Изобретение относится к упаковочной технике и может быть использовано на предприятиях, оснащенных фасовочно-упаковоч- ными автоматами, для доставки товаров потребителю, в том числе непосредственно в магазины самообслуживания, а также на складах и оптовых базах.
Цель изобретения - повышение надежности в работе и удобства в эксплуатации за счет предотвращения повреждения укладываемых изделий в зоне перемещения ряда изделий и упрощения процесса фиксации загружаемого контейнера.
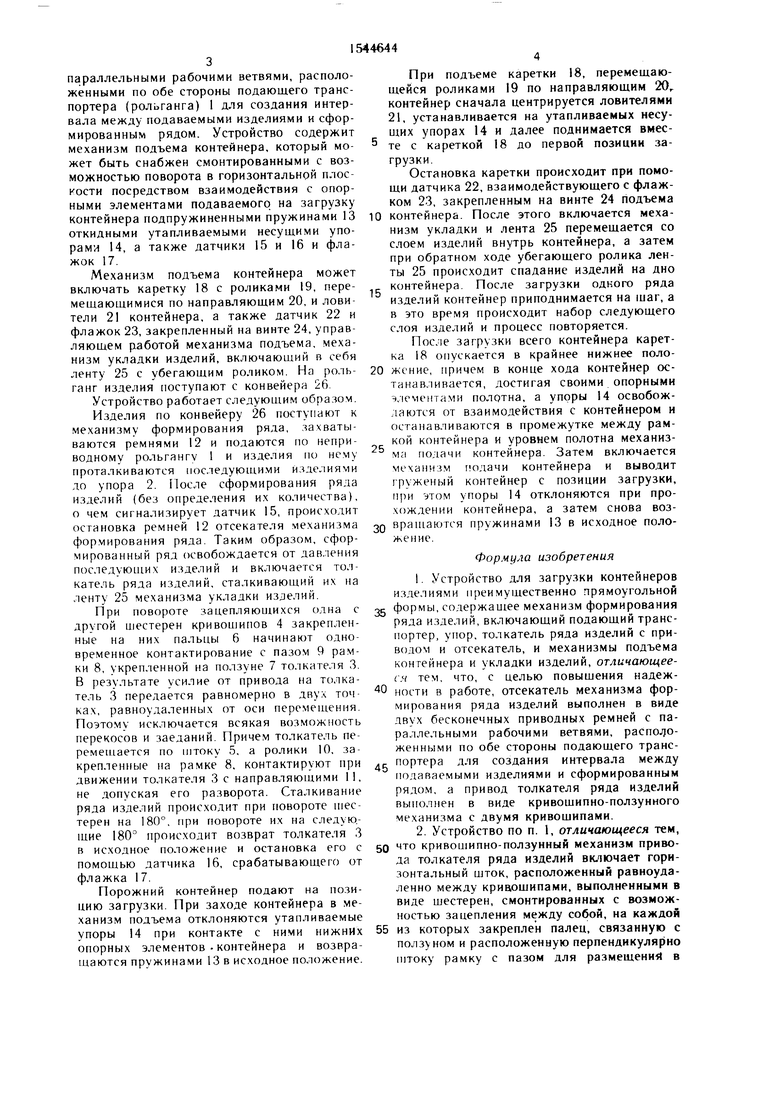
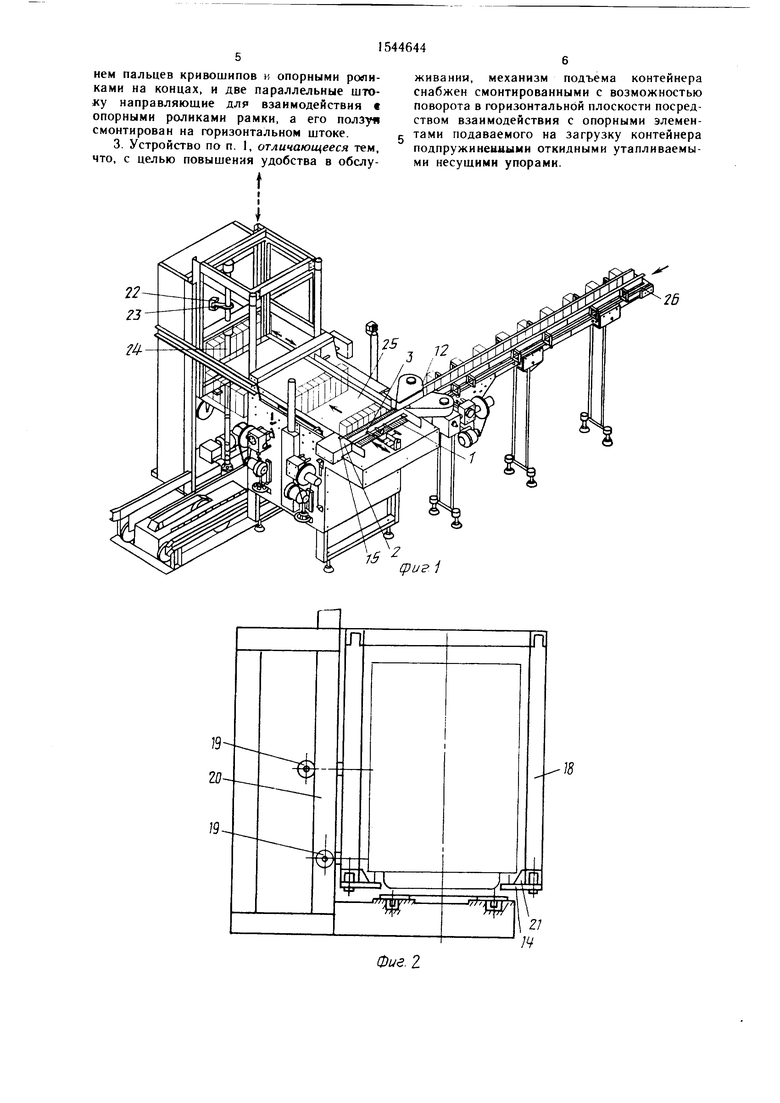
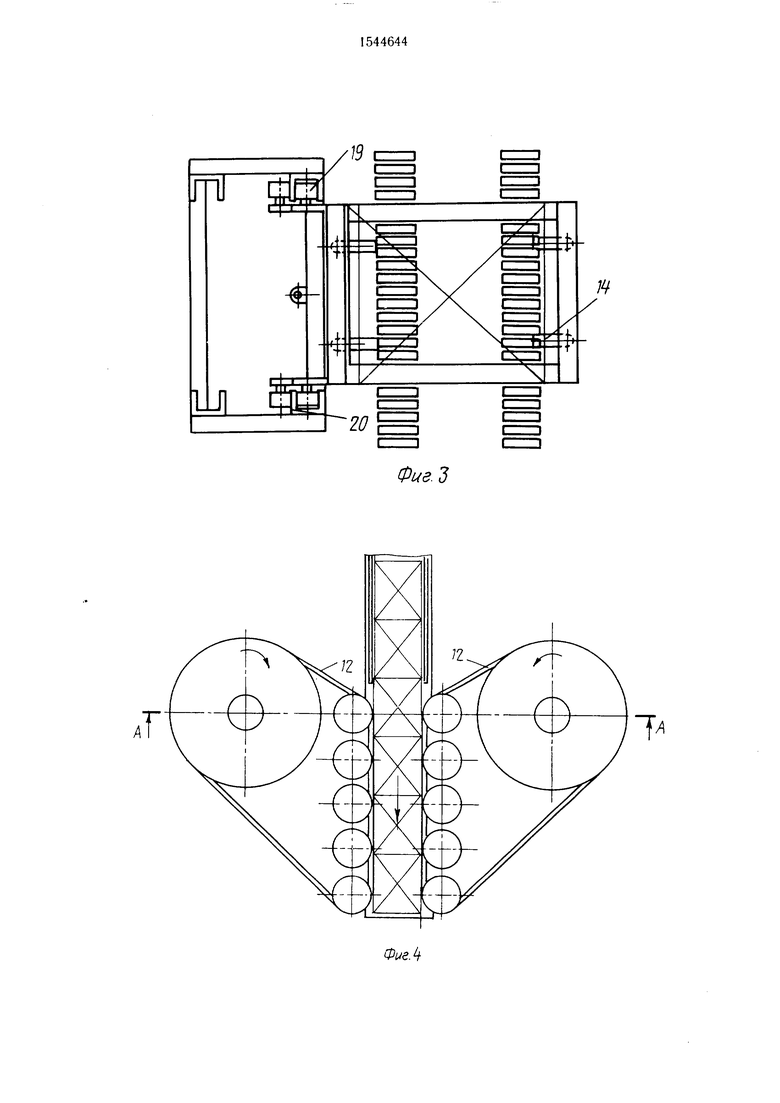
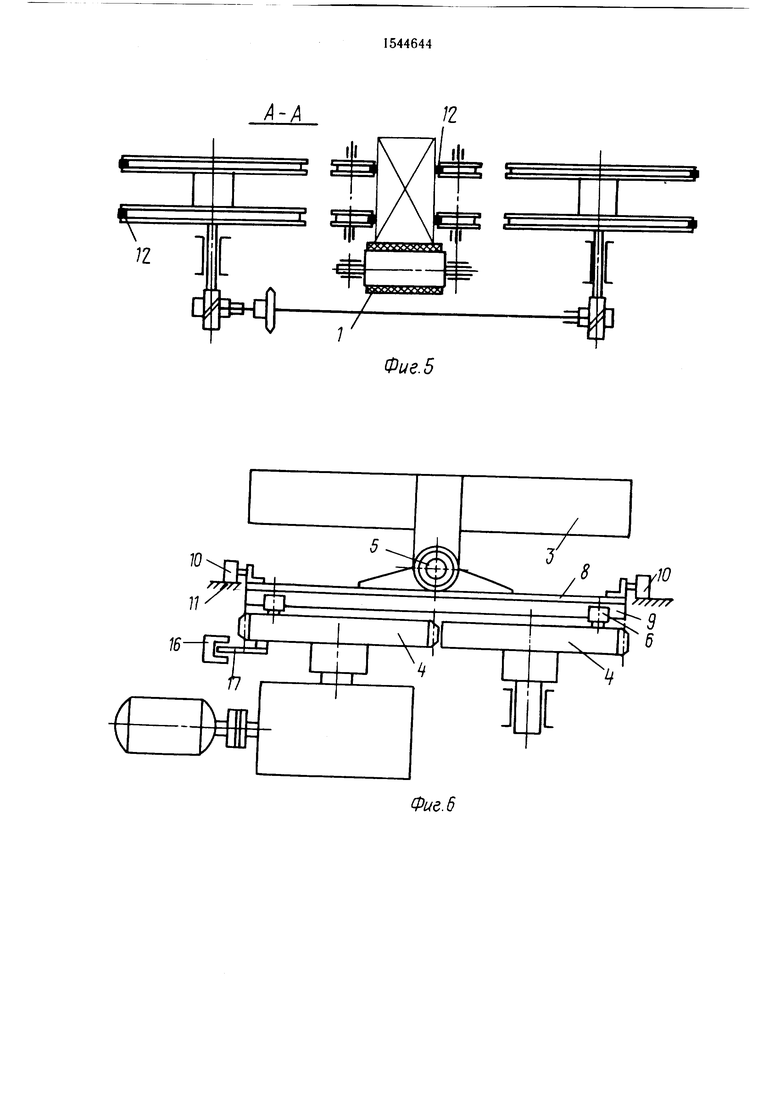
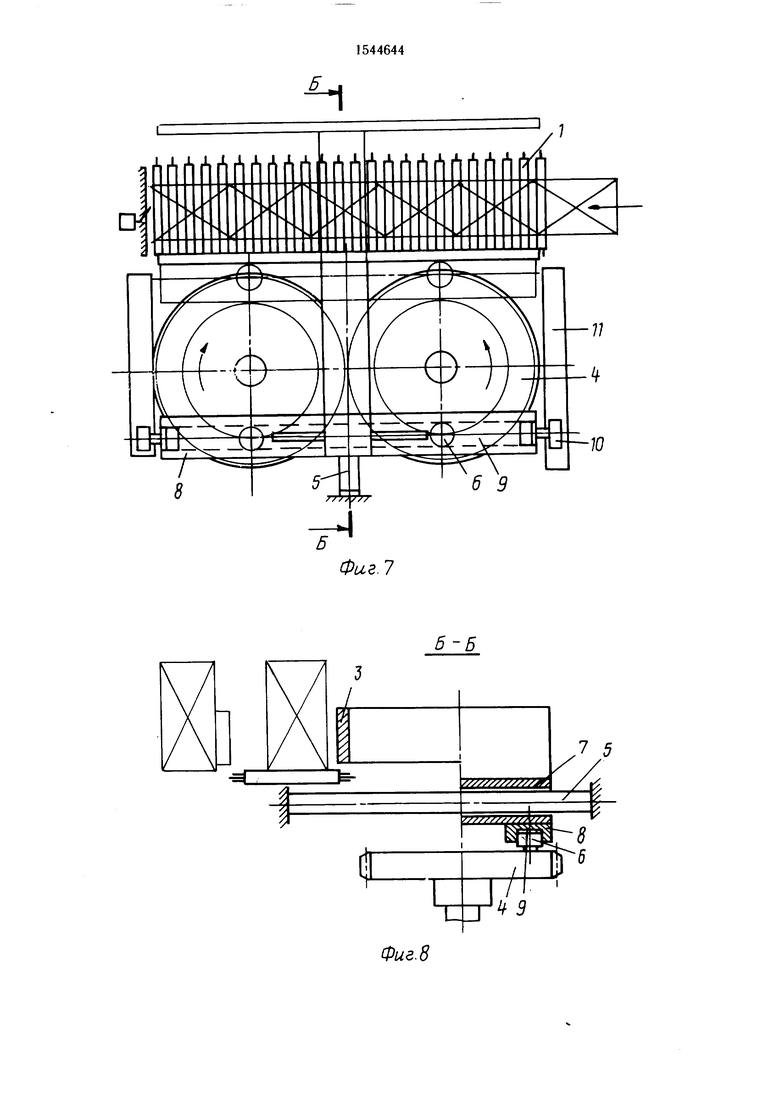
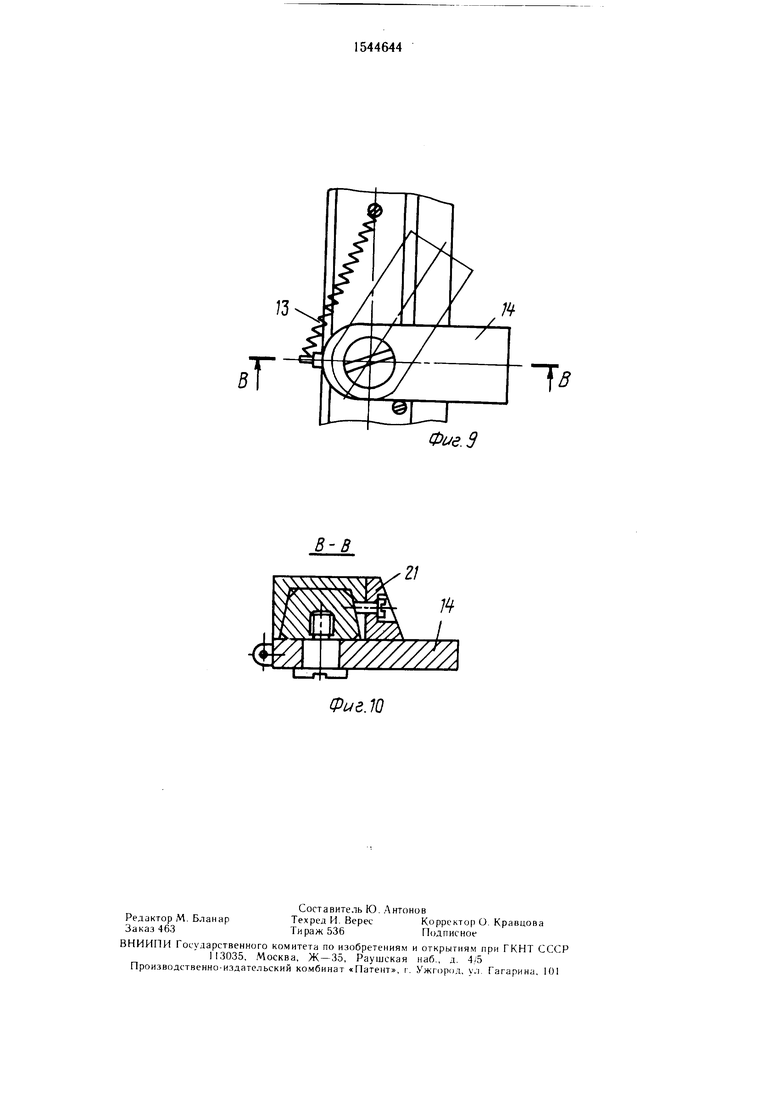
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - - механизм подъема контейнера, вид спереди; на фиг. 3 -- то же, вид сверху; на фиг. 4 - механизм формирования ряда изделий; на фиг. 5 - разрез А-А на фиг. 4; на фиг. 6 - толкатель ряда изделий с приводом; на фиг. 7 - то же, вид сверху; на фиг. 8 - разрез Б-- Б на фиг. 7; на фиг. 9 - подпружиненный откидной упор, вид сверху: на фиг. 10 - разрез В-В на фиг. 9
Устройство для загрузки контейнеров изделиями, преимущественно прямоугольной формы, содержит механизм формирования ряда изделий, включающий подающий транспортер (рольганг) 1, упор 2, толкатель 3 ряда изделий с приводом в виде кривошип- но-ползунного механизма с двумя кривошипами 4, который может включать, например, горизонтальный шток 5, расположенный равноудаленно между кривошипами 4, выполненными в виде шестерен, смонтированных с возможностью зацепления между собой, на каждой из которых может быть закреплен палец 6, связанную с ползуном 7 и расположенную перпендикулярно штоку 5 рамку 8 с пазом 9 для размещения в нем пальцев 6 кривошипов 4 и опорными роликами 10 на концах, и две параллельные штоку 5 направляющие 11 для взаимодействия с опорными роликами 10 рамки 8, а его ползун 7 смонтирован на штоке 5. Механизм формирования ряда изделий со; держит также отсекатель, выполненный в виде двух бесконечных приводных ремней 12 с
сд
4Ь 4ъ О 4ъ
параллельными рабочими ветвями, расположенными по обе стороны подающего транспортера (рологанга) 1 для создания интервала между подаваемыми изделиями и сформированным рядом Устройство содержит механизм подъема контейнера, который мо жет быть снабжен смонтированными с возможностью поворота в горизонтальной плос кости посредством взаимодействия с опор ными элементами подаваемого на загрузку
При подъеме каретки 18, перемещающейся роликами 19 по направляющим 20Г контейнер сначала центрируется ловителями 21, устанавливается на утапливаемых несущих упорах 14 и далее поднимается вмес- 5 те с кареткой 18 до первой позиции а- грузки
Остановка каретки происходит при помощи датчика 22, взаимодействующего с флажком 23, закрепленным на винте 24 подъема
контейнера подпружиненными пружинами 13 ю контейнера После этого включается меха- откидными утапливаемыми несущими упо-низм укладки и лента 25 перемещается со
рами 14, а также датчики 15 и 16 и фла-слоем изделий внутрь контейнера, а затем
при обратном ходе убегающего ролика ленты 25 происходит спадание изделий на дно
жок 17
Механизм подъема контейнера может включать каретку 18 с роликами 19, пере мешающимися по направляющим 20, и лови тели 21 контейнера, а также датчик 22 и флажок 23, закрепленный на винте 24, у прав ляющем работой механизма подъема механизм укладки изделий, включающий в себя
15
контейнера После загрузки одного ряда изделий контейнер приподнимается на iuai, a в это время происходит набор следующего слоя изделий и процесс повторяется
Пос ie всего контейнера каретка 18 опускается в крайнее нижнее пололенту 25 с убегающим роликом На роть 20 жсние, причем в конце хода контейнер ос- ганг изделия поступают с конвейера 26
Устройство работает следующим образом
Изделия по конвейер 26 к механизму формирования ряда, захваты ваются ремнями 12 и подаются по непри водному рольгангу 1 и изделия по нсм проталкиваются постедующими изделиями ю упора 2 После сформирования ря id изделий (без определения их количества) о чем сигнализирует датчик 15, происхошт
25
танав швается, достигая своими опорными -I юментами полотна, а упоры 14 освобож- 1аются от взаимодействия с контейнером и оетанав жваюгся в промежутке между рамкой контейнера и уровнем полотна механизма гкыачи контейнера Затем включается механизм рогачи контейнера и выводит 1р женый контейнер с позиции загрузки, при STOM поры 14 отклоняются при прохождении контейнера, а затем снова возосгановка ремней 12 отсекателя механизма до вращаются пружинами 13 в исходное полоформирования ряда Таким образом, сфор мированный ряд освобождается от дав 1ения постедующих изделий и включается тол катель ряда изделий, ста ткивающии их на пент 25 механизма укладки изделии
/кение
Формула изобретения
I Устройство для загрузки контейнеров и ечиями преимущественно прямоугольной
При повороте зацепляющихся отна с 35 Ф°РМЬ|. содержащее механизм формирования
шестерен кривошипов 4 закретен ные на них пальцы 6 начинают оано временное контактирование с паюм Q рам ки 8, укрепленной на 7 тоткатетя 3 В рез льтате усилие от привода на толка теть 3 передается равномерно в дв ка, равноу ааленных от оси перемещения Поэтому иск 1ючается всякая возможность перекосов и заеданий Причем толкатель пе ремешается по штоку 5, а ролики 10, за
