(54) ПЛАНИРОВЩИК
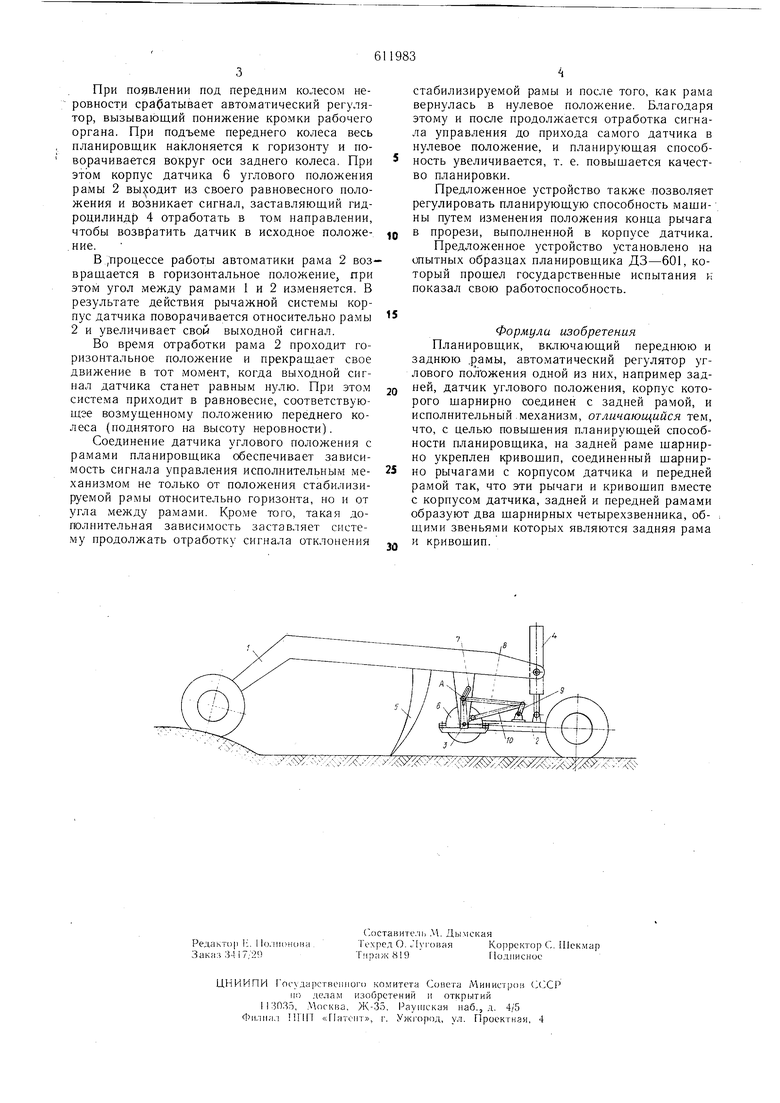
При появлении под передним колесом неровности сраОатывает автоматический регулятор, вызывакэщий понижение кромки рабочего органа. При подъеме переднего колеса весь планировщик наклоняется к горизонту и поворачивается вокруг оси заднего колеса. При этом корпус датчика 6 углового положения рамы 2 выводит из своего равновесного положения и возникает сигнал, заставляющий гидроцилиндр 4 отработать в том направлении, чтобы возвратить датчик в исходное положе.ние.
В ,Процессе работы автоматики рама 2 возвращается в горизонтальное положение, при этом угол между рамами 1 и 2 изменяется. В результате действия рычажной системы корпус датчика поворачивается относительно рамы 2 и увеличивает свой выходной сигнал.
Во время отработки рама 2 проходит горизонтальное положение и прекращает свое движение в тот момент, когда вы.ходной сигнал датчика станет равны.м нулю. При этом система приходит в равновесие, соответствующее возмущенному положению переднего колеса (поднятого на высоту неровности).
Соединение датчика углового положения с рамами планировщика обеспечивает зависимость сигнала управления исполнительным механизмом не только от положения стабилизируемой рамы относительно горизонта, но и от угла между рамами. Кроме того, такая дополнительная зависимость заставляет систе.му продолжать отработку сигнала отклонения
стабилизируемой ра.мы и после того, как рама вернулась в нулевое положение. Благодаря этому и после продолжается отработка сигнала управления до прихода самого датчика в нулевое положение, и планирующая способность увеличивается, т. е. повыщается качество планировки.
Предложенное устройство также позволяет
регулировать планирующую способность мащины путем изменения положения конца рычага
в прорези, выполненной в корпусе датчика.
Предложенное устройство установлено на опытных образцах планировщика ДЗ-601, который прощел государственные испытания и показал свою работоспособность.
Формула изобретения
Планировщик, включающий переднюю и заднюю ,рамы, автоматический регулятор углового положения одной из них, например задней, датчик углового положения, корпус которого щарнирно соединен с задней рамой, и исполнительный .механизм, отличающийся тем, что, с целью повыщения планирующей способности планировщика, на задней раме щарнирно укреплен кривощип, соединенный щарнирно рычагами с корпусом датчика и передней рамой так, что эти рычаги и кривощип вместе с корпусом датчика, задней и передней рамами образуют два щарнирных четырехзвенника, общими звеньями которых являются задняя рама
и кривощип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПЛАНИРУЮЩЕЙ СПОСОБНОСТИ ПЛАНИРОВОЧНЫХ МАШИН | 2010 |
|
RU2417286C1 |
| Планировщик | 1984 |
|
SU1252435A2 |
| Способ управления положением рабочего органа землеройной машины | 1982 |
|
SU1105576A1 |
| Землеройно-профилировочный агрегат | 1987 |
|
SU1532664A1 |
| Полуприцепной планировщик (его варианты) | 1983 |
|
SU1113481A1 |
| Планировщик | 1975 |
|
SU619592A1 |
| Планировщик | 1976 |
|
SU724643A1 |
| Планировщик | 1973 |
|
SU466863A1 |
| Устройство для обработки лещади доменнойпЕчи | 1979 |
|
SU831535A1 |
| Автоматизированный планировщик | 1979 |
|
SU815172A1 |
