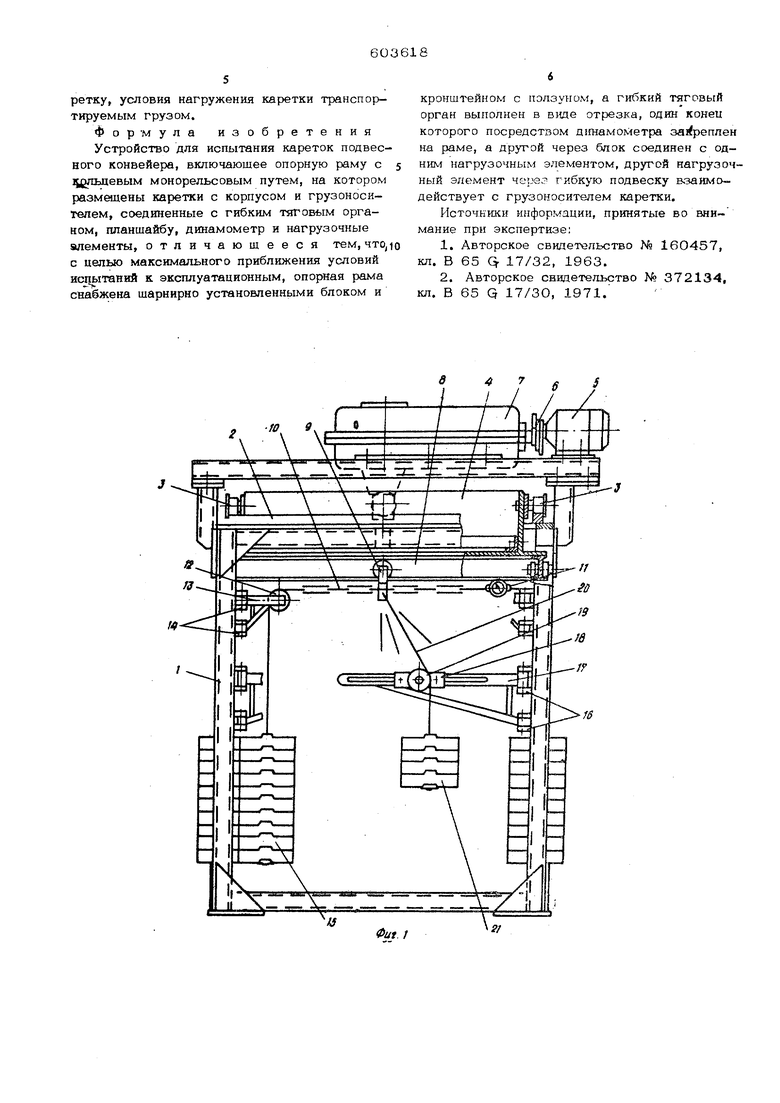
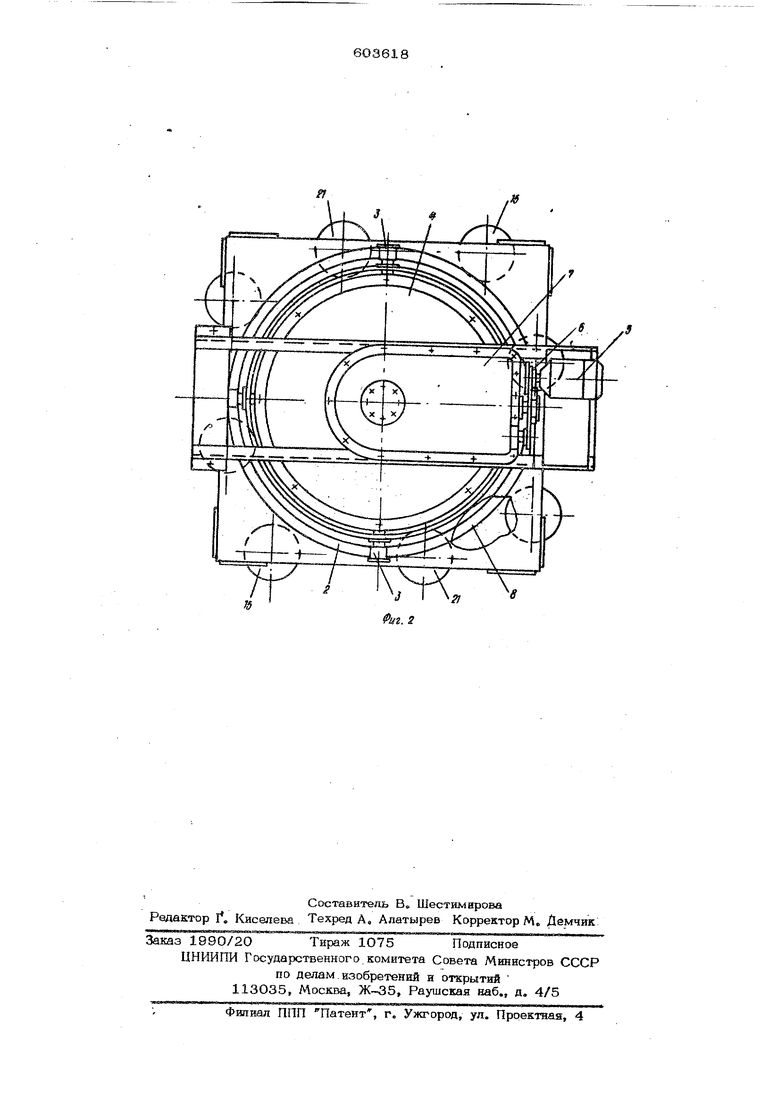
На фиг. 1 изображено описываемое устройство, вид сбоку; на фиг, 2 - то же, вид сверху.
Устройство состоит из опорной рамы 1 с горизонтальным кольцевым путем 2, на кото рый катками 3 опирается планшайба 4, при водимая во вращательное движение электродвигателем 5 через клиноременную передачу 6 и редуктор 7. С нижней стороны планшайбы 4 закреплен ходовой путь 8 в ввде замкнутого в горизонтальной плоскости копьаа для установки испытуемой каретки 9.
Испытуемая каретка Э псюадачнйм местом соединяется с горизонтальным отрезком тягового органа 10 (так же как и на реаль НОМ подвесном конвейере), один конец которого прикреплен через динамометр 11 к опорной раме 1,а другой конец огибает блок 12на кронштейне 13, прикрепленном к опорной раме на вертикальном шарнире 14, и соединен с нагрузочным элементом 15,. имитирующим натяжение тягового органа подвесного конвейера. Крепление тягового органа 10 н шарнира 14 кронштейна 13 на опорной раме 1 выполненотак, чтобы при натяжении тяговый (ган располагался по касательной к оси ходового пути 8 в месте расположения испытуемых кареток 9. В случае испытания каретки с боковым креплением тягового органа его крепление и крепление шарнира 14 на раме 1 должны быть смещены на величину асимметричности. На ртойке опорной рамы 1 на вертикальном шарнире 16 закреплен кронштейн 17 с