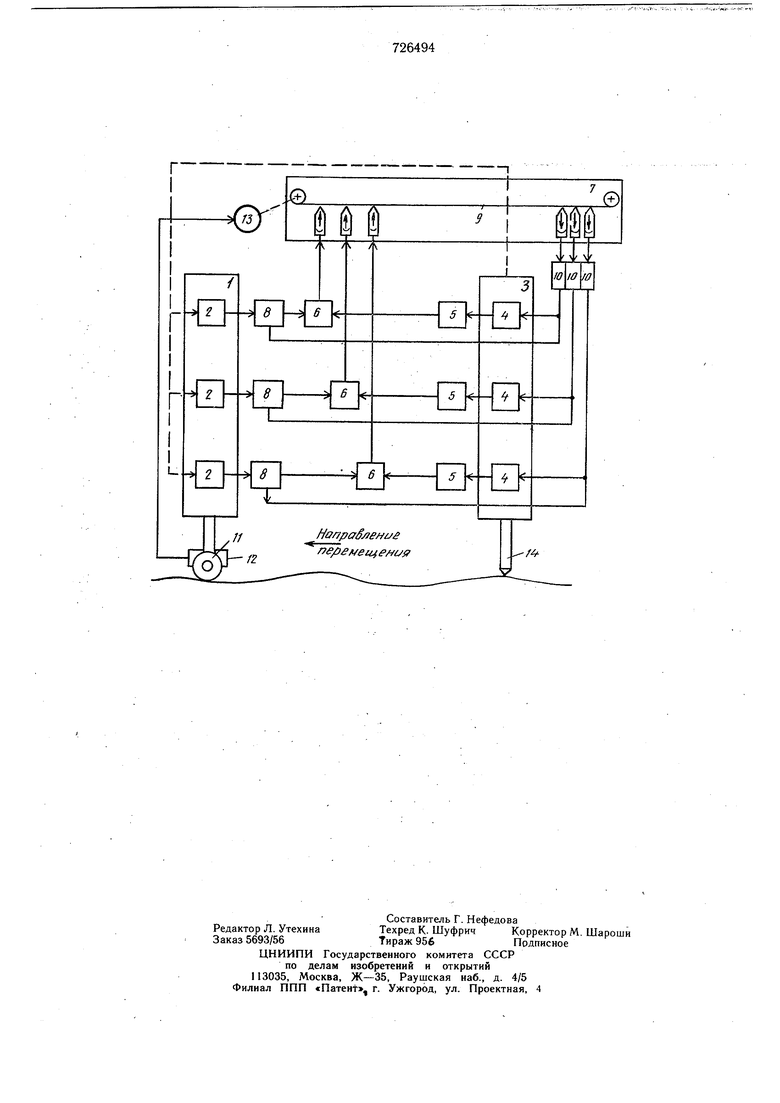
(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ УПРАВЛЕНИЯ РОБОТОМ На чертеже представлена функциональная схема устройства для записи программы управления промышленным роботом. Схема содержит рукоятки 1 обучения, датчики 2 положения рукоятки обучения, исполнительный орган 3, приводы 4, датчики 5 положения исполнительного органа, сумматоры 6, блок 7 памяти, первые ключи 8, программоноситель 9, вторые ключи 10, копирующий ролик 11, датчик 12 перемещения рукоятки обучения, привод 13 программносителяи рабочий орган 14. Устройство работает следующим образом. Оператор по ведущей координате, величина перемещения по которой на данном числё программы максимальна, коммутирует первым ключом 8 первый его йыход, а вторым ключом 10 вход привода 4. По остальным координатам первыми ключами 8 скоммутированы его вторые входы, а вторые ключи будут в разомкнутом состоянии. Затем оператор прижимает копирующий ролик 11 к изделию и, направляя ролик 11 вдоль заданной траектории, вручную перемещает рукоятку 1 в требуемом направлении. Смещение рукоятки 1 от нулевого положения приводит к появлению сигнала на выходе датчиков 2 положения рукоятки 1. Одновременно вращение за счет сил трения качения копирующего ролика 11 приводит к перемещению программоносителя 9, поскольку на привод программоносителя 13 будут поступать сигналы датчика перемещения рукоятки обучения 12 ролика 11. Сигналы датчика 2 положения рукоятки по ведущей координате поступают на вход соответствующего привода 4 исполнительного органа 3 робота и через датчик положения 5 и сумматор б в блок памяти 7. Исполнительный орган 3 робота по ведущей координате перемещается, а сигнал датчика положения 5 записьщаетс я на програ ммоноситель 9 Сигналы датчиков положения 2 по остальным координатам записываются в блок памяти 7. После прохождения рабочим органом 14 по ведущей координате расстояния до начального положения копирующего ролика 11 на выходах блока памяти появятся сигналы отклонения датчиков положения 2. По ведущей координате эти сигналы не поступают на привод 4 из-за того, что второй ключ 10 по данной координате разомкнут. Подругим коорди ffSTlM указанньге сигналы через замкнутые вторые ключи 10 поступят на приводы 4, и исполнительный орган 3 робота будет воспроизводить отклонения рукоя(тки 1 от нулевого положения, зарегистрированные датчиками положения 2. Поскольку рукоятка 1 связана с исполнительным органом 3 робота через датчики положения 2, то при воспроизведении исполнительным органом 3 робота записанных на программоноситель 9 сигналов на датчики 2 исполнительным органом 3 будет оказываться дополнительное воздействие. Это воздействие будет вызываться воспроизводящим перемещением исполнительного органа 3 робота, а не действием оператора. Однако записи сигналов датчиков положения 2, вызванных воспроизводящим отклонением исполнительного органа 3, не произойдет, поскольку эти сигналы с датчиков положения 2 и с датчиков положения 5 алгебраически складываются в сумматоре 6. С выхода сумматора 6 в блок памяти 7 будут поступать, таким образом, только сигн;алы отклонения рукоятки 1 от первоначального положения. В результате исполнительный орган 3 робота с рабочим органом 14 будет воспроизводить перемещение рукоятки 1 с запаздыванием, т. е. будет осуществляться следящее копирование рабочим органом 14 заданной траектории вслед за рукояткой 1. Связь датчика перемещения 12 копирующего ролика 11 с приводом программоносителя 13 позволяет производить запись в произвольном масщтабе времени. Применение изобретения позволит осуществлять запись программы управления промышленным роботом, перемещающимся по траектории, имеющей участки значительной кривизны. Формула изобретения Устройство для записи программы управления роботом, содержащее датчик перемещения рукоятки обучения, выход которого соединен с входом привода программоносителя, связанного с блоком памяти,. и по каждой регулируемой координате - датчик положения рукоятки обучения, связанный с исполнительным органом робота, и последовательно соединенные привод, датчик положения исполнительного органа и сумматор, выход которого подключен к соответствующему входу блока памяти, отличающееся тем, что, с целью расщирения фу} кциональнь1х возможностей устройства, оно содержит по каждой регулируемой координате первый ключ и второй ключ, вход которого соединен с соответствующим выходом блока, памяти, а выход - с входом привода и первым выходом блока памяти, а выход - с входом привода и первым выходом первого ключа, второй выход которого подключен ко второму входу сумматора, а вход - к выходу датчика положения рукоятки обучения. Источники информации, принятые во внимание при экспертизе 1.Журнал «Автоматическая сварка, 1976, № 9, с. 60-61. ,.,- 2..Авторское свидетельство СССР по заявке № 2363565/24, кл. В 25 J 9/00, 1976 (прототип).
10
т
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Устройство для записи программыупРАВлЕНия пРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU811203A1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| Устройство для записи программы промышленным роботом | 1978 |
|
SU706823A1 |
| Устройство для ввода программы упра-ВлЕНия пРОМышлЕННыМ РОбОТОМ | 1979 |
|
SU830315A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для управления многозвенным манипулятором | 1985 |
|
SU1257613A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Способ подготовки программы управления движением рабочего органа робота | 1976 |
|
SU630614A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
Н
в М«
г
f
г
к
|
г 2
Hor/paS/ieHf
,// nepeHeu Pf fjff
/2
k/4
