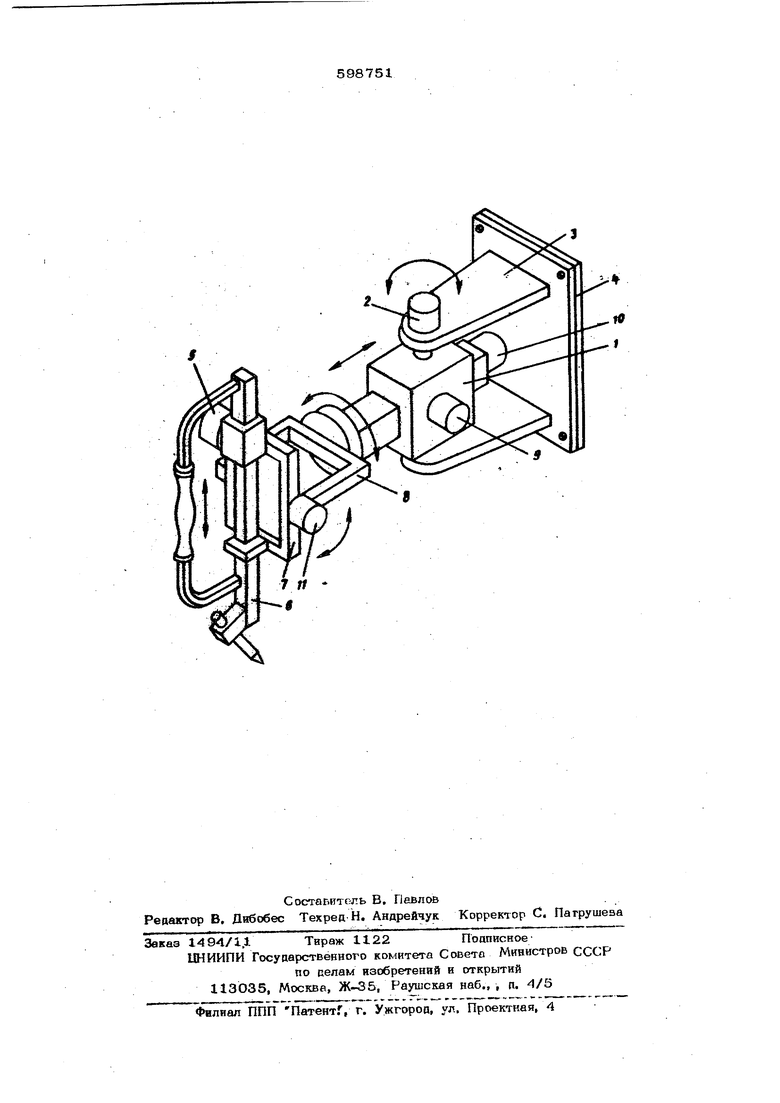
Ha чертеже изображена описываемая рукоятка, общий вид. Рукоятка содержит рычаг 1 датчика 2 горизонтальных угловых перемещений, корпус 3 которого закреплен на выходном звене 4 робота, а также датчик 5 линейных перемещений имигагора б со скобой 7. Подвижный элемент 8 дополнительного датчика 9 линейных перемещений, помещенный в рычаг 1 датчика .2, соединен с рычагом 1 с помощыю первого датчика 10 угловьгх перемещений в шарнирно через второй датчик It угловых перемещений со скобой 7. При смещении оператором имитатора 6 В том или ином ваправлении датчики линейных н угловых перемещений еыйают сиг налы управления на приводы соответствующи координат робота, что приводит к перемещению выходного звена 4 робота в заданвом направлении и комйенеацни величины произвеиенного оператором смешения имитатора 6 Непрерывное воздействие оператора на имитатор 6 приводит к непрерывному перемещению Соответствующих звеньев робота. При этом взаимное расположевие элементов рукоятки обучения изменяется лщиь в превелах, несколько яревЁгшаюших норрг чувствительности датчиков. Датчики 2,5,9,1О и 11 устанавливают в нулевое при прекрашенни воздействия на ймйтйтор 6 фик саторами (на чертеже не показано), что обеспечивает заданную жесткость ири воспр из&еденви врограммы. Предлагаемая рукоятка .с учения ираволя осуществяягь ручное управленвсепятикоорданатным роботом сферический егрукгурь. При втом датчик 2 управляет азимутальным поворотом руки, датчик 9 - выдвижени руки, датчик 5 имитатора 6 - наклоном руки, датчики 10 и 11 - положением кисти робота и тем самым ориентацией нмйтатора 6 рабочего органа. После записи программы рукоятка обучения может быть cHirra с выходног звена робота и на её место может быть установле оргав. При этом положение рабочего органа должно соответствовать положению имитатора рукоятки обучеяи5. Предлагаемую рукоятку обучения целесообразно использовать для записи программы управления движением рабочего органа по заданной траектории, например по линии сварки. Формула изобретения i. Рукоятка обучения промышленного робота, содержащая имитатор рабочего органа, рычаг датчика горизонтальных угловых перемещений, корпус которого закреплен на выходном звене робот.а, и датчик линейных вертикальньпс перемещений имитатора со скобой и подвижным элементом, отличающаяс я тем, что, с целью обеспечения многокоординатного управления рабочим органом, в нее ввеДёйУ дополаителвяые датчик линейнОго перемещения, вмонтированный в рычаг датчика горизонтальных утдовых, перемещеанй, и датчик угло&ьвс перемещений, расположенные во взаимопарпендикулярных, вертикальных плоскости, а подвижный элемент дополнительного датчика линейных перемещений соединен с этим рычагом с помощью одного из дополнительных датчиков угловых перемещений и через второй датЧйк - со скобой датчика линейных перемещений йМйтатбра, 2. Рукоятка по п, 1, отличающаяся тем, что подвижные элементы датчиков снабжены -фиксаторами нулевого положения, Исгочники информации, принятые во внимание при экспертизе: 1,Опыт эксплуатации промьпнленных роботов (по матеркапам 2-го международно га симпозиума по промышленным роботам), М, 1974, с. 26-27, рис. 4 2,Авторское свидетельство СССР Jvfb 42О219, кл. В 23 К 9/12, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рукоятка обучения промышленного робота | 1977 |
|
SU737205A1 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Способ подготовки программы управления движением рабочего органа робота | 1976 |
|
SU630614A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU726494A1 |
| Тренажер для подготовки операторов и оценки качества задания программы перемещений промышленных технологических роботов | 1991 |
|
SU1825728A1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| Задающее устройство для дистанционного управления роботом-манипулятором | 1988 |
|
SU1516344A1 |