ползуном 18, несущем блок 19, К кронштей-. ну испытуемой каретаи 9 прикреплена гибкая подвеска 20, огибающая блок 19 и соединенная с нагрузочным элементом 21, имитирующим вес груза транспортируемого кареткой подвесного конвейера. Передвижением ползуна 18 с блоком 19 по кронштейну 17 меняется угол между гибкой подвеской 20 и ходовым путем с (ТЯГОВЫМ органом 10, чем имитируется работа испытуемой каретки 9 под нагрузкой на участках ходового пути конвейе ра, располагаемых под тем ила иным углом к горизонту, В случае необходимости испытания каретки 9 При ее движении по горизонтальному хо довому пути отклонение блоком 19 гибкой подвески 2О не производится и нагрузочный элемент 21 располагается вертикально под кареткой 9. Грузовая каретка 9 снабжена датчиками (на чертеже не показаны), с помощью которых снимаются показания, например, о йефор маинй элементов кареток, их нагреве и др. Устройство работает следующим образом От электродвигателя 5 через клиноремен ную передачу 6 я редуктор 7 вращение пере
дается планшайбе 4 с ходовым путем 8. Величина скорости вращения может меняться многоступенчатыми шкивами клиноременной передачи 6. При вращении ходового пути 8 катки испытуемой каретки 9 получают возможность обкатываться, а неподвижное положение каретки позволяет снимать показания датчиков, например, о деформации конструктивных элементов, их температуре и др. в течение всего времени испытаний.
Необходимая нагрузка на испытуемую каретку 9 задается при помощи нагрузочных элементов 21. Величина ее может меняться в зависимости от количества подвешиваемо- го груза на гибкую подвеску 20. В случае испытана каретки 9 при имитации ее движения цо наклонным участкам ходового пути конвейера нагрузка на каретку прикладывается под утлом за счет отклонения гибкой подвески блоком 19. Угол отклонения от вертикали гибкой подвески 20 соответствует углу наклона пути к горизонту. Величина натяжения тягового органа 1О каретки 9 задается при помощи нагрузочных элементов 15 и при движении ходового пути 8 полностью имитируются условия п ередви- жения кареток реального конвейера. Сопротивление перекатывания кареток 9 по ходовому пути 8 определяется показаниями динамометра 11 при статическом и дишмическом состоянии системы каретки-хо. довой путь. Расположение блоков 12.-к 19 на кронштейнах 13 и 17, прикрепленных к опорной раме 1 на вертикальных шарнирах 14 и 16, способствует нормальному взаимодействию испытуемых катков каретки 9 с полками ходовогопути 8 при отклонении его размеров от правильной окружности. Это полностью имитирует условия взаимодействия катков кареток с полками ходового пути при допустимых отклонениях от прямолинейности. Предлагаемое устройство позволяет производить испытание каретки подвесного конвейера при имитации их движения как по гориз октальному, так и по наклонному ходовому пути; испытывать в условиях, приближенных к эксплуатационным, не только катки каретки, но и их кронштейны; одновременно испытывать несколько icapeTOK в разных условиях, eanprnviep при движении их по горизон- тральному и по наклонному ходовым путям, с разным натяжением тягового органа, с раз- ной нагрузкой на каретку; определять сопротивление перекатывания катков каретки по ходовому пути; максимально приблизить к реальным условиям взаимодейс-геия катков каретки с ходовым путем, условия крепления каретки с тяговым органом, условия передаваемых нагрузок от тягового оря-ана на каретку, условия нагружения каретки транспортируемым грузом.
Формула изобретения Устройство для испытания кареток подвесного конвейера, включающее опорную раму с Чйльцевым монорельсовым путем, на котором размещены каретки с корпусом и грузоносителем, соединенные с гибким тяговым органом, планшайбу, динамометр и нагрузочные элементы, отличающееся тем, с целью максимального приближения условий испытаний к эксплуатационным, опорная рама снабжена щарнирно установленными блоком и
кронштейном с пэлзуном, а гибкий тяговый орган выполнен в вице отрезка, один конец которого посредством Д1гаамометра загфеплен на раме, а другой через блок соединен с одним нагрузочным элементом, другой нагрузочный элемент чсреэ гибкую подвеску ваанк о- действует с грузоносителем каретки.
Источники информации, принятые во мание при экспертизе:
1.Авторское свидете/гьство № 160457, кл. В 65 О- 17/32, 1963.
2.Авторское свидетельство № 372134, кл. В 65 Q 17/30, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной грузонесущий конвейер | 1973 |
|
SU703435A1 |
| Спаренная каретка подвесного конвейера | 1980 |
|
SU933566A1 |
| Подвесной конвейер | 1982 |
|
SU1049373A1 |
| Каретка подвесного конвейера | 1984 |
|
SU1217733A1 |
| Подвесной пространственный конвейер | 1973 |
|
SU472872A1 |
| Устройство для испытания элементов конвейера | 1985 |
|
SU1298140A1 |
| Устройство для загрузки подвесного конвейера | 1982 |
|
SU1079560A1 |
| Подвесной конвейер | 1977 |
|
SU642242A1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| Подвесной грузонесущий конвейер | 1976 |
|
SU659465A1 |
to s
Jf.
0ut.l
«
