(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Схват | 1981 |
|
SU921852A1 |
| Автоматическая линия для механической обработки деталей | 1976 |
|
SU580975A1 |
| Устройство для манипулирования заготовками типа труб | 1974 |
|
SU504597A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
1
Изобретение относится к машиностроению, а именшэ к конструкции автооператоров, и может быть использовано для загруэки Н разгрузки станков (например, токарн.ых) с конвейерным транспортом.
Известен автооператор, содержащий механическую руху с захватными органами и приводами продольного перемещения поворота и зажима fll.
Этот автооператор имеет значительные габариты и большие динамическле нагрузки.
Изобретение позволяет устранить указанные недостатки.
Цель изобретения достигается за счет выполнения привода поступательного перем&щення в виде силового цилиндра с полым штоком, несушим на одном конце руку, а на Другом - дополнительный силовой цилиндр также с полым штоком, внутри которого расположена с возможностью поступательного перемещения и вращения штанга, кинематически связанная с захватными органами и приводом поворота.
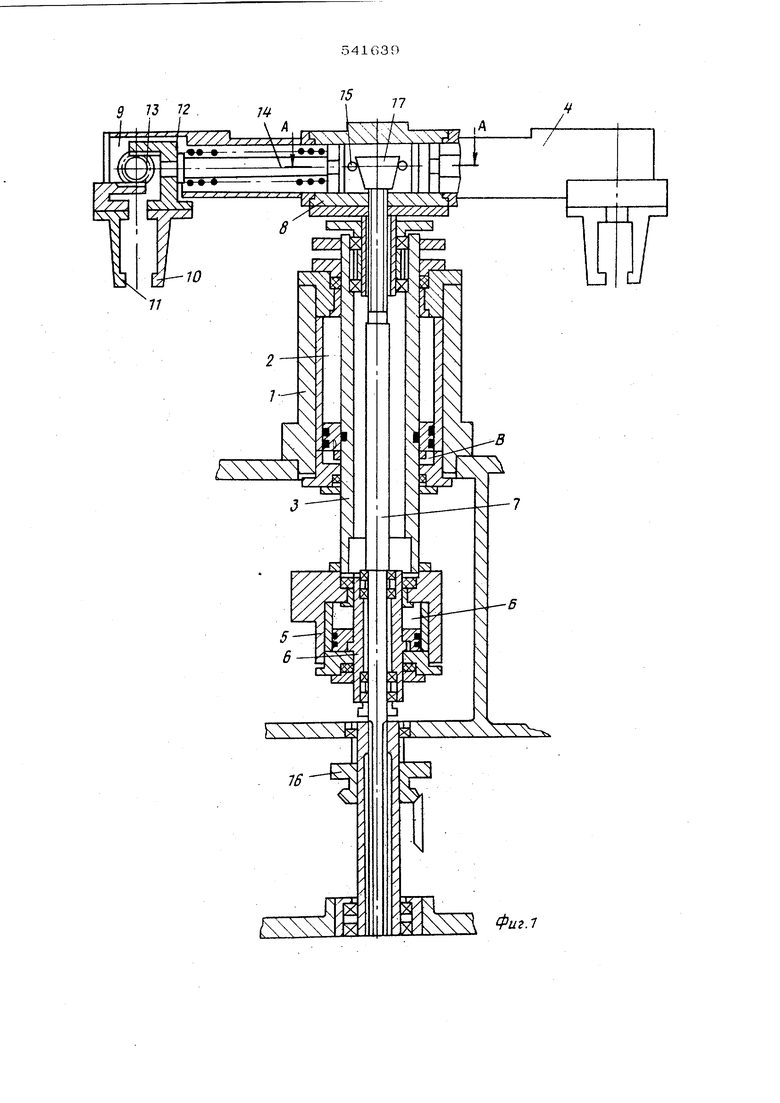
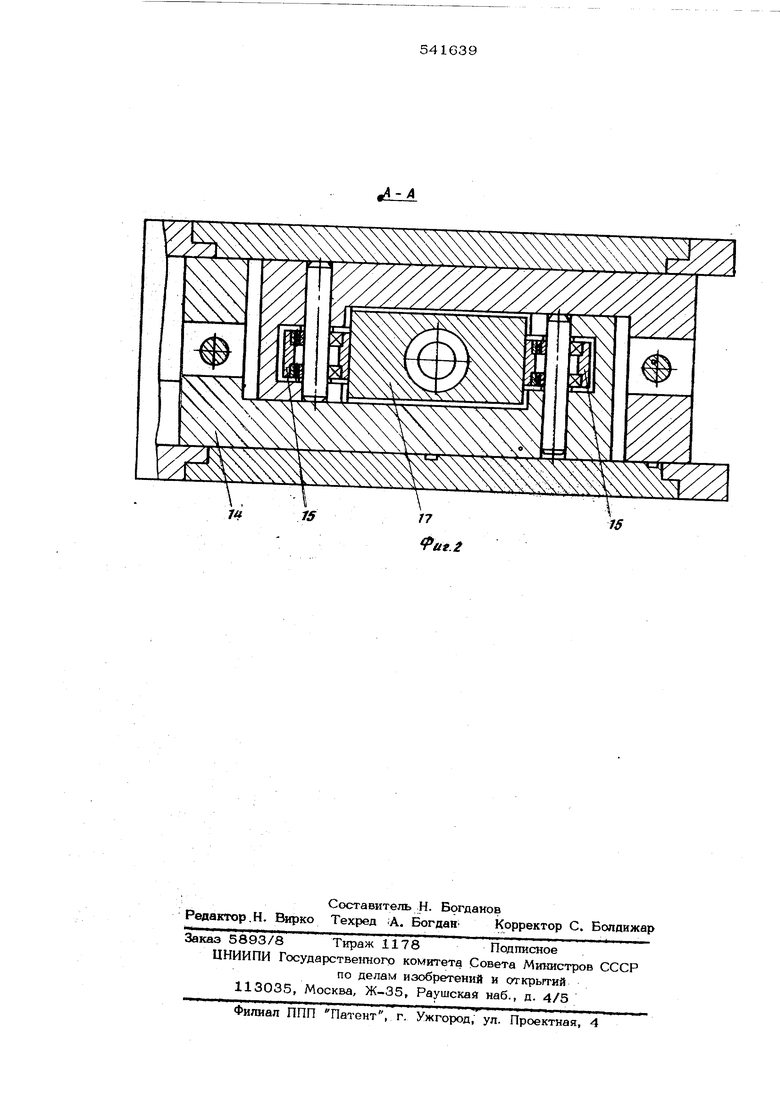
На фиг. 1 изображен автооператор, продольный разрез; на фиг. 2 - разрез по А-А на 4иг. 1.,
Автооператор содержит основанне 1, установленный на основании силовой цилиндр 2, например гидроцилиндр привода поступательного перемещения, с полым штоком 3, руку 4, установленную на конце штока 3 с возмоностью вращения, I дополнительны и силовой цилиндр 5, в данном случае тоже гидроцилиндр, с полым щтоком 6, укрепленный на другом конце полого штока 3 и являющийся приводом зажима, и привод поворота руки. Штанга 7 .установлена в прЛости штоков 3 к 6 с воэможностью Iпоступательного перемещения и вращения и зафиксирована в осевом напра&пении относительно щтока 6. Рука 4 содерм жит корпус 8, два захвата 9 с губками 10 и 11, снабженными рейками 12, взаимодействующими с шестернями 13, и два подпружиненных ползуна 14, снабженных ропикамя 15 и связанных с губками 10.
