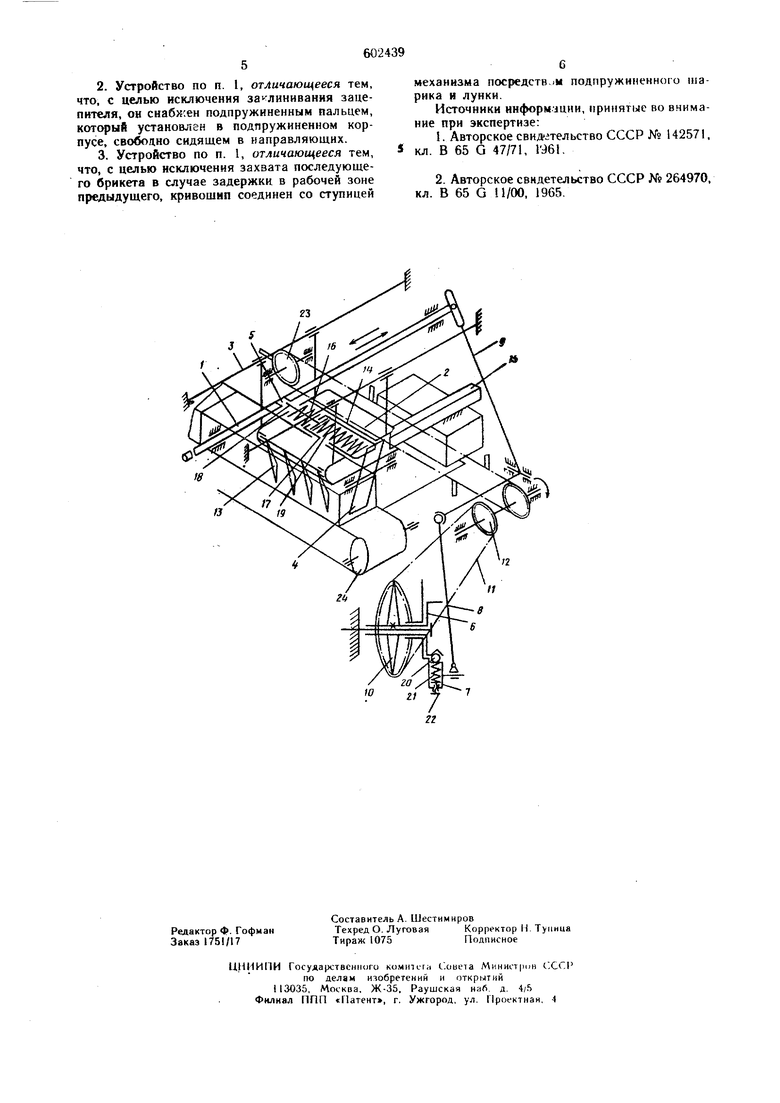
Изоб|)Сге11ие относится к транспортному оборудованию, в частности к механизмам для транспортиро К 1 и упаковки а тучных грузов, и может найт.и широкое применение для перемещения брикетов, например пищевых, из сплощного и.чп прсрь вного потока в гнезда транспортера упаковочной мащипы, а также в других отраслях промыщ.пенности. Известно устройство для автоматического перемещения ипучпых грузов, включаюпхее ценной толкатель, приводной электродвигатель с редуктором, электромагнитную муфту включения рабочего хода, сигнальный флажок, воздействуюп1,ий на концевой выключатель и электропусковую аппаратуру 1 . Однако в этом устройстве количество включений системы соответствует количеству перегруженных предметов, что снижает долговечность и надежность. Известно также устройство для перемещения штучных грузов, включаюп1ее шток, толкатель и сигнальный флажок, взаимодействующий с грузом 2. Данное устройство наряду с уже указанны%; недостатком имеет сложную конструкцию и низкую надежность. Целью изобретения является повышенне надежности и упрощение конструкции устройства, а также исключение заклинивания зацепителя и упорядочение выдачи брикетов. Это достигается тем, что толкатель выполнен разобщенным со штоком и снабжен щарнпрно подвешенными захватами одностороннего действия и зацепнтелем, взаи.модействующим с сигнальным флажко.м и соверн1ающпм возвратно-поступательное штоком, спнхрон1 311рованны.м гюередством кривошип по-пкплнно14) механизма с загружаемым трапспортером, прпчем запспитель в рабочем по.юженн кл-лимодействует с неподвижным коппром, установленным рядом с с1Пнальным ф,1ажком. Кроме того, запепитель снабл ен подпружиненным пальнем, который установ,1ен в подпружиненном корпусе, свободно сидянгем в направляюи1нх, njTOK имеет паз, взаимодействующий в исходном 1 рабочем положениях с пальцем зацепителя, а кривоппт соединен со сгуппцей механиз.ма иосредством нодпрхжннснного шарика и лунки. На чертеже изображена кинематическая схема описывае.мого устройства. Устройство содержит П1ток 1. толкате.1ь 2. 11аправляющие 3, сигнальный флажок -I. ILlTOK 1 разобщен с толкателем 2. синхрони.чпрован с шагом грузовых гнезд и имеет иаз п для соединения с толкателем 2 во время рабочего хода.
