1
Изобретение относится к медицинской технике, в частности к устройствам, используемым в качестве генератора механостимулов при исследовании биомеханическ11Х и физиологических свойств поперечно-полосатых мышц лабораторных животных.
Наиболее близким решением к изобретению по технической сущности и достигаемо му результату является механостимулятор, содержащий привод, плоский кулачок, подпружинеюсый толкатель с направляющей и роли- ком, рабочую тягу, соединенную с тодкателем посредством рычага, и куличный механизм LlJ.
Однако такой механостимулятор не обеспечивает генерирования механостимула в форме линейного растяжения с последукэщей мгновенной разгрузкой, а также достаточно высокой точности задания и воспроизведения характеристик в случае применения требуемой совокупности механостимулов.
Цель изобретения - расширение диапазона использования мех-аностимупятора за счет мгновенной разгрузки мышцы и повышение точнсх:ти исследования..
Цель достигается тем, что толкатель подпружинен, ролик установлен с возможностью перемещения .вдоль оси толкателя, при этом рабочая тяга выполнена из двух стержней, соединенных посредством гибкой тяги и дополнительного ролика с кулисным механизмом.
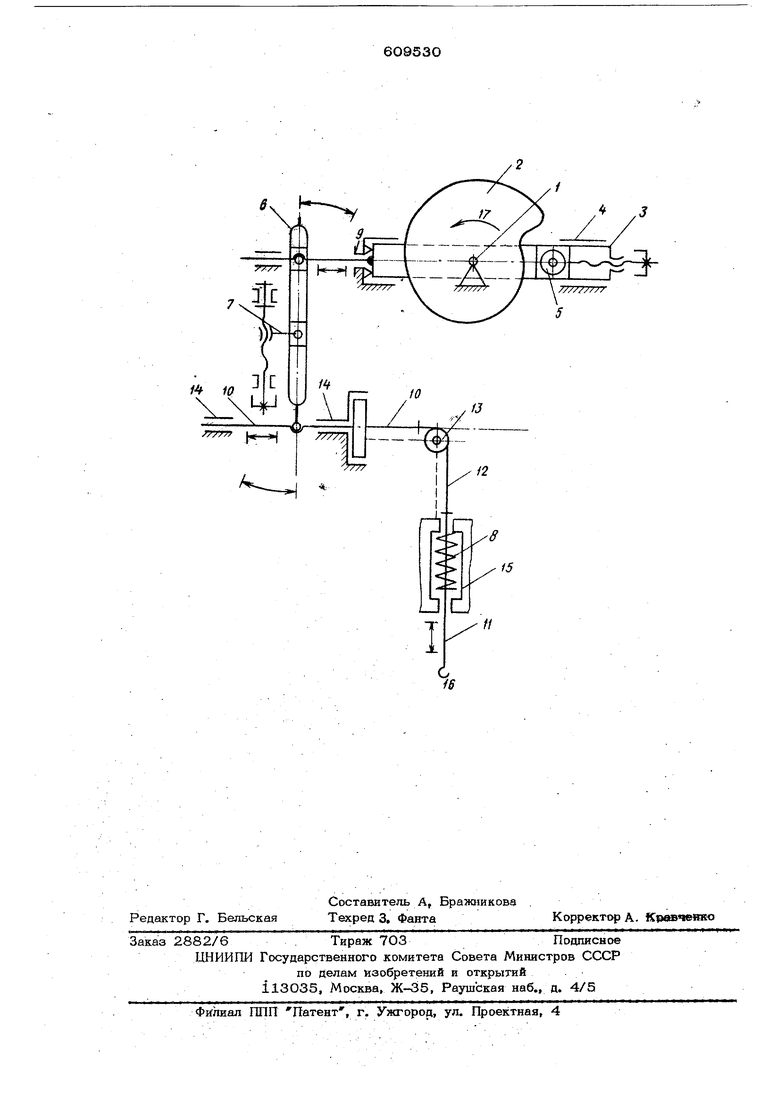
На чертеже дана кинематическая схема предлагаемого механостимулятора. Механостимулятор содержит привод с выxo ibiM валом 1, плоский кулачок 2, толкатель 3 с направляющей 4 и роликом 5, рабочую тягу, кулисный механизм с кулисой 6 и стойкой 7.
Толкатель 3 посредством пружины 8 через кинематическую цепь подпружинен к выступу 9 направляющей 4. Ролик 5 установлен с возможностью перемещения вдоль оси толкателя 3 с помощью механизма регулировки перемещения, выполненного в виде,, например, винтовой пары, размещенной в раке толкателя..
Рабочая тяга состоит из двух стержней 10 и 11, соединенных посредством гибкой тягн 12 и ролика 13 с кулисным механиам ом. Стержень 10 размещен в направляющей 14 пар-аллельно оси толкателя, а стержень 11 - в направлякялей 15, которая имеет возможность поворота вокруг осей ро/шка 13 и стержня Ю, Толкатель лосредством кулисы 6 кулисного механизма подвижно соединен со стерж нем 1О рабочей тяги. Стержень 11 оканчивается крючком 16 для привязки Х|ЫШЦЫ. Устройство работает следующим образом В случае частичной реализации заданной кулачком функции, когда ролик 5 в исходном положении не замкнут с кулачком 2, возвратно-поступательное движение рабочей тяги осушествляется следующим образом. При вращении и направлению стре)ши 17 кулачок 2, набегая на ролик 5 толкателя 3 замыкает со своей стороны кинек«атическую цепь преобразователя и, таким образом, запускает, движение той его части (толкательрабочая тяГ:д), которая осуществляет поступательное движение рабочей тяги под деист- вием восходящей чйсти рабочего участка профиля вращаемого кулачка 2 и возвратное движение до исходного положения под дейст вием пружины 8 по нисходящей части- рабочего участка профиля. В случае полной peaлизании заданной кулачком функции, когда замыкание цепи осуществляется со стороны ролика 5 с помощью механизма регулировки перемещения, возвратно-постуг ательное движение рабочей тяги осуществляется одно временно с вращением кулачка 2 Так как исходное положение кулачка 2 в пределах его холостого хода не связапо зависимостью с исходпым положением рабочей тяги, то опо в этих пределах может быть любым, а при необходимости задается. Действуя в направлении возвратного движения рабочей тяги, пружина 8 подпружинивает все взаимно С $язанные звенья кинематической цепи преобразователя, чем обеспечивает фиксацию исходного положения, а также выборку мертвых хоцов в кинематических парах. Посредством стойки 7 коэффициент передачи хода толкателя 3 может быть установлен равным единице. Ценой деления механизма регулировки перемещения ролика 5 толкателя 3 в этом случае можно пользоваться без пересчета, а также варьировать амплитуду механостимулов при тех же параметрах кулачка в более щироких пределах. Предлагаемый ме.чаностимулятор позволяет расширить диапазон использования и повысить точность, необходимую для исследования физиологических и биомеханических зависимостей при более адекватной стимуляции мыщц, которая заключается в совокупном повыщении точности задания и воспроизведения характеристик механостимулов по всей рассматриваемой, кинематической цепи. Это обеспечиваете:я, в частности, точностью задания амплитудь механостимулов с помощью механизма регулировки Г1еремеи епия, постоянством по;южения начала отсчета амплитуды механостимулов, неизменностью установленного коэффициента передачи хода толкателя при генерации на участке толкатель-рабочая тягп, однозначным направлением механостимулов. Точность предлагаемого механостимуля-тора в физиологических исследованиях позволяет стандартизировать все параметры механостнмуляции с высокой точностью воспроизведения,, возможность мгновенной разгрузки мыщцы при линейном законе ее растяжения дает возможность на больщом стаТИЧ6ЮКОМ материале оценить характеристики тормозных процессов, возникающих в мыщечных рецепторах, проанализировать при этом влияние амплитуды и скорости растяжения мыщцы на тормозные процессы в рецепторах, а также иЬследовать явление остаточной деформации мыщцы после разгрузки. Формула изобретения Механостимулятор, содержащий привод, плоский кулачок, подпружиненный толкатель с направляющей и роликом, рабочую тягу, соединенную с толкателем посредством рычага, и кулисный механизм, о т л и ч а и и с я тем, что, с целью расщирения диапазона использования механостимулятора и повышения точности исследования, толкатель подпружинен ролик установлен с возможностью перемещения вдоль оси толкателя, при этом рабочая тяга выполнена из двух стержней, соединенных посредством гибкой тяги и дополнительного ролика с кулисным механизмом. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 5073О9, кл. А 61 В 5/00, 1976. /4 W --Н 
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 2011 |
|
RU2475341C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| Привод рапир ткацкого станка | 1983 |
|
SU1201370A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1996 |
|
RU2125954C1 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2005 |
|
RU2278804C1 |
| УДАРНО-ПОВОРОТНЫЙ МЕХАНИЗМ | 1989 |
|
RU2039241C1 |
| ДЕСМОДРОМНЫЙ КУЛАЧКОВЫЙ ПРИВОД КЛАПАНА ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА С РЕГУЛИРОВКОЙ СТЕПЕНИ ОТКРЫТИЯ КЛАПАНА | 2020 |
|
RU2730196C1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |