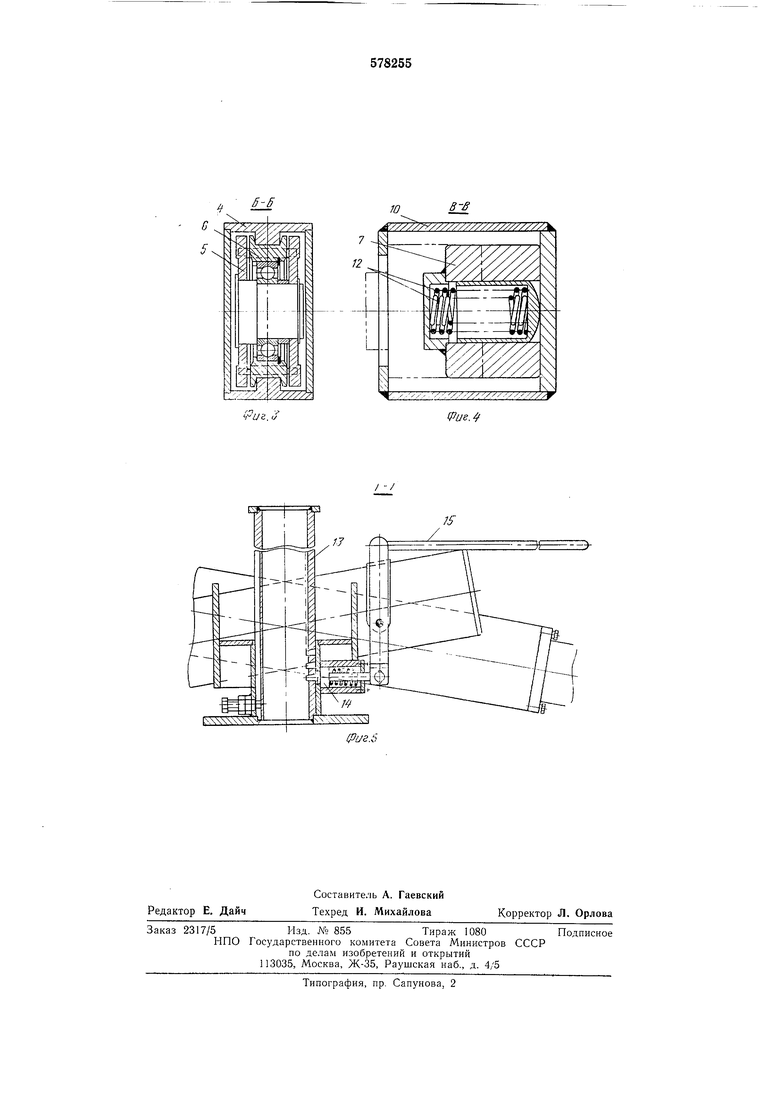
При опускании автоматического захвата на груз механизм фиксации в стойке 3 срабатывает либо от регулируемого по высоте упора 13 в случае захвата груза со штабеля, либо от контакта колес 11 кареток с полом пеха при захвате груза с пола. При подьеме траверсы относительно рамы тяговое усилие через цени 8 передается на короткие плечи рычагов 7. Каретки катятся по наклонным направляющим и сближаются на необходимую ширину пачки захватываемого груза. Когда 10 кареток упираются в груз, начинают деформироваться пружины буферов 12, двуплечие рычаги 7 разворачиваются и лапы 9 выходят из кожухов и заходят под пачку. Груз транспортируется для складирования или погрузки и опускается. Если он опускается па прокладки, то от контакта с ними ослабевает натяжение цепей 8, и лапы 9 убираются внутрь кожухов 10, так как двуплечие рычаги 7 разворачиваются пружинными буферами 12. Затем каретки 5 под действием собсгвеппого веса возвращаются по наклонным направляющим рамы 2 в исходное положение. При дальнейшем опускании траверсы относительно рамы происходит фиксация их положения между собой, и захват поджимается.
Регулируемые упоры 13 настраиваются на высоту пачки в контакте с яею. Для этого рычагом 15 подпружниенные штыри 14 извлекаются из отверстий упора и, поджимая или опуская захват, следят за тем, чтобы лапы зашли на пачку, и в этот момент рычаг 15 отпускается и упоры фиксируются штырями на определенную высоту. Колеса 11 кареток 5 служат для облегчения захвата пачки груза с пола цеха и для облегчения выемки траверсы из вагона, когда груз своей боковой стороной укладывается к борту.
Ф о р м у ;i а изобретения
Автоматический захват, содержащий траверсу и раму, связанные между собой механнзмом фиксации их взаимиого ноложения, на раме которого вынолнены наклонные наиравляющие, в которых с возможностью перемещения установлены соединенные гибкими тягами с траверсой каретки с захватными органами, выполненными в виде вертикальных стоек, отличающийся тем, что, с целью
обеспечеиия укладки груза без прокладок и уменьщения расстояния между грузами, вертикальные стойки вынолиены полыми, а на каретках шарнирно установлены двуплечие рычаги, одно из нлеч каждого из которых расноложено в полости стоек и снабжено шарпирно установленной в его нижней части неуравновешенной подхватной лапой, а другое плечо соедипено с гибкими тягами. Источники, информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР Л 219141, кл. В 66с, 27.08.68.
2.Авторское свидетельство СССР ,NO 254057, кл. В 66С 1/42, 26.05.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное устройство для длинномерных грузов | 1982 |
|
SU1094833A2 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Полуавтоматическая линия по первичной обработке кожсырья на операциях очистки от соли, взвешивания, визуального осмотра и укладки на стеллажи | 1960 |
|
SU134372A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Грузозахватное устройство | 1989 |
|
SU1678747A1 |
| ТРАВЕРСА ДЛЯ ЗАХВАТА ПАКЕТА ШПАЛ | 2008 |
|
RU2376235C1 |
| Автоматический захват для пакетов груза | 1983 |
|
SU1323514A1 |
щ : , - -
M, X Tl---- -да / .Mka
P .-.(P
-1
,
c:.. /
г x-i
Zl-17
-
Б-5
ч-uz.,;
В-
iPue.
ZE
IpL/S.S
