(5) УСТРОЙСТВО для УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
1
Изобретение относится к робототехнике и может быть испйльзовано при создании дистанционных манипуля торов.
По основному авт. св. № 582960 известно устройство для управления дистанционным манипулятором, которое- содержит последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен ко входу первого сумматора, а также последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соединенные электропривод и датчик угла задающего органа подключен ко второму входу второго сумматора, второй выход гидропривода соединен со входом датчика угла исполнительного органа, а
ВЫХОД датчика момента подключен ко второму входу первого сумматора f1 ,
Недостатком этого устройства является его низкая надежность из-за возможности перегрева и выхода из строя электропривода.
Цель изобретения - повышение надежности устройства.
Цель достигается тем, что устройство содержит последовательно соединенные датчик тока, фильтр низкой частоты, преобразователь напряжения и блок умножения, через который выход первого сумматора подключен к входу усилителя, а вход датчика тока соединен со вторым выходом электропривода.
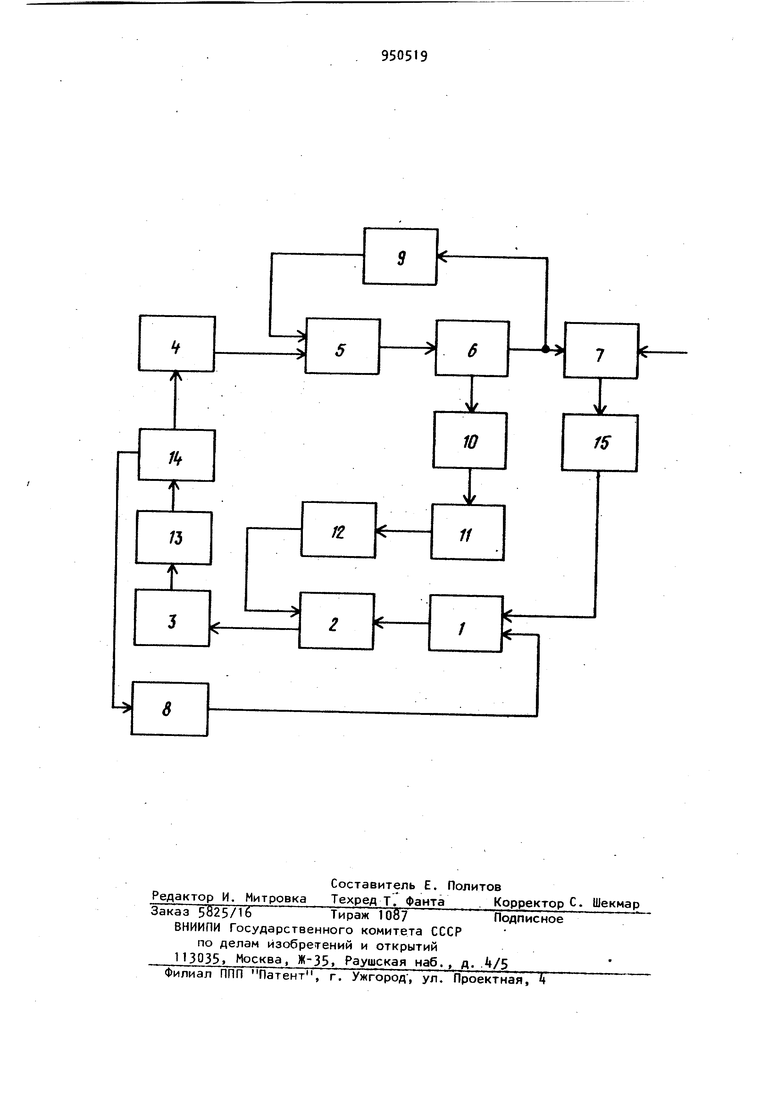
На чертеже представлена функциональная схема устройства.
Устройство содержит первый сумматор 1, блок 2 умножения, усилитель 3, датчик угла исполнительного органа, второй сумматор 5 электропривод 6, упругий элемент 7, датчик 3 8 давления, датчик 9 угла задающего органа, датчик 10 тока, фильтр 11 низкой частоты, преобразователь 12 напряжения, электрогидроусилитель 13, гидродвигатель Il, датчик 15 момента задающего органа.. Устройство работает следующим об разом. Датчик 15 момента вырабатывает сигнал, пропорциональный этому моменту. Сигнал с датчика 15 момента поступает на первый вход первого сумматора 1. На второй вход первого сумматора 1 подается сигнал с датчи ка 8 давления, пропорциональный моменту на валу привода исполнитель ного органа. Разностный сигнал с первого сумматора 1 подается на вхо привода (блоки 3, 13 и 1) исполнительного органа через блок 2 умножения. Вал исполнительного органа при этом вращается со скоростью, пропорциональной разности моментов на валах исполнительного и задающего органов в масштабе, определяемом выходным сигналом преобразователя 12. Электропривод 6 органа осуществляет слежение углового положения вала задающего органа за положением вала исполнительного. Слежение происходит под действием сигнала со второго сумматора 5, сравнивающего сигналы с датчиков 9 и 4 угла за дающего и исполнительного органов. Датчик 10 тока якоря электропривода 6 задающего органа вырабатывае сигнал, пропорциональный абсолютной величине тока якоря электродвигател Этот сигнал поступает на фильтр 11 низкой частоты с постоянной времени соизмеримой с постоянной времени на грева конструкции электродвигателя. Сигнал с фильтра 11 низкой частоты подается на преобразователь 12, выходной сигнал которого описывается следующими уравнениями: - ,-. .. J УФ БллЧ&;) и и(0фо Ii) где и, постоянное напряжение уста (ро ки, соответствующее порогу действия защиты; К - коэффициент пропорциональности;4 oL постоянный коэффициент, зависящий от типа электродвигателя и конструкции привода. При нагрузках на электродвигатель, не приводящих к его перегреву, преобразователь 12 реализует уравнение (2) Блок 2 умножения работает в режиме умножения разностного сигнала с первого сумматора 1 на постоянное напряжение К ) нагрузках на электродвигатель которые могут привести к его перегреву, коэффициент умножения разностного сигнала с первого сумматора 1 уменьшается согласно уравнению (1). Это приводит к уменьшению скорости движения привода исполнительного органа, т.е. к уменьшению интенсивности выполнения рабочей операции, снижению нагрузки на электродвигатель и к предотвращению перегрева электродвигателя. Если по мере выполнения рабочей операции масса объекта манипулирования уменьшается, и вследствие этого уменьшаются нагрузки на электродвигатель, то коэффициент умножения разностного сигнала с первого сумматора 1 увеличивается и затем становится постоянным. Применение изобретения позволяет повысить его надежность за счет исключения перегревания электродвигателя привода задающего органа. Формула изобретения Устройство для управления дистанционным манипулятором по авт. св. № 582960, отличающееся тем, что, с целью повышения надежности устройства, оно содержит последовательно соединенные датчик тока, фильтр низкой частоты, преобразователь напряжения и блок умножения, через который выход первого сумматора подключен к входу усилителя, а вход датчика тока соединен с вторым выходом электропривода. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 582960, кл. В 25 J 11/00, 1976 (прототип).
