1
Р1зобретение относится к области станкостроения и предназначено для обработки деталей на стайках роторного типа.
Известны роторные станки, содержащие рабочий ротор, инструментальный блок, по оси шпинделей которого концентрично один в другом расположены кинематически связанные между собой подвижная втулка и толкатель 1.
Однако известные роторные станки имеют недостаток, заключающийся в том, что для питания рабочего ротора необходим транспортный ротор, что ведет к увеличению кинематических цепей н металлоемкости автомата, а следовательно к усложнению конструкции и к увеличению габаритов станка.
Изобретение устраняет указанный недостаток тем, что в подвижных втулках выполнены гнезда под обрабатываемую заготовку, тем самым отпадает необходимость в использовании транспортного ротора для обслуживания роторного станка.
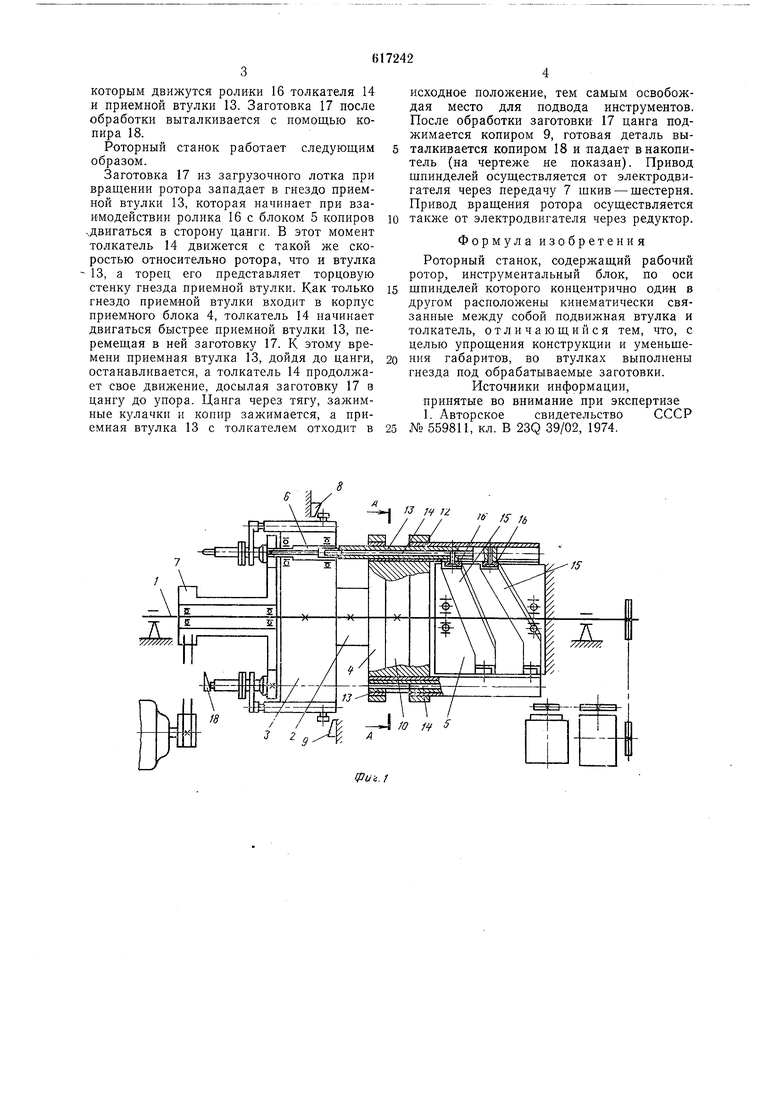
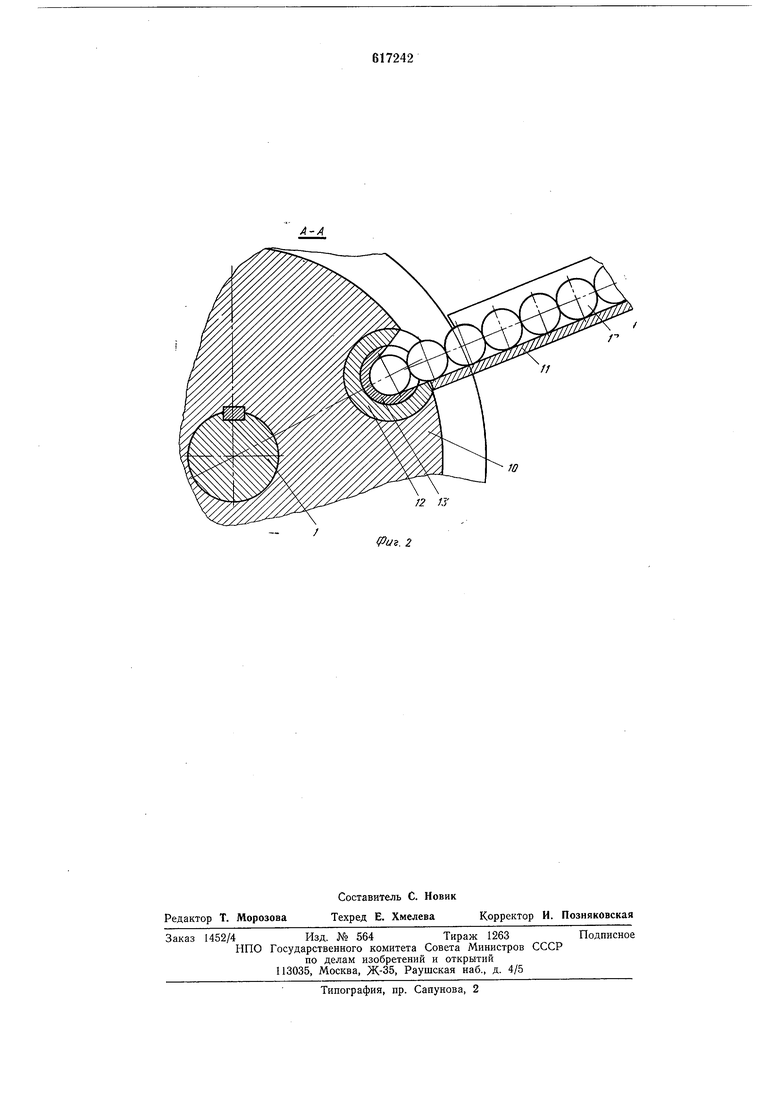
На фиг. 1 показана кинематическая схема роторного станка; «а фиг. 2 - сечение А-А на фиг. 1.
На станине роторного станка смонтирован ротор, посаженный на вал 1. Ротор состоит из инструментального блока 2, рабочего блока 3, приемного блока 4 н блока 5 копиров.
Рабочий блок имеет расположенные по окружности шпиндели 6 с посаженными на
5 них шестернями, вращающимися с постоянной скоростью через передачу 7 шкив - шестерня. Внутри каждого шпинделя помещается цанговый зажим, состоящий из цанги, соединенной с тягой, в пазы которой
Q вставлены зажимные кулачки (не показанные на чертеже), получающие движение на зажим цанги через копир 8, а разжим - через копир 9. Инструментальный блок представляет собой многогранную призму,
5 посаженную на центральный вал 1, число граней которой соответствует числу шпинделей. Нриемный блок 4 состоит из барабана 10 с кольцевой проточкой по ширине загрузочного лотка 11, в котором соосно со шпинделями смонтированы неподвижные пиноли 12. В пинолях могут свободно вдоль оси перемещаться приемные втулки 13, выполненные в виде полных цилиндров с гнездами под заготовки, внутри которых
г перемещаются подвижные толкатели 14. Блок 5 копиров представляет собой барабан, неподвижно прикрепленный к станине, с расположенными на поверхности направляющими пазами 15 - копирами, по
которым движутся ролики 16 толкателя 14 и приемной втулки 13. Заготовка 17 после обработки выталкивается с помощью копира 18.
Роториый станок работает следующим образом.
Заготовка 17 из загрузочного лотка при вращении ротора западает в гнездо приемной втулки 13, которая начинает при взаимодействии ролика 16 с блоком 5 копиров ..двигаться в сторону цанги. В этот момент толкатель 14 движется с такой же скоростью относительно ротора, что и втулка 13, а торец его представляет торцовую стенку гнезда приемной втулки. Как только гнездо приемной втулки входит в корпус приемного блока 4, толкатель 14 начинает двигаться быстрее приемной втулки 13, перемещая в ней заготовку 17. К этому времени приемная втулка 13, дойдя до цанги, останавливается, а толкатель 14 продолжает свое движение, досылая заготовку 17 в цангу до упора. Цанга через тягу, зажимные кулачки и копир зажимается, а приемная втулка 13 с толкателем отходит в
исходное положение, тем самым освобождая место для подвода инструментов. После обработки заготовки 17 цанга поджимается копиром 9, готовая деталь выталкивается копиром 18 и падает в накопитель (на чертеже не показан). Привод шпинделей осуществляется от электродвигателя через передачу 7 шкив - шестерня. Привод вращения ротора осуществляется также от электродвигателя через редуктор.
Формула изобретения
Роторный станок, содержащий рабочий ротор, инструментальный блок, по оси шпинделей которого концентрично оди« в другом расположены кинематически связанные между собой подвижная втулка и толкатель, отличающийся тем, что, с целью упрощения конструкции и уменьшения габаритов, во втулках выполнены гнезда под обрабатываемые заготовки.
Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР № 559811, кл. В 23Q 39/02, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат для нарезания резьбы в гайках | 1982 |
|
SU1076224A1 |
| Роторный автомат для нарезания резьбы в гайках | 1990 |
|
SU1822814A1 |
| Автоматический токарный станок | 1982 |
|
SU1026972A1 |
| Многопозиционный рабочий ротор | 1976 |
|
SU679374A1 |
| Приспособление к станку для двухстороннего сверления (или зенкования) отверстий | 1956 |
|
SU115938A1 |
| АВТОМАТИЧЕСКАЯ РОТОРНАЯ МАШИНА | 1965 |
|
SU216096A1 |
| ВСЕСОЮЗНА Pi г «rrJifUO ТГ"-??!!.?!'"'";'JC | 1973 |
|
SU369981A1 |
| Ротор для механической обработки заготовок | 1973 |
|
SU442043A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Роторный полуавтомат | 1990 |
|
SU1776220A3 |
Ю
J2 /J
(Риъ. 2