Кривошипно-шатунный механизм содержит ступицу 6, кривошип 7, шатун 8 и угловой рычаг 9, соединенный со штоком 1. Передача отбора мощность крутящего момента имеет звездочку 10, насаженную на ступицу 6, цепь 11 и звездочку 12, насаженную на ведущий вал толкающего транспортера.
Толкатель 2 содержит откидные гребенки 13 для захвата брикета и зацепитель 14 для соединения со штоком 1 от воздействия сигнального флажка 4. Копир 15 служит для фиксации зацепителя 14 во время рабочего хода.
Зацепитель 14 включает расцепляющую пружину 16, гильзу 17, палец 18, который может входить в паз 5, и предохранительную пружину 19. Кривошип 7 содержит шарик 20, который входит в лунку ступицы 6, пружину 21 и винт 22.
Устройство работает следующи.м образом.
При вращении ведущего вала цепного толкающего транспортера 23 звездочка 12 посредством цепи 1.1 и звездочки 0 вращает ступицу 6 и соединенный с ней подпружиненным шариком 20 кривошип 7. Передача рассчитывается так, чтобы перемещению гнезд на один шаг соответствовал один оборот кривошипа. Посредством шатуна 8 и углового рычага 9 шток 1 вхолостую двигается возвратно-поступательно и синхронно движению гнезд. Толкатель 2 при этом стоит на месте в исходном положении.
Поступающие по ленточлому транспортеру 24 брикеты воздействуют на сигнальный флажок 4, который выталкивает палец 18 зацепителя 14 до упора в поверхность штока I. Когда последний достигает крайнего исходного положения, палец 18 входит в па.з 5 и толкатель 2 начинает движение, захватывая брикет откидными гребенками 3 и переталкпоая его в гнезда транспортера. При этом расцепляющая пружина 16 сжимается, а гильза 17 с сигнального флажка переходят на копир 15, благодаря чему палец 18 не выходит из зацепления со штоком 1.
в этом время следующий брикет воздействует на сигнальный флажок 4, откидные гребенки 13 при возвращении толкателя 2 в исходное положение проскальзывают пад брикетом и опускаются в положение для захвата его, а гильза 17 с копиром 15 снова переходит на сигнальньтй флажок 4, и цикл повторяется без расцепления толкателя 2 со штоком 1.
В случае разрыЕ5а потока брикета или когда очередной брикет к моменту возвращения толкателя 2 не успевает нажать на сигнальный флажок 4, т. е. занять исходное положение к моменту возвращения толкателя 2, гильза 17 сходит с копира 15, расцепляющая пружина 16 выводит палец 18 из паза 5, толкатель 2 останавливается в исходном положении, а шток 1 будет двигаться вхолостую, пока очередной брикет не надавит на сигнальный флажок 4.
Для исключения заклинивания зацепителя 14, например, при .чацеплепии пальца 18 и паза 5 кромка.мп, когда толкатель 2 начал движение, а палец 18 не ьошел в паз 5, гильда 17, благодаря придо.хранительной пружине 19, свободно переходит на копир 15, не вызывая заклинивания.
В случае попадания в зону переталкивания лишнего брикета толкатель 2 не возвращается за следующим брикетом, так как благодаря соединению ступицы 6 с кривошипом 7 посредством подпружиненного шарика 20 и лунки кривошип 7 не совершает полного оборота до тех пор, пока толкатель 2, теперь уже двигаясь прерывисто, не переместит брикеты к загруженному транспортеру. После этого толкатель возвращается в исходное положение и цикл повторяется.
Благодаря синхрони.чированному с шагом гнезд штоку, содержащему паз для зацепления, отпадает необходимость во второй сигнальной системе, связанной с движением гнезд. Наличие толкателя, разобщенного со штоком и содержащего зацепитель, работающийнепосредственно от сигнального флажка, позволяет ограничиться одним сигналим только от брикета, при этом сигнальная система существеьшо упрощается и состоит только из снгнального флажка.
В связи с тем, что толкатель содержит откидные гребенки, повышается производительность устройства и его долговечность, так как во время перемещения предыдущего брикета к гнезду последующий брикет занимает исходное положение, нажимая на сигнальный,флажок. Благодаря этому при сплошном потоке устройство работает без разъединения толкателя со штоком.
Наличие в зацепителе скользящей гнльзы с подпружиненным пальцем обеспечивает надежность работы без заклинивания в сочетании с простотой и компактностью; Соединение кривошипа со тупицей посредством подпружиненного шарика и дунки предотвращает скапливание брикетов в случае задержки предыдущего брикета в зоне переталкивания, что повышает стабилышсть работы. Конструкия устройства с использованием отбора крутящего момента обеспечивает компактность, автономность от пневмо- и электросети, высокую надежность, долговечность и безопасность при высокой влажности и низких температурах.
Формула изобретения
1. Устройство для перемещения штучных грузов с одного транспортера на другой, например пищевых брикетов в упаковочную машину; включающее шток, толкатель и сигнальный фла жок, взаимодействующий с грузом, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, толкатель выполнен разобщенным со штоком, снабжен шарнирно подвешенными захватами одностороннего действия и зацепителем, взаимодействующим с сигнальным флажком и совершающим возвратно-поступательное движение штоком, синхронизированным посредс1вом кривошипно-и jTynHOго механизма с загружаемым транспортером, причем зацепитель в рабочем положении взаимодействует с неподвижным копиром, установленным рядом с сигнальным флажком.
2.Устройство по п. I, отличающееся тем, что, с целью исключения за лннивания зацепителя, он снабжен подпружиненным пальцем, который установлен в подпружиненном корпусе, свободно сидящем в направляющих.
3.Устройство по п. I, отличающееся тем, что, с целью исключения захвата последующего брикета в случае задержки в рабочей зоне предыдущего, кривошип соединен со ступицей
6
механизма посредств./м подпружиненного шарика и лунки.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидгтельство СССР № 142571, кл. В 65 G 47/71, 1961.
2.Авторское свидетельство СССР № 264970, кл. В 65 G П/00, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Устройство для загрузки контейнеров изделиями | 1988 |
|
SU1544644A1 |
| Автомат для сортировки электродов по толщине | 1976 |
|
SU603438A1 |
| Станок для сборки в пакет пластин коллекторов электрических машин | 1977 |
|
SU729711A1 |
| Подвесной конвейер | 1980 |
|
SU933564A1 |
| Устройство для контроля и сорти-РОВКи ЕМКОСТЕй | 1979 |
|
SU848096A1 |
| Станок для сборки гусеничной цепи | 1973 |
|
SU477813A1 |
| Поточная линия для обработки нескольких моделей детали | 1988 |
|
SU1549651A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для поштучной выдачи заготовок | 1984 |
|
SU1196224A1 |
23
/ .
93
