(54) ТРЕХПОЗЩИОННЫЙ РАСПРЕДЕЛИТЕЛЬ
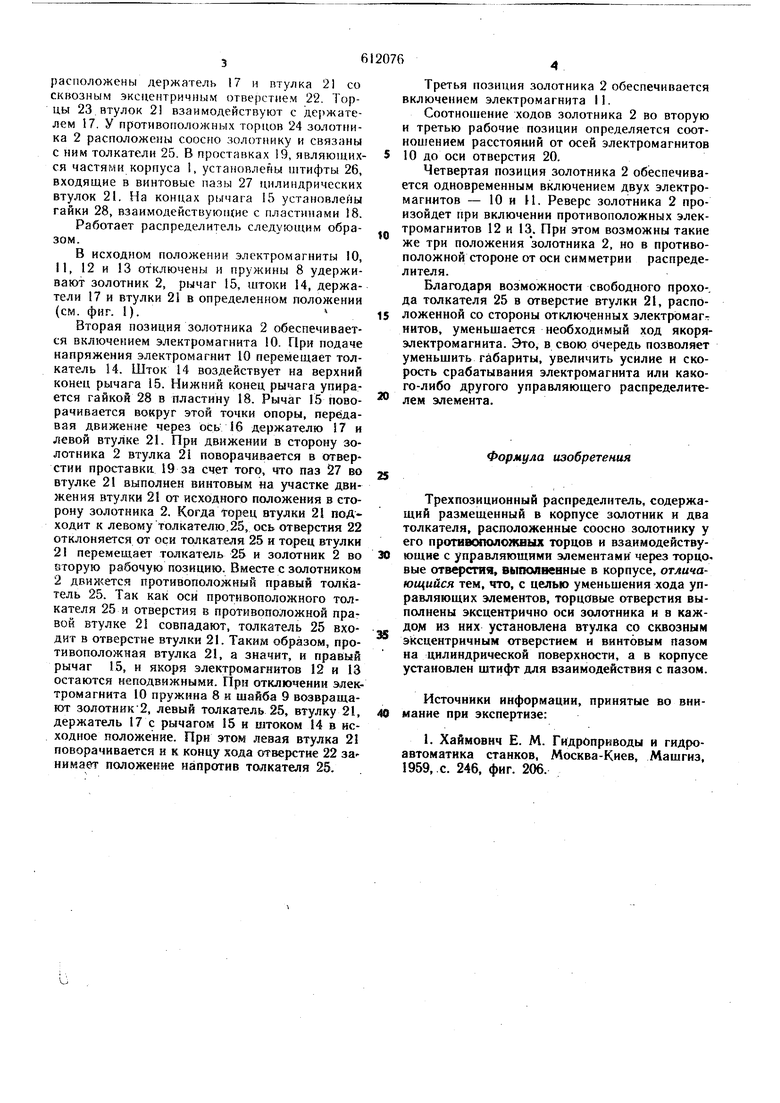
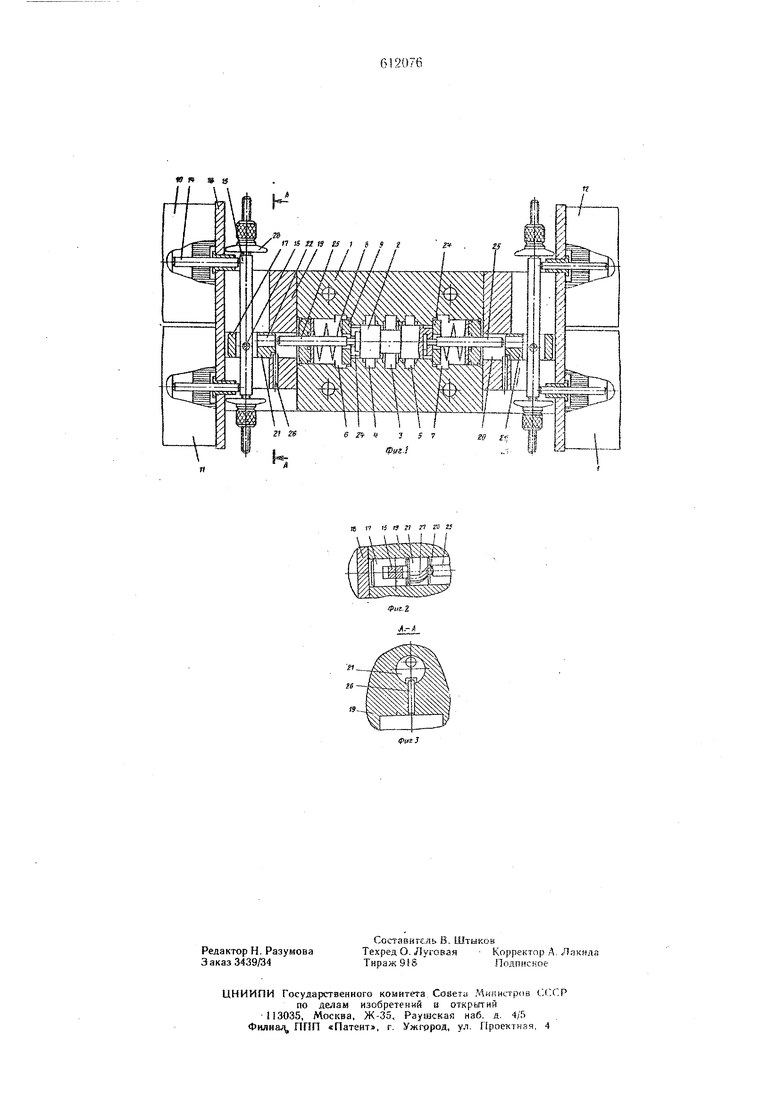
расположены держатель 17 и птулка 21 со сквозным эксцентричным отверстием 22. Торцы 23 втулок 2 взаимодействуют с держателем 17. У противоположных торцов 24 золотника 2 расположены соосно золотнику и связаны с ним толкатели 25. В проставках 19, являющихся частями корпуса i, установлены штифты 26, входящие в винтовые пазы 27 цилиндрических втулок 21. На концах рычага 15 установлены гайки 28, взаимодействую Цие с пластинами 18.
Работает распределитель следующим образом.
В исходном положении электромагниты 10, II, 12 и 3 отключены и пружины 8 удерживают золотник 2, рычаг 15, штоки 14, держатели 17 и втулки 21 в определенном положении (см. фиг. 1).
Вторая позиция золотника 2 обеспечивается включением электромагнита 10. При подаче напряжения электромагнит 10 перемещает толкатель 14. Шток 14 воздействует на верхний конец рычага 15. Нижний конец рычага упирается гайкой 28 в пластину 18. Рычаг 15 поворачивается вокруг этой точки опоры, передавая движение через ось 16 держателю 17 и левой втулке 21. При движении в сторону золотника 2 втулка 21 поворачивается в отверстии проставки 19 за счет того, что паз 27 во втулке 21 выполнен винтовым на участке движения втулки 2 от исходного положения в сторону золотника 2. Когда торец втулки 21 подходит к левому толкателю,25, ось отверстия 22 отклоняется от оси толкателя 25 и торец втулки 2 перемещает толкатель 25 и золотник 2 во вторую рабочую позицию. В месте с золотником 2 движется противоположный правый толкатель 25. Так как оси противоположного толкателя 25 и отверстия в противоположной правой втулке 21 совпадают, толкатель 25 входит в отверстие втулки 21. Таким образом, противоположная втулка 21, а значит, и правый рычаг 15, и якоря электромагнитов 12 и 13 остаются неподвижными. При отключении электромагнита 10 пружина 8 и шайба 9 возвращают золотник2, левый толкатель 25, втулку 21, держатель 17с рычагом 15 н штоком 14 в исходное положение. При этом левая втулка 21 поворачивается н к концу хода отверстне 22 за нимает положение напротив толкателя 25.
Третья позиция золотника 2 обеспечивается включением электромагнита II.
Соотнощение ходов золотника 2 во вторую и третью рабочие позиции определяется соотнощением расстояний от осей электромагнитов 10 до оси отверстия 20.
Четвертая позиция золотника 2 обеспечивается одновременным включением д.вух электромагнитов - 10 и И. Реверс золотника 2 произойдет при включении противоположных электромагнитов 12 и 13. При этом возможны такие же три положения золотника 2, но в противоположной стороне от оси симметрии распределителя.
Благодаря возможности свободного прохо-. да толкателя 25 в отверстие втулки 21, расположенной со стороны отключенных электромагт нитов, уменьшается необходимый ход якоряэлектромагнита. Это, в свою очередь позволяет уменьшить габариты, увеличить усилие н скорость срабатывания электромагнита или какого-либо другого управляющего распределителем элемента.
