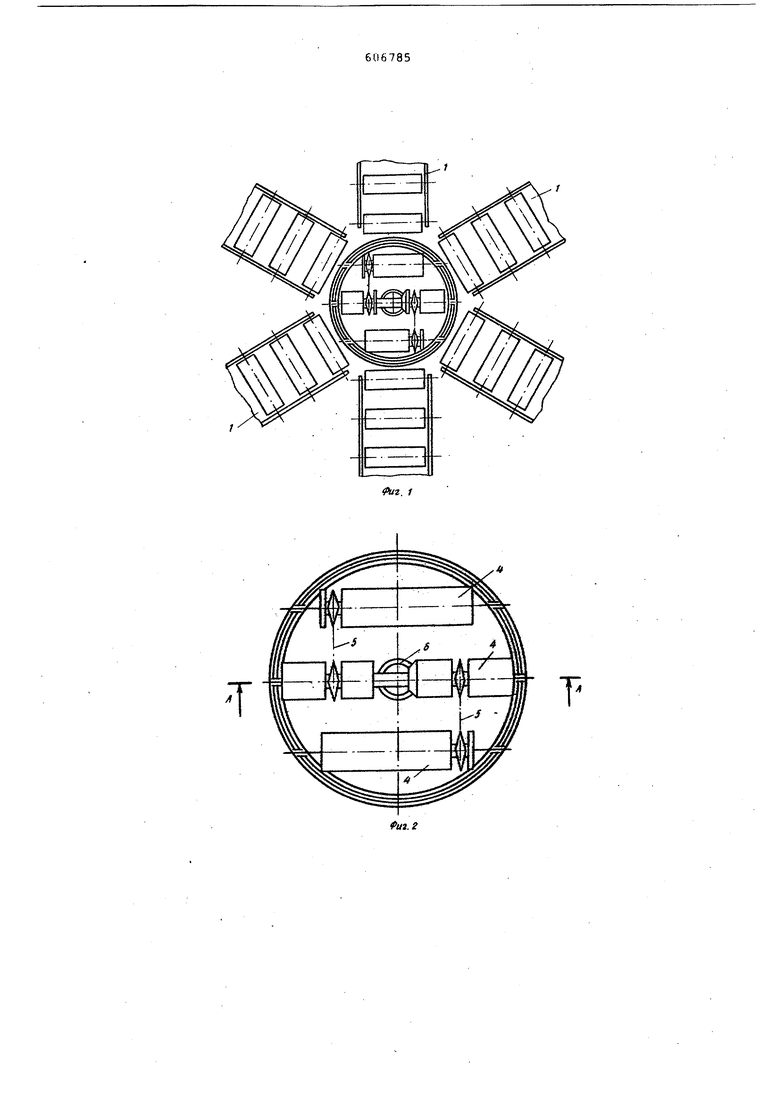
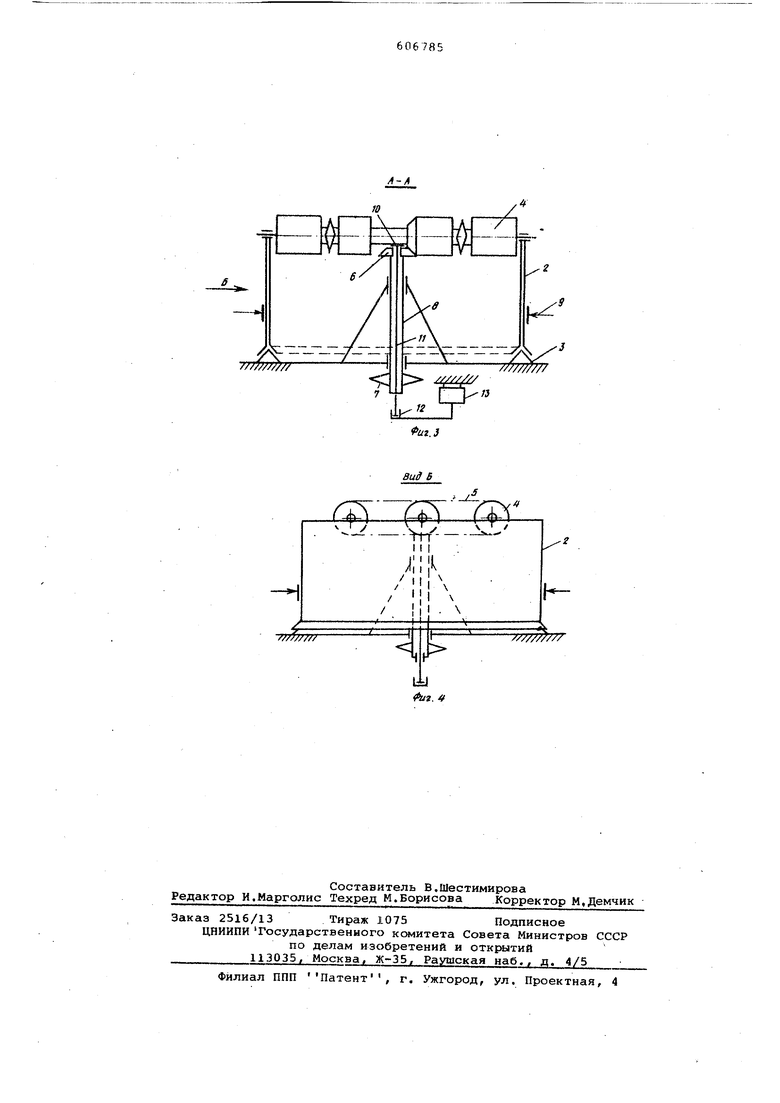
чатой передачей 6 со звездочкой 7, закрепленной на полом вертикальном валу 8. Одна из конических шестерен этой передачи жестко укреплена на вертикальном валу 8, а другая - на Валу среднего ролика рольганга. Звез-f дочка 7 соединена с приводом вращения (не показан). В частности, это может быть привод одного из конвейеров -1, В устройстве имеется два тормоза. Тор моз 9 установлен с возможностью взаимодействия с платформой 2. В.торой тормоз состоит из площадки 10 с фрикционной поверхностью, закрепленной на стержне 11, проходящем через полый вертикальный вал 8. Нижний конец стер ня 11свободно опирается на подпятник 12, соединенный с приводом 13 его вертиксшьного перемещения. Устройство работает следующим образом. Платформа 2 с роликами 4 в исходном положении установлена так, что ро лики 4 параллельны роликам подводящего конвейера. При этом стержень 11 с площадкой 10 находится в нижнем положении (вал среднего ролика расторможен) , а тормоз 9 фиксирует положение платформы 2 (платформа 2 заторможена) . От привода через звездочку 1 вал 8, коническую зубчатую передачу 6 вращение передается валу среднего ролика, а от него цепными передачами 5 остальным роликам 4. Груз, транспортируемый по одному из конвейеров, перемещается на ролики 4. Тормоз 9 отключают, а привод 13 включают. Платформа 2 растормаживается, а вал среднего ролика 4 затормаживается поднявшейся вместе со с-гержнем 11 площадкой 10. Вращение среднего (и других) роли ка прекращается. Но так как вал 8 про должает вращаться приводом, то платформа 2 вместе с роликами 4 поворачивается вокруг своей вертикальной оси, ведомая конической зубчатой передачей 6. После разворота платформы 2 (вместе с расположенным на роликах 4 грузом) на необходимый угол, зависящий от расположения отводящего конвейера, отключают привод 13 и включают тормоз 9. Вал среднего ролика растормаживается, и ролики 4 вновь начинают вращаться вокруг своих оред, перемещая груз на отводящий конвейер Платформа вместе с роликами 4 зафиксирована в это время тормозом 9, После окончания цикла путем переключения тормозов платформу разворачивают вновь в ее исходное положение, и цикл повторяется . Формула изобретения Устройство для передачи штучных грузов с одного конвейера на другие, расположенные под углом друг к другу, включающее приводную поворотную плат- форму, установленную на вертикальноговалу, на которой установлена приводная секция рольганга с роликами на валГазГ, щ е е- с -я тем; |Что, с целью сЬбеспечения возможности передачи штучных грузов на приемные конвейеры без реверса привода поворота платформы, привод поворота платформы выполнен в виде двух конических шестерен, одна из которых жестко укреплена на вертикальном валу, а другая - на. валу ролика рольганга поворотной платформы. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР 419452, кл. В 65 q 47/54, 1972. 2. Авторское свидетельство СССВ 212123, кл. В 65 Q 47/52, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU198225A1 |
| Поворотное устройство | 1989 |
|
SU1699877A1 |
| Устройство для разборки пакета штучных грузов | 1985 |
|
SU1350089A1 |
| Рольганг | 1978 |
|
SU763208A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Устройство для передачи штучных грузов | 1988 |
|
SU1518253A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| УСТРОЙСТВО для ПОДАЧИ ШТУЧНЫХ ГРУЗОВ | 1965 |
|
SU177334A1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |