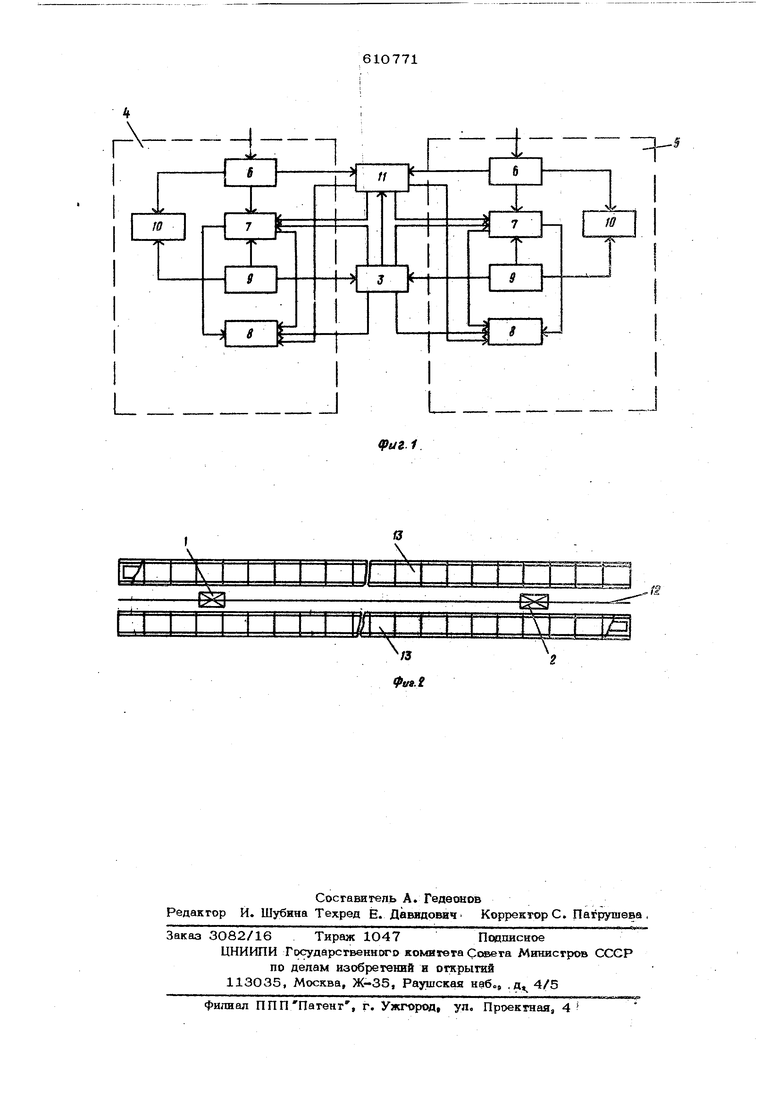
кранов-шгабеперов 1, 2 и схемы 4, 5 управления KpaHoi H-iuTaeenepoM, в каждую иэ которых включены пооледовагельно соединен ные блок 6 программы, блок 7 вектора скорости и блок 8 управления приводом, а также блок 9 датчиков, который подключен к блоку 7 вектора скорости и блоку 10 индикации,, который соединен с блоком 6 программы, а блок 3 ограничения сближения краноа-штабелеров связан с блоком управл ния приводом, блоком 7 вектора скорости ц блоком 9 датчиков, при этом система снабжена блоком 11 согласования, ко входам которого подключены выход блока 6 программы и выход блока 3 ограничения сближе ния кранов-штабелеров, а выходы блока 11 согласования подсоединены ко входу блока 8 управления приводом и входу блока 7 вектора скорости. Каждый кран-штабелер 1, 2 снабжен своей схемой 4, 5 управления, в каждой, из которых блок 6 программы предназначен для выбора режима работы и заданий адреса, блок 7 вектора скорости - для определения скорости и направления перемещения крана-штабелера, блок 9 датчиков - для вьй дачи информации о положении кранов-шгабвг Леров 1, 2, блок 10 отображает заданное и фактическое, положение крано&-штабелерор 1, 2, а блок 3 ограничения сближения кра-. нов-штабелеров 1, 2 контролирует наименьшее допустимое расстояние между кранами- штабелерами, Краны-штабелеры 1, 2 распопсякены на общих путях 12 на складе; между стеллажа-. ми 13.. Система управления кранами-шгабегеерами может обеспечить следующие режимы работы, В первом режиме краны-щтабепе1Я 1 1, 2 одновременно перемещаются в любом Hatb равлении, а расстояние между ними боль е минимально; допустимого, при этом блок 11 согласования и блок 3 ограничения сблй Ксения команд HV- выдают и краны- шгабелёр 1, 2 работают независимо один ог другм о. . Во втором режиме, например, кран- ытабе пер 1 должен попасть-в зону, находяиц юся аа неподвижным краном-штабелером 2. При Приближении крана-штабелера 1 к сГ1ящеMy крану-штабелеру 2 на минимально допуо тимое расстояние, блок 3 ограничения сближ ния выдает команду на перемещение крана- штабелера 2, который будет соверщать вь нужденный отход пика кран-штабелер 1 не окажется в заданной зоне, | В третьем режиме работы каждый кранштабепер должен переместиться в j30Hy, pat положеннуто за зоной другого крана-штабеhepa. При этом блок 11 согласования выдает команду на запрещение перемещения в блок 7 вектора скорости одного из крановштабелеров. Второй кран-шгабелер перемешается в