1
Изобретение относится к области автома|тнческого управления и может быть испопь эовано в станкостроенЕН.
. Известны пневмогшфавлическве позвошовше устройства, содержащие блок задания программы, логический блок, пневмогшфс преобразовательв гадропрввод, сввзвняый с рабочим станка, в которых точное 1Гозииионированне обеспечивается с помощью селекторного блока, управляемого сигналами блока заданияпрограммы
Нанболее блнзкймК предлагаемому является устройство, содержащее блок задания программы, соединенный с первым входом логического блока, преобразователем цифрового кода в перемещение и через регулятор дав- ления с одним из входов пневмогидропреобразователя, выход которого соединен со вторым входом логического блока и гидроприводом,, связанным с pa6o4H i органом, на котором закреплена заслонка, расположенная между входнымН и выходными соплами датчика обратной связи f2j.
Недостатком известных устройств являет ся СЛОЖНОСТЬ нх конструкции. Целью изобретення $шляется упрощение устройства. Цель достигается тем, что в предлагаемом устройстве установлены элементы И, ИЛИ, входы которых соединены с выходами элементов И, а шход fcoefliraeH с другим входом пневмогндропреобразователя. первые входы элементов И соединены с соответствующими выходами блока задания программы и входными соплами датчика обратной связи, закрепленного на преобразователе цифрового кода в перемещение, а выходные сопла датчика обратной связи соеданены с вторыми входами элемектой И
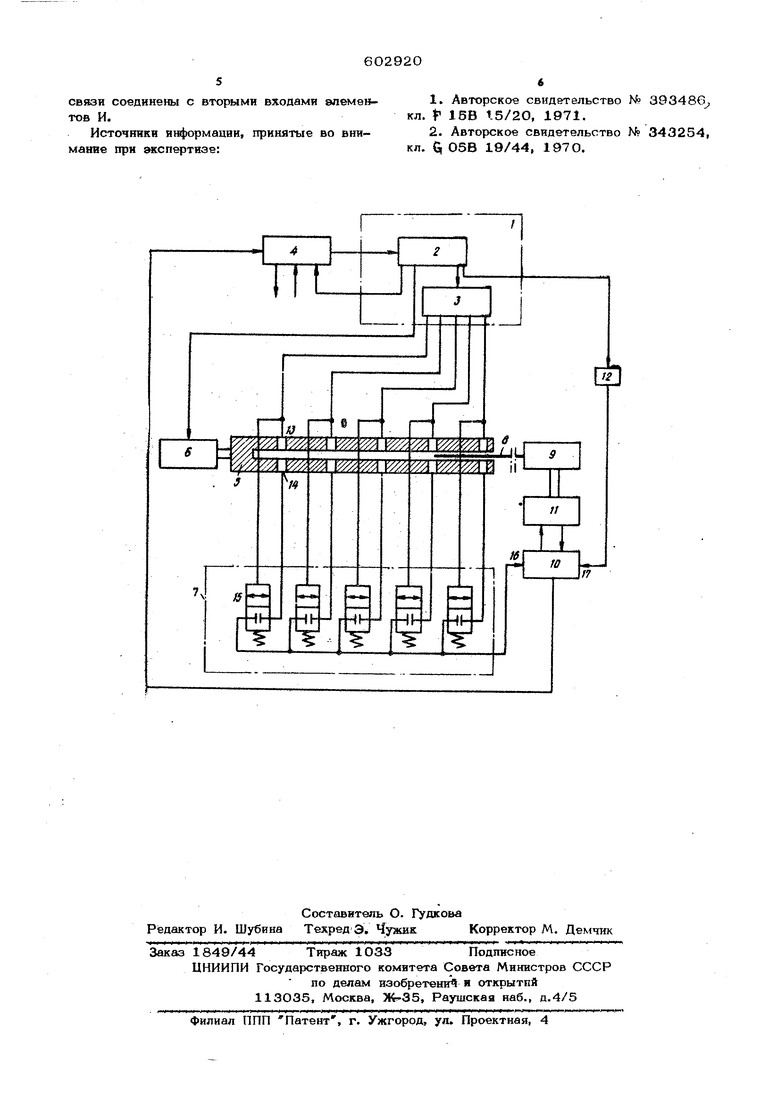
На чертеже показана схема предлагаемого нневмогидравлвческого позиционного устройства ДЛЯ программного управления.
Устройство включает в себя блок задания программы 1, состоящий из считывающего устройства 2 н деши4чзатора 3, логический блок 4, датчик обратной связи, состоящий вз измерительной шкалы 5, преобразователя цифрового кода в линейное перемещение 6, схему 7, состс.пиУю из элементов И, ИЛИ, заслонку 8, закрепленную на рабочем органе 9, пневмогндропреобразователь 10, соединенный с гидроприводо1у1 Ц, перемещающим рабочий орган, и регулятор давления 12. Попарно-соосные входные сопла 13 соединены с выходами деи1И()атора 3, а выхо. ные сопла 14 подключены ко входам cxptvibi элементов И и ИЛИ. Схема элементов И и ИЛИ выполнена на базе двухлинейныхклапанов 15, выходы кото рых объединены в один соединенный со входом 16 нневмогидропреобразоватедя, имеющего также вход 17. . Устройство работает следующим образом. Программа работы станка, записанная на, перфоленте, считывается с помощью считывак щего устройства 2. Информация со счить1вак щего устройства поступает в преобразователь ци4рового кода в перемещение 6, к логическому блоку 4 через регулятор давления 12, который обеспечивает получение опорного оигУйла для пневмогидропреобразователя путе пониже1шя давления на входе считывающего усфойства и поддержи ает его постоянным, на. вход 17 пневмогидропреобразователя, через дешифратор 3 - на одно из входных со nefl 13 измерительной шкалы 5 и в камеру управления соответствующего двухлинейного клапана 15. Преобразователь цифрового кода в перемещение смещает измерительную шкалу 5 на заданную величину относительно заслонки 8. Положение заслонки относительно входног сопла, йа которое подан сигнал от дещифрато определяет направлб1ше движения ствола. Если заслонка не перекрывает сопло 13, то, струя воздуха, вытекающа55 из него, беспрепятственно .попадает в сопло 14 и далее че. рез открйлый клапан 15 собирательной сх&мы поступает на вход 16 пневмогидропреобразователя. . Положение следящего золотника пневмогй/фопреобразователя, а следовательно, и перемещение рабочего органа зависит от соотношения уровня давлений управляющих сигналов на его входах 16 и 17. Наличие одновременно двух сигналов на входах 16 и 17 вызывает перемещение рабочего органа и заслонки влево до тех hop, пока заслонка не начинает перек{й 1вать заданную струю воздуха на измерительной шкале 5, в результате чего давление на вхо де 16 -пневмогидропреобразователя начинает падать и , в момент, когда его уровеи становится равным уровню опорного сигнала на входе 17, следящий золотнрк -пневмогид- ропреобразователя занимает среднее положе кие, перекрыв слив и подачу давления на гидропривод 11 и одновременно выдав сягнэ логическому блоку 4 на замедление скороо ти движения рабочего органа 9 путем дрооселирования потока жидкости, поступающего в гидропривод. После нескольких колебаний относительно заданного положения, вызванных действием инерционных сил,рабоч1гй орган останавливается. Если заслонка в исходном положении перекрывает заданную струю, то на вход 16 пневмогидронреобразователя сигнал не поступает. Наличие одного опорного сигнала на входе 17 вызывает переключение пневмогидропреобраэовагеля, соответствующее перемещение рабочего органа 9 и заслонки 8 вправо. Перемещение вправо происходит до тех пор, пока заслонка не отк;:Ь1аает входное сопло и заданная струя не поступает через соотвеэчзтвующее выходное сопло и клапан собирательной схемы на вход 16 пневмогидропреобразователя. Вновь образуется контур, следящий за положением заслонки, как и при перемещении влево, ирабочий орган останавливается в заданном положении. Для получения высокой точности позиционщэования и повторяемости сопла на измерительной щкале должны быть установлены с высокой точностью. Уровень опорного сигнала и сигналов, подаваемых ко входным соплам датчика, должен быть стабильным. Такое выполнение устройства снижает трудоемкость его изготовления на 2О - 25%, что обеспо.. чивает значительный экономический эффект. Формула изобретения Пневмогидравлическое позиционное устройтво для программного управления, содержащее лок задания программы, соединенный с перым входом логического блока, преобразоваелем цифрового кода в перемещение и через егулятор давления с одним из входов пневогидропреобразователя, выход которого , оединен со вторым входом логического блоа и гидроприводом. Связанным с рабочим рганом, на котором закреплена заслонка, асположенная между входными и ылходными соплами датчи1 а обратной связи, о т л и ч ftю ш е е с я тем, что, с целью упрощения уетроЛч ства, в нем установлены элементы И, ИЛИ, вкояы кояорых соединены с выходами элементов И, а выход соединен с другим входом пневмогидропреобразователя, первые входы элементов И соединены е соотеетс.твующими выхоойми блока задания Программы и входными соплами датчика обратной связи, закрепленного на преобразователе цифрового кода в перем&швние, а выходные сопла датчика обратной
связи соединены с вторыми входами элементов И.
Источники И1ф5рмации, принятые во внимание при спертиэе:
1.Авторское свидетельство № 393486 кл. Г 16В 1-5/20, 1971.
2.Авторское свидетельство № 343254, кл. Q О5В 19/44, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТРУЙНАЯ ЦИФРОВАЯ | 1967 |
|
SU205102A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Устройство индикации и управления для станков | 1985 |
|
SU1287112A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПОЗИЦИОННОГОУПРАВЛЕНИЯ | 1972 |
|
SU343254A1 |
| Цифровая система программного управления | 1979 |
|
SU883868A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство индикации и управления для станков | 1985 |
|
SU1290262A1 |
| ЦИФРОВАЯ ПНЕВМОГИДРАВЛИЧЕСКА: ПРОГРАММНО-СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU428359A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровой электрогидравлический привод | 1979 |
|
SU823665A1 |
