Изобретение относится к оборудованию для нанесения гальванических покрытий на различные изделия.
Известна автооператорная гальваническая линия, содержащая расположенные по ходу технологического процесса ванны с оноролозителям,и, ходовой путь, автооператор с захватами и ;механизмом го ризонтального перемещения, токоведущие штангя с несущими штырями, подвески и механизм их вертикального перемещения с ловителями штанг.
Известная гальваническая линия имеет тот недостаток, что в ней не устранены холостые ходы автоопсратора при установке и снятии штанг с опороловителей. Это усложняет управление автоонератором и не позволяет новысить производительность линии.
Целью изобретения является повышение производительности линии путем сокращения времени передачи токоведущнх штанг при межопе(рационной загрузке и выгрузке их с автоонератора.
Это достигается тем, что захваты и ловители снабжены приводами возвратно-поступательного перемещения, а несущие шгыри токоведущих штанг установлены налротлз захватов и ловителей.
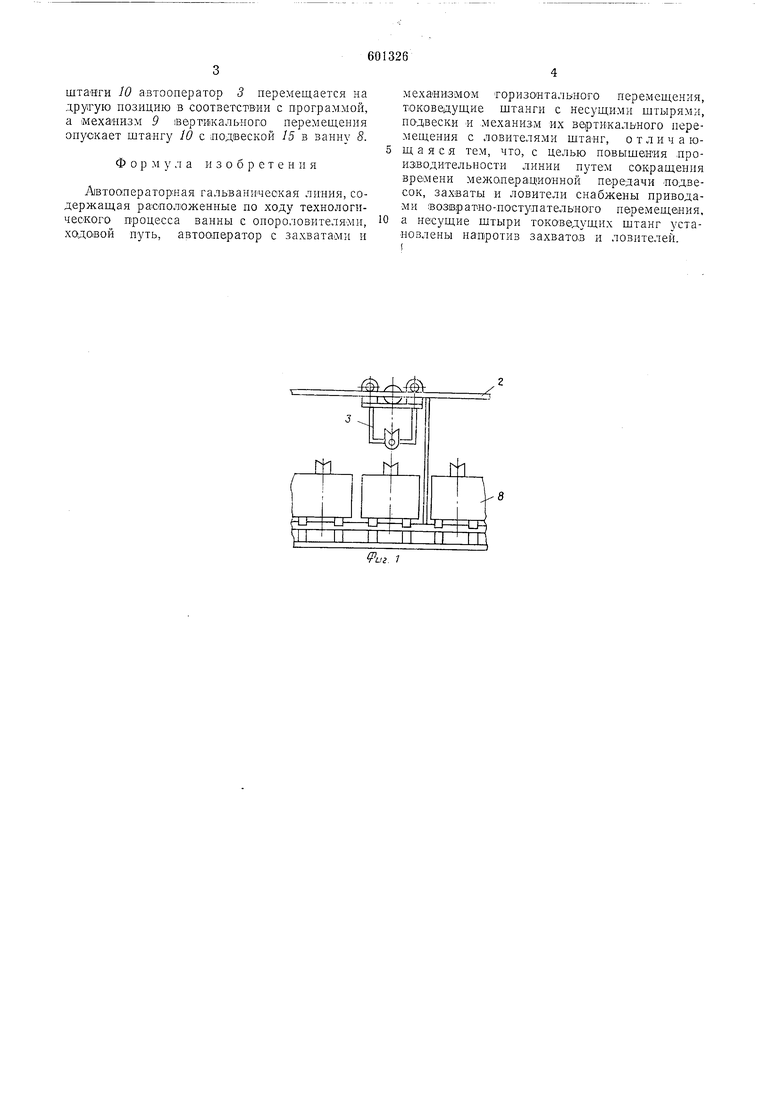
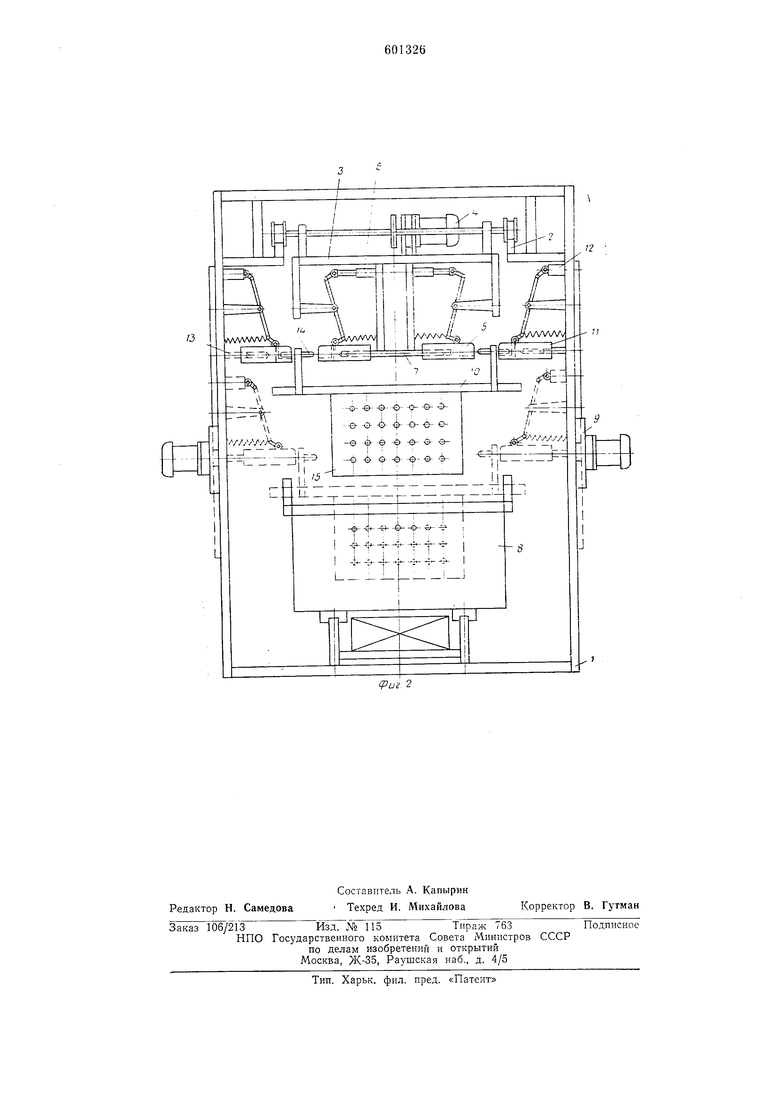
На фиг. 1 показана схема автоонераторной гальванической линии; на фиг. 2 - то же, поперечный разрез.
в верхней части каркаса / смонтирован ходовой путь 2, на который установлен автооператор 3 с механизмом 4 горизонтального перемещения. Автооператор 3 имеет захваты 5, снабн енные отдельным приводами 6, причем захваты 5 выполнены с возможностью перемещения по направляющей 7. Вдоль каждой из ван}1 8 с двух сторон на каркасе / смонтированы механизмы 9 вертикального перемещения токоведущих штанг 10, снабженные ловителями // с отдельньпш привода.ми 12. о1овители 11 установлены с возможностью перемещения по направляющим 13. Ловители 11 механизмов 9 вертикального перемещения и захваты 5 автооператора 5 размещены соосно. с несущими штырями 14 токоведущих штанг 10.
Устройство работает следующим образом.
Автооператор 3 с токоведущей штангой 10 И подвеской 15 останавливается в определенном положении над ванной 8. При этом ловители // находятся в верхнем положении. После остановки автооператора 5 ловители 11, перемещаясь по направляющим 13, находят на несущие штыри 14 штан- 10, а захваты 5 автооператора 3 сходят с них по направляющей 7. Перемещение захватов 5 автооператора 3 и ловителей // осуществляется посредством возв-ратно-поступательного движения приводов 6 и 12. После перегрузки
шта-нги 10 автооператор 5 перемещается на другую позицию в соответствии с программой, а механизм 9 верти калыюго перемещения опускает штангу 10 с лодвеской 15 в ванну 8.
Формула изобретения
Автооператорная гальваническая линия,содержащая раСПоложенные по ходу технологического процесса ванны с онороловителя-ми, ходовой путь, автооператор с захватаьми и
механизмом горизонтального перемещения, токоведущие щтанги с несущими щтырямн, иодвески и механизм их вертикального иеремещения с ловителями щтанг, отличающаяся тем, что, с целью повышения .производительности линии путем сокращения времени межолеращионной передачи подвесок, захваты и ловители снабжены приводами 1ВО31В|рат«о-постулательного перемещения, а несущие щтыри токоведущих щтанг установлены напротив захватов и ловителей. (
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператорная гальваническая линия | 1988 |
|
SU1516515A1 |
| Автоматическая линия для гальванической и химической обработки деталей | 1985 |
|
SU1300042A1 |
| Установка для гальванической обработки деталей | 1981 |
|
SU996527A1 |
| Автоматическая линия для металлизации плоских деталей | 1987 |
|
SU1507883A1 |
| Автооператор для гальванических линий | 1983 |
|
SU1138369A1 |
| Автооператор для гальванохимических линий | 1985 |
|
SU1330057A1 |
| Автоматическая линия для химической и электрохимической обработки печатных плат | 1982 |
|
SU1052570A1 |
| Автооператор для гальванических линий | 1980 |
|
SU952703A1 |
| Автооператор для гальванических линий | 1984 |
|
SU1178806A1 |
| Гибкая автоматическая гальваническая линия | 1991 |
|
SU1787177A3 |
X
/3
yy////)
p-
- -Э- -©- -O- -0- -©- -i)- -& -6- -o- - -e -e -tt -ф- O- -®Wyy,//,/
nn irriHI -о -Ф -S- -©- -Ф- -Q- $ъ
-©- -. -Ф- -0- A- 4