ряда издетий, включающий подающий транспортер, упор, толкатель ряда изделий с при- воюм и отсекатель, и механизмы подъема контейнера и кладки изделий, отличающее- i ч тем что, с целью повышения надеж- точ 40 ностн в работе, отсекатель механизма формирования ряда изделий выполнен в виде бесконечных приводных ремней с параллельными рабочими ветвями, расположенными по обе стороны подающего транс- крепленные на рамке 8. контактир ют при портера для создания интервала между движении толкателя 3 с направляющими 11,подаваемыми изделиями и сформированным
рядом а привод толкателя ряда изделий выполнен в виде кривошипно-ползунного механизма с двумя кривошипами
2 Устройство по п 1, отличающееся тем,
не допуская его разворота Сталкивание ряда изделий происходит при повороте шее терен на 180° при повороте их на щие 180° происходит возврат толкателя 3
в исходное положение и остановка его с 50 что кривошипно-ползунный механизм привопомошью датчика 16, срабатывающего от флажка 17
Порожний контейнер подают на пози цию загрузки При заходе контейнера в ме ханизм подъема отклоняются утапливаемые упоры 14 при контакте с опорных элементов . контейнера и возвра шаются пружинами 13 в исходное положение
да толкателя ряда изделий включает горизонтальный шток, расположенный равноудаленно между кривошипами, выполненными в виде шестерен, смонтированных с возможностью зацепления между собой, на каждой ними нижних 55 из которых закреплен палец, связанную с ползуном и расположенную перпендикулярно штоку рамку с пазом для размещений в
При подъеме каретки 18, перемещающейся роликами 19 по направляющим 20Г контейнер сначала центрируется ловителями 21, устанавливается на утапливаемых несущих упорах 14 и далее поднимается вмес- те с кареткой 18 до первой позиции а- грузки
Остановка каретки происходит при помощи датчика 22, взаимодействующего с флажком 23, закрепленным на винте 24 подъема
контейнера После этого включается меха- низм укладки и лента 25 перемещается со
контейнера После загрузки одного ряда изделий контейнер приподнимается на iuai, a в это время происходит набор следующего слоя изделий и процесс повторяется
Пос ie всего контейнера каретка 18 опускается в крайнее нижнее положсние, причем в конце хода контейнер ос-
жсние, причем в конце хода контейнер ос-
танав швается, достигая своими опорными -I юментами полотна, а упоры 14 освобож- 1аются от взаимодействия с контейнером и оетанав жваюгся в промежутке между рамкой контейнера и уровнем полотна механизма гкыачи контейнера Затем включается механизм рогачи контейнера и выводит 1р женый контейнер с позиции загрузки, при STOM поры 14 отклоняются при прохождении контейнера, а затем снова воз/кение
Формула изобретения
I Устройство для загрузки контейнеров и ечиями преимущественно прямоугольной
нем пальцев кривошипов и опорными роликами на концах, и две параллельные штоку направляющие для взаимодействия « опорными роликами рамки, а его ползун смонтирован на горизонтальном штоке.
3. Устройство по п. 1, отличающееся тем, что, с целью повышения удобства в обслуживании, механизм подъема контейнера снабжен смонтированными с возможностью поворота в горизонтальной плоскости посредством взаимодействия с опорными элемен- тами подаваемого на загрузку контейнера подпружиненными откидными утапливаемыми несущими упорами.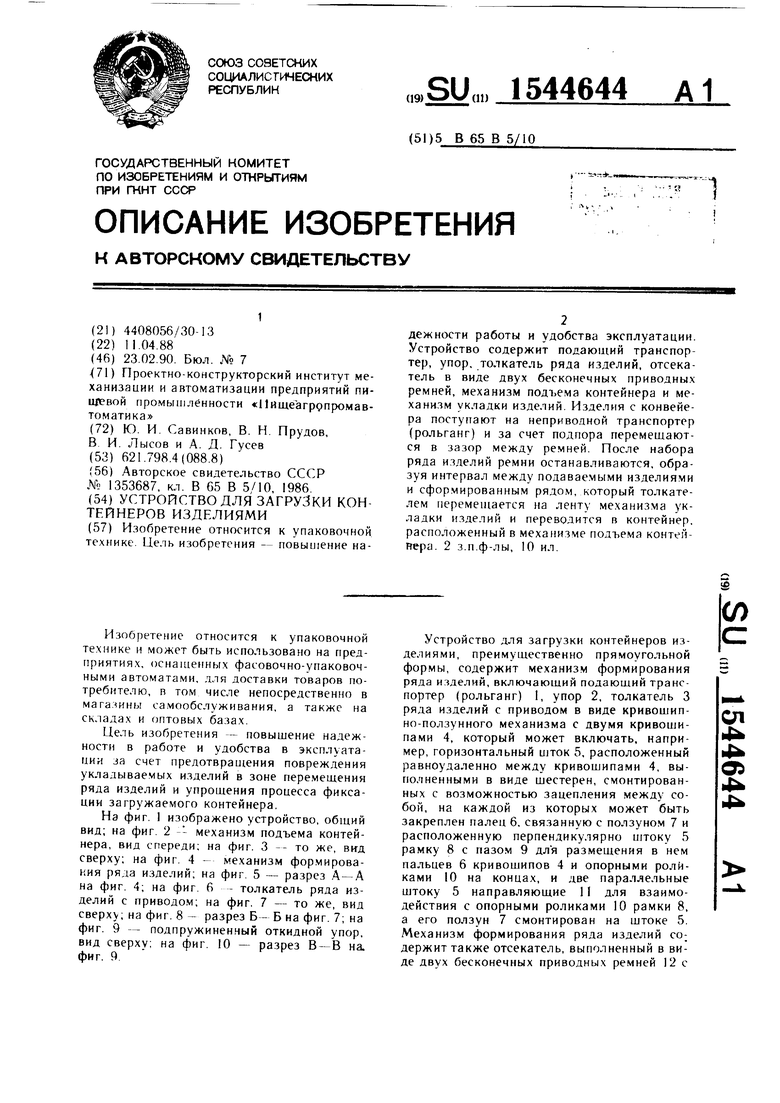
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки в контейнер штучных изделий | 1990 |
|
SU1757957A1 |
| Устройство для послойной укладки изделий в тару | 1986 |
|
SU1406030A1 |
| Устройство для подачи плоских предметов | 1978 |
|
SU749664A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Промышленный робот | 1979 |
|
SU770785A1 |
| Установка для укладки строительных из-дЕлий B КОНТЕйНЕРы | 1979 |
|
SU850398A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство для укладки цилиндрических изделий в тару | 1981 |
|
SU1043070A2 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611834A2 |
| Устройство для вырубки интегральной схемы из выводной рамки | 1982 |
|
SU1061890A1 |
Изобретение относится к упаковочной технике. Цель изобретения - повышение надежности работы и удобства эксплуатации. Устройство содержит подающий транспортер, упор, толкатель ряда изделий, отсекатель в виде двух бесконечных приводных ремней, механизм подъема контейнера и механизм укладки изделий. Изделия с конвейера поступают на неприводной транспортер /рольган/ и за счет подпора перемещаются в зазор между ремней. После набора ряда изделий ремни останавливаются, образуя интервал между подаваемыми изделиями и сформированным рядом, который толкателем перемещается на ленту механизма укладки изделий и переводится в контейнер, расположенный в механизме подъема контейнера. 2 з.п. ф-лы. 10 ил.
(риг 1
Фие.2
Ј Мф
H9frKI
А-А
12
k
11
Фие.5
у
8 nrv10
9 6
Фие.6
g
съ OQ
00
Ј
XJ
-f
СП
CT
.
Фиг. Ю
Фие.9
п
W//////A
| Устройство для загрузки контейнеров изделиями | 1986 |
|
SU1353687A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
