1
Изобретение относится к сельскохозяйственному машиностроению, а именно, к усгройствам для автоматического управления движением корнеклубнеуборочны х. машин.
Известно устройство для автоматического вождения корнеуборочной машины, вкл наюш.ее копирующие ш,упы, гидрозологник, гидроусилитель рулевого механизма, гидродилиндр рулевого управления и кран для переключения режима работы 11
Однако при работе такого устройства в автоматическом режиме гидроусилитель отключен от гидроцилиндра рулевого управления, и управление машины оперетором возможно только в случае переключения крана на ручное управление.
Известно также устройство для управления самоходной корнеуборочной машиной, , содержаш.ее датчик и отклонения кинемати чески связанные с гидрораспределителем и управляемыми колесами машины, гидроцилиндры ручной корректировки и рулевого управления, двухпо:аиционн гй гидравлически переключатель, гидроусилитель рулевого
управления, гидронасос с масляным бакцм и гидропроводы, в котором в режиме автоматического вождения масло от насоса подводится к двухпозиционному переключателю, гидрозолотнику и на слив | 2 j .
В этом устройстве для корректировки движения машины оператору необходимо приложить на рулевое колесо гидроусилителя рулевого управления усилие, значительн превышаюшее рабочее. Кроме того, в гид- роцилиндре ручной корректировки скапливается воздух, что приводит к потере устрйчивости работы следяшей системы управления.
Цель изобретения - повышение эффективности управлр}1ия.
Это достигается тем, что гидроусилител рулевого управления соединён нагнетательным каналом с гидронасосом, а сливным каналом - с гидрораспределителем.
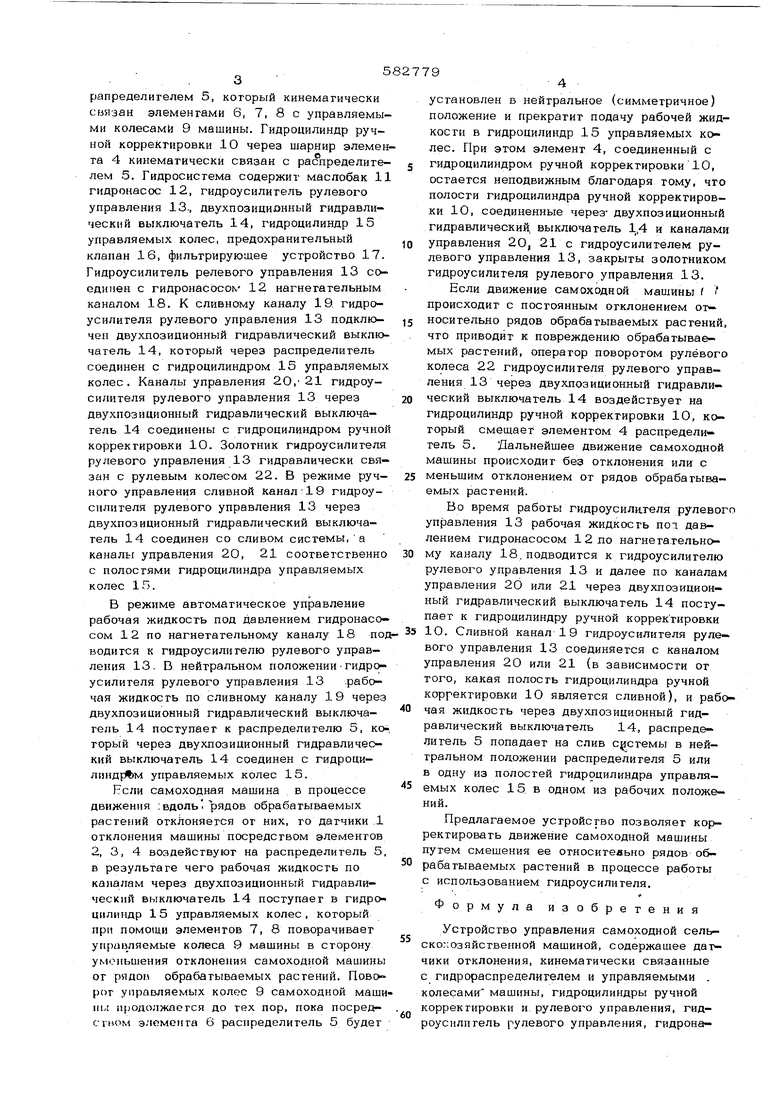
На чертеже представлена схема предлагаемого устройства в режиме автоматического управления.
Датчики 1 отклонения машины кинематически связаны элементами 2, 3, 4 с рапределителем 5, который кинематически связан элементами 6, 7, 8 с управляемыми колесами 9 машины. Гидроцилиндр ручной корректировки 10 через шарнир элемен та 4 кинематически связан с распределителем 5. Гидросистема содержит маслобак 1 гидро 1асос 12, гидроусилитель рулевого управления 13., двухпозициоиньШ гидравлический выключатель 14, гидроцилиндр 15 управляемых колес, предохранительный клапан 16, фильтрирующее устройство 17. Гидроусилитель ролевого управления 13 соединен с гидронасосом 12 нагнетательным каналом 18. К сливному каналу 19. гидроусилителя рулевого управления 13 подключен двухпозиционный гидравлический выклю чатель 14, который через распределитель соединен с гидроцилиндром 15 управляемых колес. Каналы управления 20,21 гидроусилителя рулевого управления 13 через двухпозиционный гидравлический выключатель 14 соединены с гидроцилиндром ручно корректировки 10. Золотник гидроусилителя рулевого управления 13 гидравлически связан с рулевым колесом 22. В режиме ручного управления сливной канал19 гидроусилителя рулевого управления 13 через двухпозиционный гидравлический выключатель 14 соединен со сливом системы, а каналы управления 20, 21 соответственно с полостями гидроцилиндра управляемых колес 13. В режиме автоматическое управление рабочая жидкость под давлением гидронасосом 12 по нагнетательному каналу 18 по водится к гидроусилителю рулевого управления 13. В нейтральном положении гидроусилителя рулевого управления 13 .рабочая жидкость по сливному каналу 19 через двухпозиционный гидравлический выключатель 14 поступает к распределителю 5, ко торый через двухпозиционный гидравлический выключатель 14 соединен с гидроцилиндрЛм управляемых колес 15. Рели самоходная машина в процессе движения : вдоль Урядов обрабатываемых растений отклоняется от них, то датчики .1 отклонения машины посредством элементов 2, 3, 4 воздействуют на распределитель 5 в результате чего рабочая жидкость по каналам через двухпозиционный гидравлический выключатель 14 поступает в гидро цилиндр 15 управляемых колес , который при помощи элементов 7, 8 поворачивает уприиляемые колеса 9 машины в сторону уменьшения отклонения самоходной машины от рядом обрабатываемых растений. Пово рот управляемых колес 9 самоходной маши ны продолжается до тех пор, пока посредством элемента 6 распределитель 5 будет установлен в нейтральное (симметричное) положение и прекратит подачу рабочей жидкости в гидроцилиндр 15 управляемых колес. При этом элемент 4, соединенный с гидроцилиндром ручной корректировки 10, остается неподвижным благодаря тому, что полости гидроцилиндра ручной корректировки 10, соединенные через- двухпозиционный гидравлический, выключатель 1,4 и каналами управления 2О, 21 с гидроусилителем рулевого управления 13, закрыты золотником гидроусилителя рулевого управления 13. Если движение самоходной машины f происходит с постоянным отклонением от- носительно рядов обрабатываемых растений, что приводит к повреждению обрабатываемых растений, оператор поворотом рулевого колеса 22 гидроусилителя рулевого управления 13 через двухпозиционный гидравли- ческий выключатель 14 воздействует на гидроцилиндр ручной корректировки 10, который смещает элементом 4 распределитель 5. Дальнейшее движение самоходной машинь происходит без отклонения или с меньшим отклонением от рядов обрабатываемых растений. Во время работы гидроусилителя рулевого управления 13 рабочая жидкость noi давлением гидронасосом 12ло нагнета.тельному каналу 18, подводится к гидроусилителю рулевого управления 13 и далее по каналам управления 20 или 21 через двухпозицион- ный гидравлический выключатель 14 поступает к гидроцилиндру ручной корректировки 1О. Сливной канал 19 гидроусилителя рулевого управления 13 соединяется с каналом управления 20 или 21 (в зависимости от того, какая полость гидроцилиндра ручной корректировки 10 является сливной), и рабочая жидкость через двухпозиционный гидравлический выключатель 14, распределитель 5 попадает на слив системы в нейтральном положении распределителя 5 или в одну из полостей гидроцилиндра управля- емых колес 15 в одном из рабочих положений. Предлагаемое устройство позволяет корректировать движение самоходной машины путем смешения ее относительно рядов обрабатываемых растений в процессе работы с использованием гидроусилителя. Формула изобретения Устройство управления самоходной сельско;;озяйственной машиной, содержашее дат чики отклонения, кинематически связанные с гидрораспределителем и управляемыми . колесами машины, гидроцилиндры ручной корректировки и рулевого управления, гидроусилитель рулевого управления, гидрона-

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Устройство для автоматического управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1291038A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1976 |
|
SU548223A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1131737A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1676474A1 |
| Гидромеханическая система для автоматического и ручного управления самоходной сельскохозяйственной машиной по контрастному следу | 1984 |
|
SU1166689A1 |
| Система рулевого управления транспортного средства | 1980 |
|
SU872358A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ОБРАБОТКИ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 2015 |
|
RU2593251C1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1979 |
|
SU869594A1 |
| Гидравлическая система самоходной машины | 1984 |
|
SU1152848A1 |