Формула изобретения
Трехпознционный распределитель, содержащий размещенный в корпусе золотник н два толкателя, расположенные соосно золотнику у его противоположвых торцов и взанмодействующие с управляющими элементами через торцовые отверстия, вьтолненные в корпусе, отличающийся тем, что, с целью уменьшения хода управляющих элементов, торцовые отверстия выполнены эксцентрично оси золотника и в каждом из них установлена втулка со сквозным эксцентричным отверстием и винтовым пазом на цилиндрической поверхности, а в корпусе установлен штифт для взаимодействия с пазом.
Источники информации, принятые во внимание при экспертизе:
1. Хаймовнч Е. М. Гидроприводы и гидроавтоматика станков, Москва-Киев, Мащгиз, 1959, с. 246, фиг. 206.
f 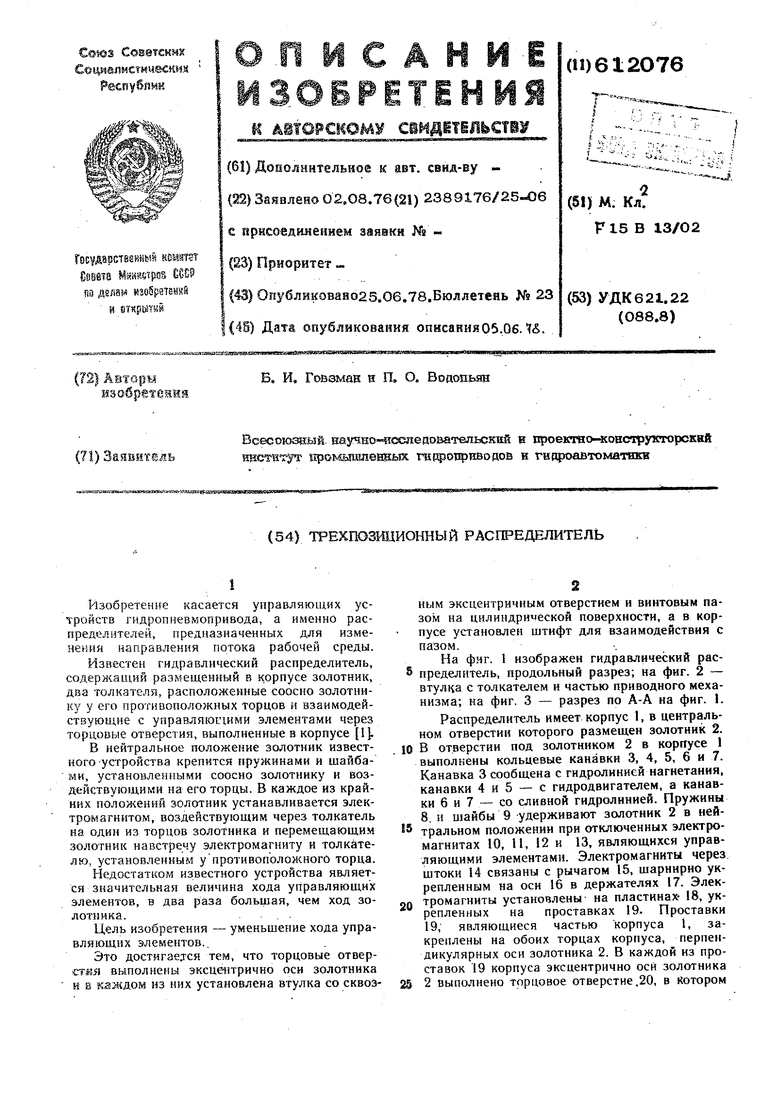
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления бесступенчатым механизмом поворота транспортного средства | 1991 |
|
SU1789405A1 |
| СТАНОК ДЛЯ УДАЛЕНИЯ ОБЛОЯ ФОРМОВЫХ РЕЗИНОВЫХИЗДЕЛИЙ | 1967 |
|
SU205269A1 |
| Цифровой привод | 1986 |
|
SU1333881A1 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| Устройство для вертикальной регулировки валка прокатной клети | 1986 |
|
SU1386322A1 |
| Устройство для измерения эксцентриситета вращающегося вала | 1974 |
|
SU744158A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 1992 |
|
RU2042575C1 |
| Устройство управления многоступенчатой трансмиссией | 1985 |
|
SU1369936A1 |
| Автомат для сверления поперечных отверстий | 1981 |
|
SU1007852A1 |
| Устройство дистанционного управления секцией механизированной крепи | 1984 |
|
SU1564362A1 |
га г7 ч а i п к- а
VLJ. М
- TTTTCVVXN C-.XNV
