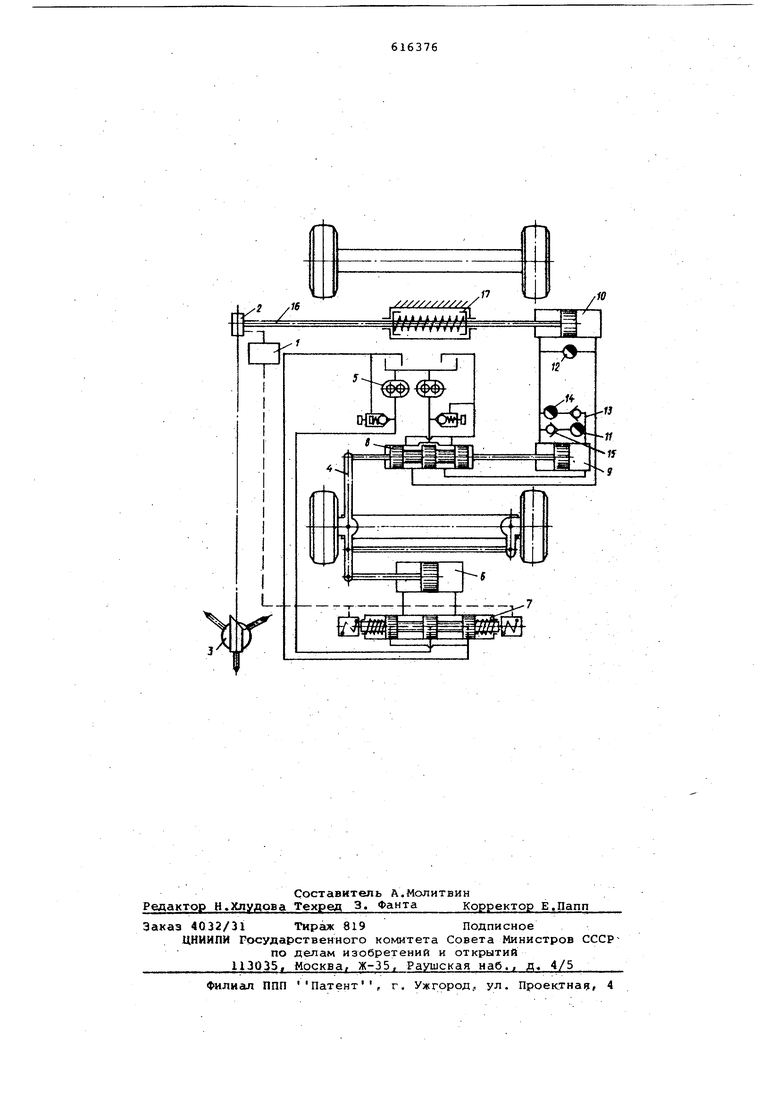
(54) СИСТЕМА АВТОМАТИЧЕСКОГО ВЫДЕРЖИВАНИЯ КУРСА ЗЕМЛЕРОЙНОЙ МАШИНЫ гистрали соединения установлены клапаны 11-15. Шток гидроцилиндра Южестко соединен с датчиком 2 курсапосредством штанги 16, установленнойна корпусе машины с помощью пружины17 двустороннего действия. Работает система автоматического выдерживания курса следующим образом При отклонении машины от курса вместе с ней отходит от копирной линии и датчик 2 курса, он срабатывает включается золотник 7 и производится .поворот колес . гидроцилиндром б. Это тфиводит к повороту рычага 4, перем цаюцего плунжер следящего золотника 8. Перекрытие его окон меняется так, чтобы поршень гидроцилиндра 9 производил отслеживающее перемещение соедииеиного с ним следящего золотника 8 вслед за плунжером до во стаиовления равновесного перекрытия оком золотника, при котором поршень шдрсжилиндра 9 неподвижен. Одиовреме:ино с действием гил:ц)одилиндра 10 происходит сжатие пружины 17, соединенной с датчиком курса, ко тораЛ выходит на оптическую ось. Велео ствие этого командный сигнал снимается, эолотиик 7 становится в нейтральное положение и переметение {яхчага 4 и колес прекращается. Однако колеса остаются в повернутом положенки; вследствие чего процесс выхода машины на курс продолжается. Датчик 2 отходит от копирной линии в противоположную сторону. Возникает командный сигнал знака противоположного первоначальному отклонению и колеса начинают поворачиваться анало гичным образом в обратную сторону до 6 тех пор, пока датчик курса не выйдет на копирную линию и система не выключится вторично. При повороте колес в обратную сторону движение машины к восстановлению курса продолжается. Процесс последовательных включений.протекает до пор, пока машина не выйдет на курс, причем колеса будут занимать правильное положение, не. вызывающее искажение курса. Формула изобретения Система автоматического выдерживания курса землеройной машины, содержащая блок управления с датчиком курса и приемный рычаг поворота колес, источник давления жидкостей, связанный с исполнительным гидроцилиндром через электрозолотник управления, отличающаяся тем, что, с целью првышения точности и устойчивости процесса управления, она снабжена следящим золотником, плунжер торого прикреплен к рычагу поворота колес, а корпус - к штоку одного из двух последовательно соединенных гидроцилиндров блока управления, при toM шток второго гидроцилиндра жестко связан с датчиком посредством штанги, соединенной с корпусом маиоины возвратной пружиной двустороннего действия. Источники информации, принятые во внимание при экспертизе: 1с Патент ФРГ 952243, кл.84 d, 1956. 2, Кринецкий И.И., Драновский А.И. Автоматическое вождение .колесных и гусеничных машин по постоянным трассам. Н., Машиностроение, 1971, с.148.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления рабочим органом землеройной машины | 1985 |
|
SU1308721A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Бульдозер-планировщик | 1990 |
|
SU1758176A1 |
| АГРЕГАТ ДЛЯ БУРОШНЕКОВОЙ ВЫЕМКИ УГЛЯ | 1990 |
|
RU2011815C1 |
| Система управления бесступенчатым механизмом поворота транспортного средства | 1991 |
|
SU1789405A1 |
| Система управления бесступенчатым механизмом поворота транспортного средства | 1987 |
|
SU1474014A1 |
| Машина для посадки саженцев на склонах | 1990 |
|
SU1738121A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |