1
Изобретение относится к машиностроению и может быть использовано при соэоании промышленных роботов.
Известен манипулятор, содержащий несуший корпус, установленный с возможностью S качания относительно непоцвижных кронштейнов, поовижнуго относительно корпуса кисть и привод выдвижения руки, содержащий шестерню, кинематически связанную с кистью
т-W
Однако у известного устройства расположение привода выдвижения руки на подвижном корпусе увеличивает вес подвижных частей руки и затрудняет обслуживание манипулятора, что снижает эксплуатационные 15 характеристики кшнипулятора.
Цель изобретения-улучшение эксплуата- цнонных характеристик.
Эта цель достигается тем, что привод выдвижения руки установлен на неподввж- 20 ных кронштейнах, а его шестерня установлена на оси качания несущего корпуса.
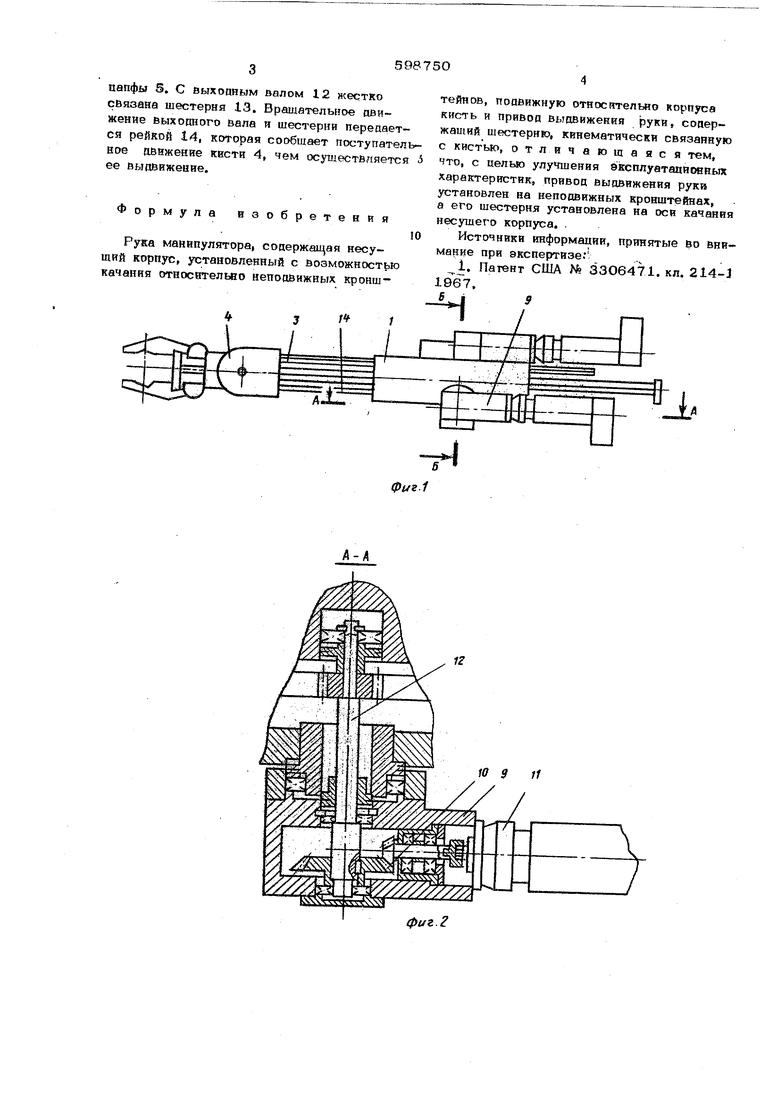
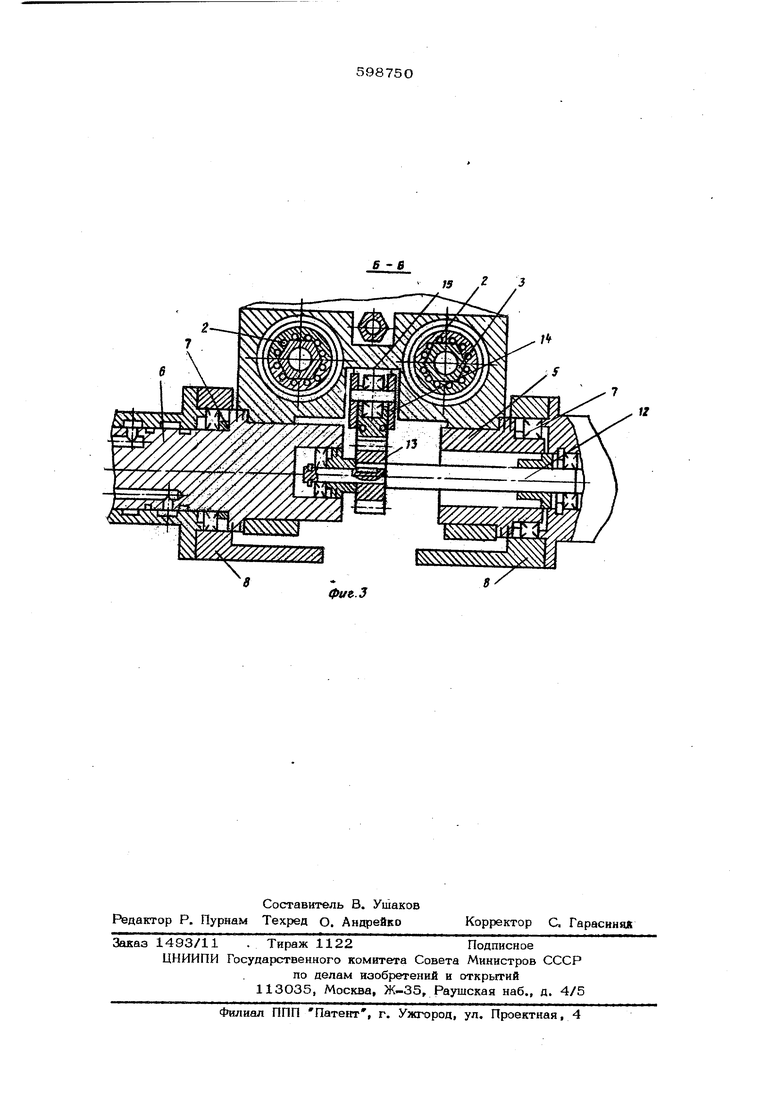
На фиг. 1 дана предлагаемая рука манипулятора, обший вид; на фиг, 2 - сечейие А-А на фиг. 1; на фиг.3 - сечение Ё-Б на фиг.
Рука манипулятора сопержит несущий корпус 1, внутри которого в шариковых вапра вляюших 2 установлены опорные скалки 3, на которых .закреплена кисть 4., С. несушям корпусом 1 жестко связаны цапфы 5 н 6, установленные на пошивпниках 7, которые закреплены в непосшнжных кронштейнах 8. К одному на неподвижных 1фонштейнов 8 крепи-Рся привод выдвижения рукв. Он содержит корпус 9, внутри которого смонтврован конический редуктор Ю, приводимый во вращение двигателем 11, установленным на корпусе 9. Выходной вал конического редуктора 12 прохопит внутри оапфы 5 и жесгкЬ связан с прямозубой шестерней 13, Шестерня 13 находится в зацеплении с рейкой 14. К переднему концу рейки 14 крепится кисть 4. Для выбора люфта между шестерней. 13 и рейкой 14 имеется подпружиненный ролик 15,
Выдвижение руки манипулятора пронсходат следующим образом.
Вртиающий момент от двигателя 11 через конический редуктор 10 поступает на выходной вал 12, который проходит внутри папфы 5. С Выходным валом 12 жестко связана шестерня 13. Вращательное движение 6ЫХОДНОГО вала и шестерни передается рейкой 14, которая сообщает поступател ное движение кисти 4, чем осуществляется ее выдвижение. Формула изобретения Рука манипулятора, содержащая несущий корпус, установленный с возможностью качания относительно неподвижных кронштеинов, подвижную относительно корпуса кисть и привод выдвижения |руки, содержаший шестерню, кинематически связанную с кистью, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик, привод выдвижения руки установлен на неподвижных кронштейнах, а его шестерня установлена на оси качания несущего корпуса. Источники информации, принятые во внимание при экспертизе: 1. Патент США N 3306471. кл. 214-J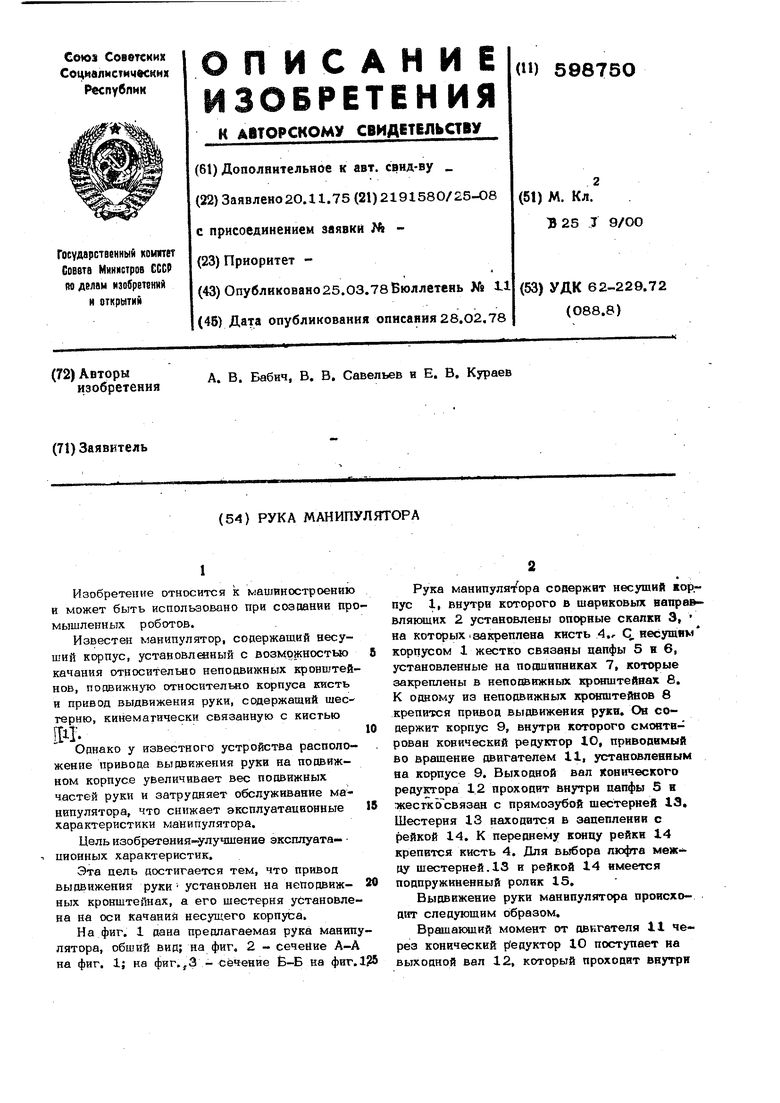
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1980 |
|
SU908587A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Рука робота | 1991 |
|
SU1757877A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1977 |
|
SU738866A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
фиг.Е
фие.З