Штанга 7 шлнцевыми концами взаимодействует с корпусом 8 руки 4 и с ппицевой втулкой 16, кинематически связпнпгп с
приводом поворота (на чертеж-т не показан). На конце штанги установпгэн копир 17, взаимодействующий с роликами 15 ползунов 14.
Автооператор работает следующим образом.
При подаче рабочей среды в зону Б гид- j роцилиндра 5 (см. фиг. l) шток и связанная с ним штанга 7 с копиром 17 перемета-ются вниз. Копир, воздействуя на ролики 15,j и перемещает ползуны 14 и вместе с ними зажимные губки 10, которые через рейки |Q 12 и шестерни 13 воздействуют на зажимные губки 11, раскрывая, тем самым, захватные органы.
Одна пара зажимных губок 10 и 11 при|НИмает деталииз патрона обрабатывающего |5 станка (на чертежах не показан), другая пф ра зажимных губок - с транспортера (на чер тежах не показан). Затем давление;в полос-. ти Б г дроцилиндра 5 снимаете, и шток 6 вместе со штангой 7 н копиром 17 переме-. 20 щаесся вверх, ползуны 14 под действием пружин перемещают губки 10 и 11, которы э зажимают детали.
Затем рабочая среда подается в зону Б гидрюцилиндра 2, и шток 3 поднимает руку 25 4 вместе с захватными органами, несущими детали на заданную высоту.
Поворот осуществляется воздействием шлидевой втулки 16 через штангу 7 на руку 4.
После этого снимается давление в полос4ти В гидроцилиндра 2, и рука 4 вместе с захватными органами и деталями опускается, губки разжимаются t (как описано выше), и деталь с транспортера загружается в патрон станка, а обработанная деталь поступает на транспортер. Затем цикл повторяется.
Формула изобретения
Автооператор, содержащий механическую руку с захватными органами и приводами поступательного перемещения поворота и за4,жима, отличающийся тем, что, с целью снижения динамических нагрузок и уменьшения габаритов, привод перемещения выполнен в виде силового цилиндра с полым штоком, несущим на одном конце руку, а на Другом - дополнительный силовой цилиндр, также с полым штоком, внутри которого pad- положена с возможностью поступательного перемещения и вращения штанга, кинематически связанная с захватными органами и приводом поворота.
Источники информации, принятые во внимание при экспертизе:
LLA
