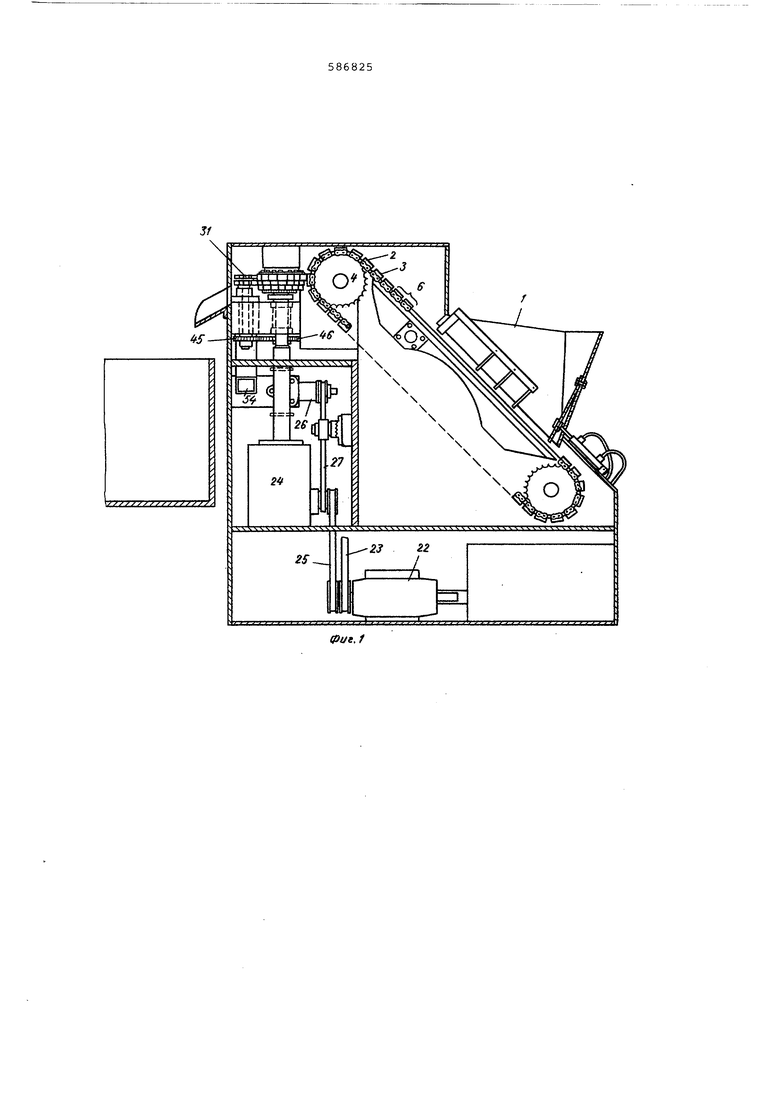
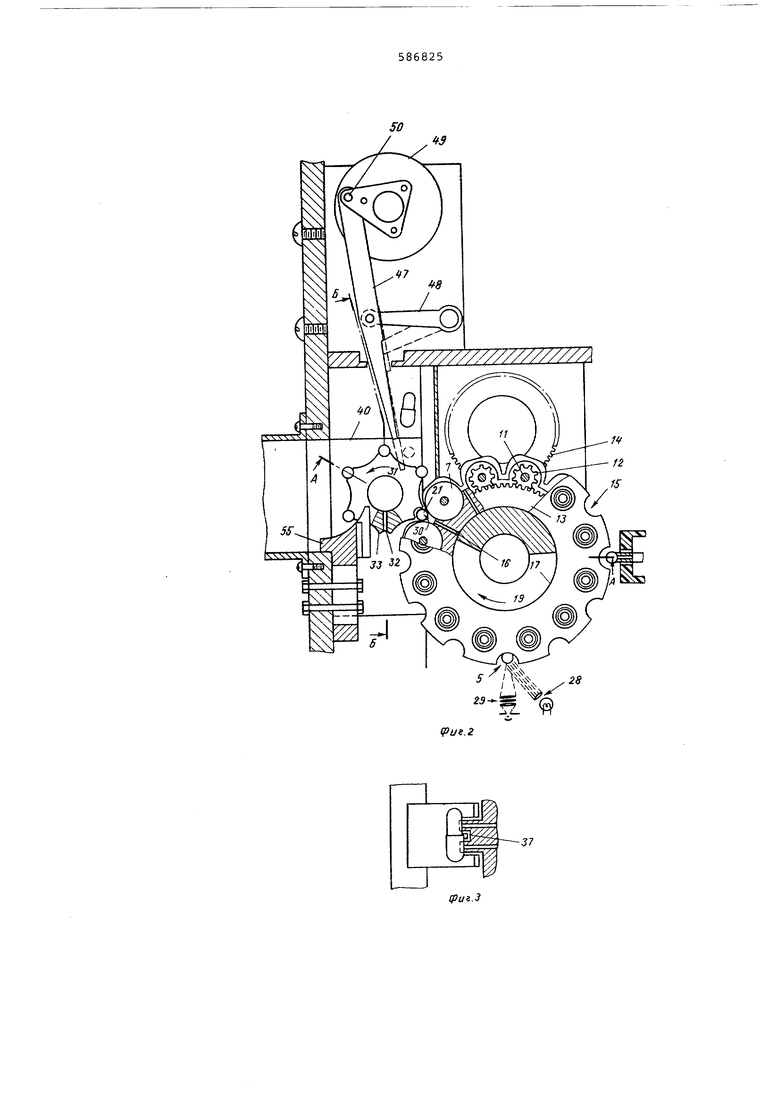
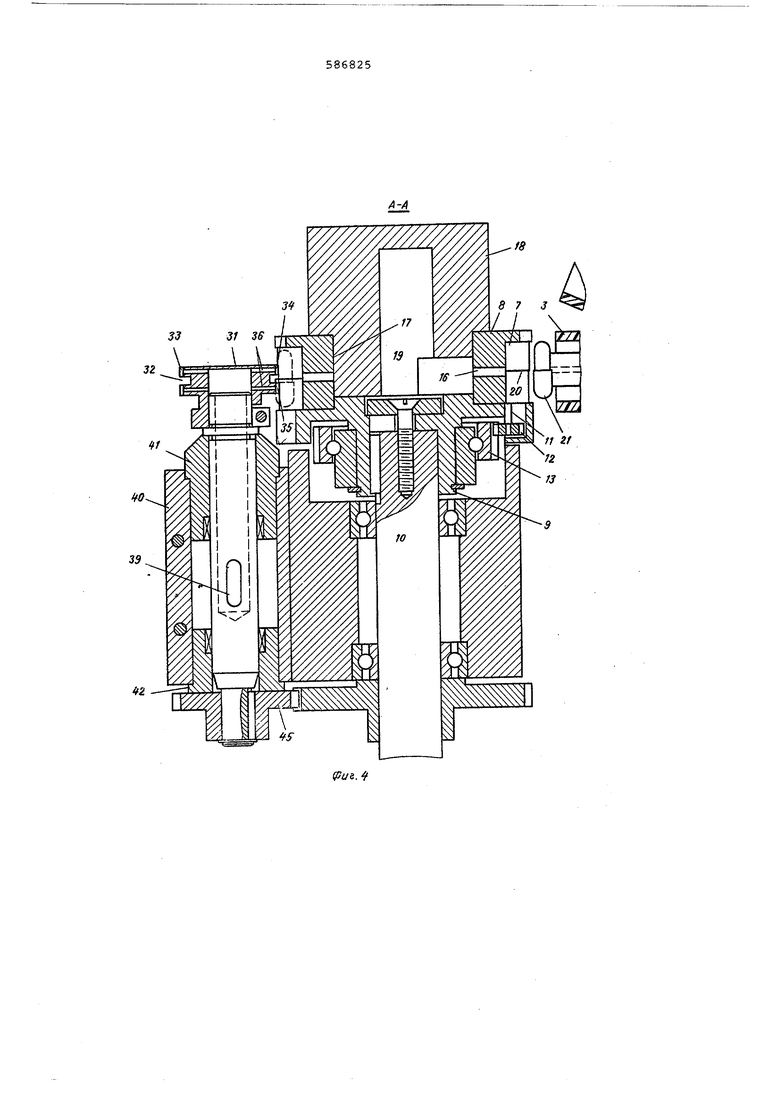
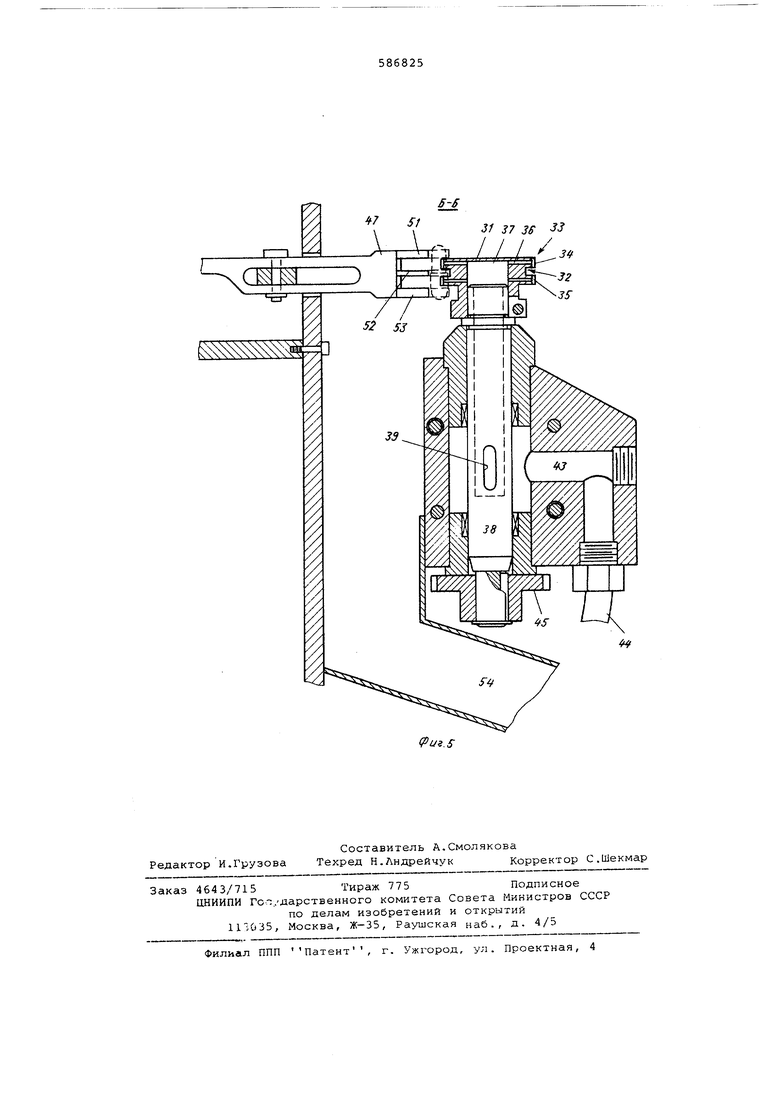
(54) АВТОМАТ ДЛЯ СОРТИРОВКИ КАПСУЛ, ИМЕЮЩИХ КОРПУС С НАДЕТЫМ НА НЕГО КОЛПАЧКОМ да из автомата качественных капсул; на-фиг.4 - разрез А-А на фиг.2; на фиг. 5 - разрез Б-Б на фиг.2. Автомат для сортировки капсул, им ющих корпус с надетым на него колпач ком, содержит загрузочное устройство с воронкой 1, транспортный ротор, выполненный в виде бесконечного цепног транспортера 2, несущего имеющие при сосы гнезда 3 для размещения капсу передаточное колесо 4 с пальцами, снабженными присосами (фиг. 4), измери.тельную станцию 5. На пути движения бесконечного транспортера 2 в верхней его части установлен механизм 6 для одинаковой ориентации капсул перед поступлением их на передаточное колесо 4, с которого капсулы попадаю на измерительную станцию 5. Измерительная, станция 5 состоит из ряда вращающихся роликов 7, которые расположены по периферии диска-носител 8 (фиг.2 и 4), имеющего ступицу 9, смонтированную на главном валу 10 автомата. Каждый ролик 7 закреплен на валике 11, который своим нижним концом соединен с зубчатым колесом Зубчатые колеса 12 всех валиков кин матически связаны с зубчатым колесом 13 с внутренним зауеплением, а зубчатое колесо 13 - с непрерывно вращающимся ведущим зубчатым колесом 14, смонтированным на валу 10. Каждая пара роликов 7 образует гнездо 15 для приема капсулы, приче дно каждого гнезда сообщается с воз душным канадом 16, связанным с поло стью 17 в диске-носителе 8. В полост 17 размещен кланан 18, образующий вакуумную камеру 19. Каждый ролик 7 снабжен заплечиками 20 (фиг.4), в ре зультате его верхняя часть до заплечиков имеет больший диаметр и взаимо действует с корпусом капсулы 21, а нижняя - с колпачком. Диск-носитель 8, бесконечный цепн транспортер 2 и передаточное колесо транспортного ротора рабоггют согласовано во времени от электродвигател 22, транспортер 2 связан с валом эле родвигателя 22 посредством ремня 23. Диск-носитель 8 совершает шаговое враиенке, для чего вал 10 соединяетс с приводом 24, связанным с электродв .елем 22 ремнем 25. Ведущее зубчат .:олесо 14, связанное с роликами 7,вр щается от привода 26, соединенного с помощью ремня 27 с приводом 24. Ведущее зубчатое колесо 14 вращается непрерывно, а главный вал 10 совершает шаговое вращение вперед между периодами останова, в течение которого выполняются операции подачи капсулы, проверки ее годности и п редачи. Измерительная станция 5 оснащена лампой 28 и электронным устройством 29, которое реагирует на отраженный от вращающейся капсулы свет и дает сигнал на блок преобразования и запоминания (на чертеже не показаны). Станция 5 также имеет передаточное приспособление 30, смонтированное между диском-носителем 8 и сортировочным ротором. Сортировочный ротор состоит из вращающейся головки 31 с кольцевой канавкой 32, по периферии головки расположены ячейки 33 для приема капсул 211 Каждая ячейка 33 состоит из двух частей: верхней 34 и нижней 35, причем кольцевая канавка 32 расположена между частями ячейки. Верхняя 34 и нижняя 35 части ячеек через воздушные каналы 36 сообщаются с первой вакуумной камерой 37 сортировочного ротора, находящейся внутри головки 31 , смонтированной на полом валу 38 с продолговатым пазом 39, размещенном в корпусе 40 между подшипниками 41 и 42 .Образованное между подшипниками 41 и 42 пространство образует вторую вакуумную камеру сортировочного ротора, которая через канал 43 сообщена с вакуумной магистралью 44. Полый вал 38 на нижнем своем конце несет зубчатое колесо 45, кинематически связанное с зубчатым колесом 46, сидящим на главном валу 10, и поэтому головка 31 сортировочного ротора вращается согласно во времени с шаговым вращением главного вала. Диаметр головки 31 в два раза меньше диаметра диска-носителя 8, она снабжена шестью ячейками 33 для приема капсул 21, а диск-носитель 8 имеет двенадцать гнезд 15 для приема капсул, позтому у зубчатых колес 45 и 46 передаточное отношение 2:1 и каждое гнездо 15 с капсулой 21 периодически подается на передаточное приспособление 30, причем на это приспособление одновременно поступает ячейка 33 сортировочного ротора. Для осуществления передачи капсул от измерительной станции на сортировочный ротор / постоянно создается вакуум внутри камеры 37 на втягивание воздуха внутрь через канал 36 с тем, чтобы обеспечить притягивание и удержание капсул в ячейках ЗЗ. Автомат снабжен рычагом 47 для извлечения отбракованных капсул из сортировочного ротора, имеющим возможность возвратно- поступательного движения (фиг.2 и 5). Рычаг 47 представляет собой удлиненный стержень, шарнирно смонтированный на другом рычаге 48 и одним концом связанный с включаемым по сигналу измерительной станции 5 электромагнитом 49 через подпружиненный кривошип 50. На другом конце он имеет трехзубую вилку с зубьями 51, 52 и 53, причем зуб 51 расположен над головкой 31, в зоне размещения колпачка капсулы, зуб 52 - в кольцевой канавке 32, в зоне соединения колпачка с корпусом, а зуб 53 - ниже головки, в зоне размещения корпуса капсулы 2 1 .
Сбор отбракованных капсул обеспечивается с помощью лотка 54, вывод из автомата годных к употреблению капсул - регулируемым желобом 55.
Автомат для сортировки капсул работает следующим образом.
Подлежащие сортировке капсулы загружаются в воронку 1, ,из воронки они попадают в гнезда 3 бесконечного транспортера 2, который проводит их через механизм 6, где капсулы ориентируются в положение колпачком вперед. Затем капсулы поступают на передаточное колесо 4 транспортного ротора, причем при прохождении колеса 4 через гнезда 3 пальцы приподымают капсулу из гнезда и передают на передаточную позицию к диску-носителю 8 измерительной станции 5. Как только капсула 21 подходит к гнезду 15 диска-носителя В всасывание от пальца отключается и капсула под действием всасывания,создаваемого измерительной станцией,перемещается в гнездо 15. Вращаемые ролики 7, образующие гнездо, приводят капсулу во вращение вокруг их осей, и диск-носитель совершает шаговое вращение, подводя очередную капсулу к электронно-оптическому устройству (28-29) для проверки.
Совершая далее шаговое вращение, диск-носитель 8 подает каждую проверенную капсулу на передаточное приспособление 30, расположенное на линии ячеек 33 сортировочного ротора.В этом iviecTe всасывание через воздушные каналы 16 прекращается с помощью клапана 18, а всасывание через каналы у ячейки 33 сортировочного ротора продолжается и капсула благодаря этому попадает в ячейку и далее перемещается уложенной в этом гнезде.
По мере того как головка 31 сортировочного ротора совершает шаговое вращение и если капсула 21 оказывается негодной, вступает в действие рычаг 47, управляемый электромагнитом 49 по сигналу измерительной станции 5 зубья 51, 52 и 53 рычага располагаются на пути движения капсулы, находящеся в ячейке 33, и сбрасывают ее с сортировочного ротора в лоток 54. Годные же капсулы не сбрасываются, а перемещаются вместе с головкой 31 дальше на три шага поворота и затем удаляются с помощью желоба 55.
Описываемый автомат для сортировки капсул обеспечивает необходимую точность и надежность в работе, а также исключает повреждение капсул при сортировке.
Формула изобретения
Автомат для сортировки капсул,имеющих корпус с надетым на него колпачком, содержащий загрузочное устройство с вакуумным механизмом для поштучной подачи капсул, транспортный ротор с ячейками для размещения капсул и с вакуумн.ыми присосами для удержания капсул в ячейках, измерительную станцию, получающую изделия из транспортного ротора, сортировочный ротор с
кольцевой канавкой и с ячейками, каждая из которых имеет вакуумные присосы, расположенные выше и ниже кольцевой канавки, блок преобразования
5 и запоминания сигналов измерительной станции, электромагнит, воспринимающий сигналы блока, управляемый электромагнитом рычаг для извлечения капсул из сортировочного ро
Q тора, встроенные в роторы золотники для управления вакуумными присосами, вакуумную магистраль и привод, отличающийся тем, что, с целью расимрения технологических возможностей автомата путем-раздельной отбраковки корпуса капсулы и колпачка или совокупной их сортировки, сортировочный ротор снабжен двумя независимыми камерами, одна из которых соединена каналами с вакуумными присосами в зоне размещения корпуса капсу.лы, а другая - в зоне размещения колпачка капсулы, золотники связаны с камерами для последовательного или одновременного включения последних,
5 а рычаг для извлече ия капсул из сортировочного ротора снабжен трехзубой вилкой, один из зубьев которой расположен над сортировочным ротором в зоне размещения колпачка капсулы, втоO рой - в кольцевой канавке ротора в зоне размещения соединения колпачка с корпусом капсулы, третий же - ниже ротора в зоне размещения корпуса.
Источники информации, принятые во внимание при экспертизе:
1. Патент CUiA 3756 402 , кл . 209-7 3 , 1973 .
t9
33
32
«2
Si
37 35 33
.1 / / / /

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля и сортировки деталей | 1975 |
|
SU632405A1 |
| Сортировочное автоматическое устройство для контроля размеров деталей | 1971 |
|
SU540684A1 |
| Автомат для горячей высадки головок болтов | 1988 |
|
SU1606250A1 |
| Роторно-конвейерная машина для сортировки изделий | 1988 |
|
SU1632523A1 |
| Устройство для контроля и сортировки линз | 1980 |
|
SU910231A1 |
| Автомат для контроля и сортировки колец | 1987 |
|
SU1556768A1 |
| Автомат для контроля и сортировки изделий цилиндрической формы | 1985 |
|
SU1359006A1 |
| Автомат для контроля и сортировки герконов по линейным размерам | 1990 |
|
SU1727937A1 |
| Автомат для сортировки электродов по толщине | 1976 |
|
SU603438A1 |
| Автомат для контроля и сортировки цилиндрических деталей по размерам и форме | 1973 |
|
SU446324A1 |