зону и после окончания перегрузочных операций блок 11 согласования снимает команду запрета с блока 7 сгагласования первого крана-штабелера и он перемещаемся в заданную зону, дальнейшая работа крац-но&-щтабелеррв аналогична изображенной во втором режиме, В четвертом режиме каждый кра -штабвлер должен переместиться в зону, располОженную за другим краном-штабелером, В этом случае блок 11 согласования выдает команду на запрет перемещения в блок 7 вектора скорости одного из кранов-щтабеле ров. Дальнейшая работа аналогична изложен ной во втором и третьем режимах. Таким образом, система управления п&зволяет исключить аварийною-ситуации и повысить производительность кранов-штабелеров. Формула изобретения Система управления кранами-щтабелер - ми, расположенными на общих путях, соде{ жащая блок ограничения,сближения крано&штабеперов и схемы управления краномштабелер1 л,, в каждую из которых включены последовательно соединенные блок -программы, блок вектора скорости и блок упра&ления приводом, а также блок датчиков, когорьШ подключен к блоку, вектора скороога и блоку индикации, который соединен с блоком программы а блок ограничения сближения крано -щтабелеров связан с бло- KtM управпения приводом, блоком вектора в блоком датчиков, отличающаяся геы, что, с цепью повышения производительности и надежности работы кранов-шкабелеров, она снабжена блоком согласования/ ко входам которого подключены выход блока программы и выход блока ограничения сближения кранов-штабелеров, а выходы бл1жа согласования подсоединены ко входу блока управления приводом и вхсм ду блока вектора скорости. Источники информации, принятые во внимание при экспертизе: 1.Патент ФРГ № 1091727, кп. В 5В 3/16, 1961, 2.Авторское свидетельство СССР N 379918, кп, В 65 Сг 47/50, 1973, L 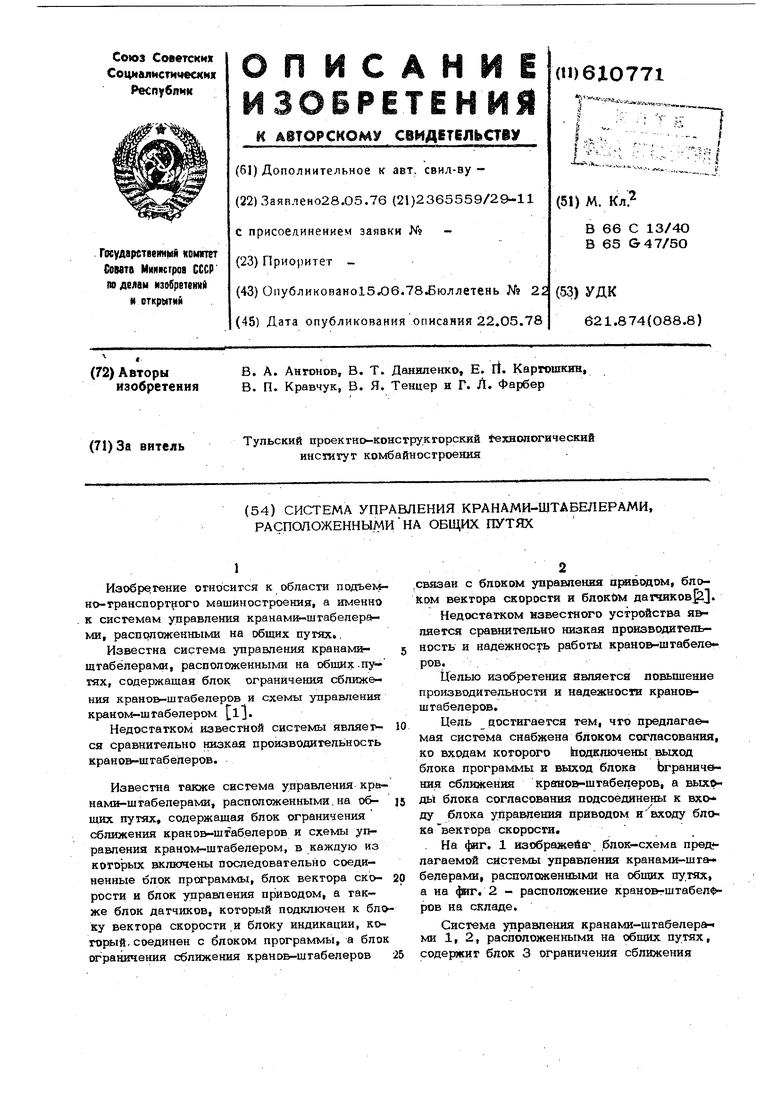
| название | год | авторы | номер документа |
|---|---|---|---|
| Система совместного управления кранами-штабелерами | 1983 |
|
SU1184766A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Автоматизированный склад для хранения пакетированных грузов | 1973 |
|
SU591360A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Устройство для регулирования движения погрузочных и транспортных единиц | 1977 |
|
SU746682A1 |
| Устройство телемеханики для рассредоточенных объектов | 1975 |
|
SU553647A1 |
| АВТОМАТИЗИРОВАННАЯ ПРОТИВОГРАДОВАЯ РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2370943C1 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |