1
Изобретение относится к области грузоподъемных устройств, а именно к магнитным захватам, и может быть использовано в различных устройствах для подъема и переноса стальных и железных грузов.
Известен автоматический магнитный захват, содержащий корпус с размещенными в нем блоками постоянных магнитов и систему рычагов, шарнирно соединенную с корпусом и навешиваемую на крюк грузоподъемного механизма 1.
Известен также автоматический магнитный захват, содержащий корпус с размещенными в нем подвижным и нeпoдвилvIIым блоками постоянных магнитов и механизм управления подвижным блоком постоянных магнитов, включающий в себя стержень, -жестко укрепленный на подвижных блоках и навещиваемый на крюк грузоподъемного средства 2.
Недостатком этих захватов является сложность проведения операции но освобождению груза от захвата из-за наличия остаточного магнитного потока в зоне контакта груза и магнитного захвата.
Цель изобретения - облегчение освобождения захвата от груза.
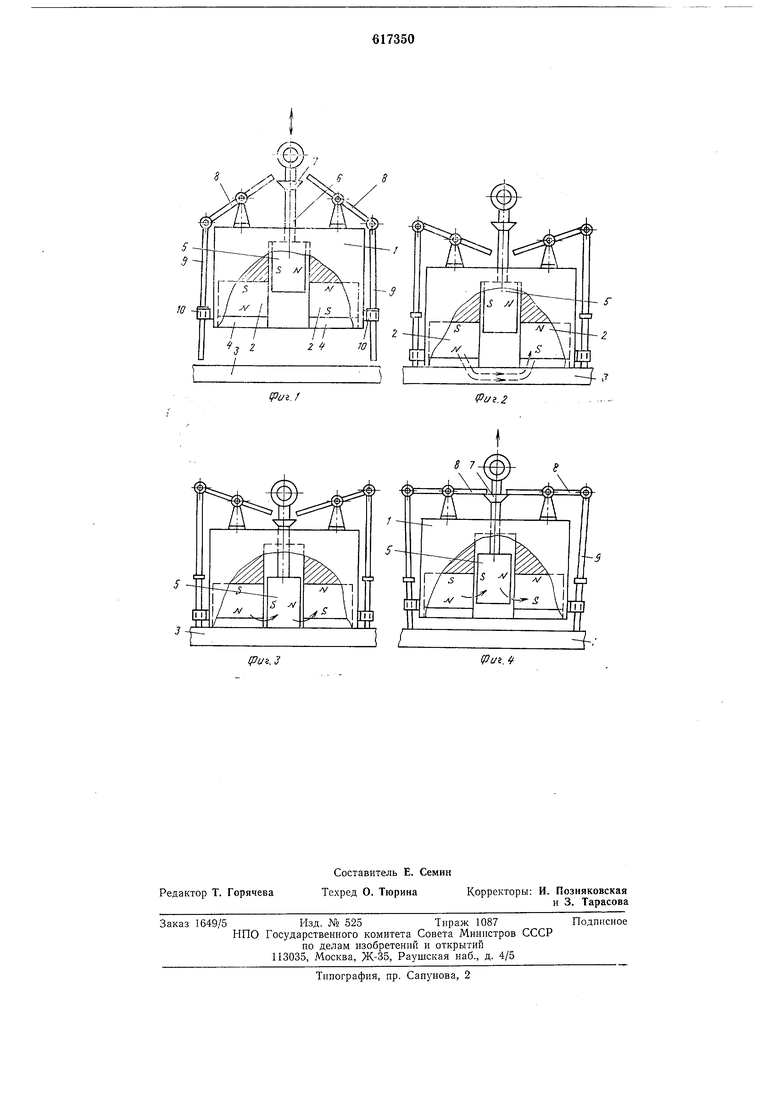
Это достигается тем, что механизм управления подвижными блоками снабжен упором, установленным на стержне, двумя рычагами, щарнирно закрепленными на корпусе и взаимодействующими с упомянутым уиором при его перемещении и подвижными вертикальными щтоками, каждый из которых щариирно соединен с соответствующим рычагом и з становлен в направляющих, закрепленных на боковых стенках корпуса. На фиг. 1 изображен предлагаемый захват в исходном состоянии, общий вид; на фиг. 2 - то же, в момент притягивания и переноса груза; на фиг. 3 - то же, в момент освобождения груза; на . 4 - то же, в начале подъема захвата в исходное
состояние.
Автоматический магнитный захват состоит из немагнитного корпуса 1, в котором закреплены два неподвижных блока 2 постоянных магнитов, обращенных разноименными полюсами в направлении ферромагнитного груза 3 и снабженных полюсными наконечниками 4. Кроме того, в корпусе 1 между неподвижными блоками 2 магнитов размещен подвижный блок 5 постоянных
магнитов, который посредством стержня 6 с упором 7 соединен с крюком грузоподъем юго механизма. По обе стороны стержня 6 на корпусе 1 установлены два рычага 8. Рычаги 8 одним концом щариирно соединены
со щтоками 9, проходящими через направляющие 10, а другим - могут взаимодействовать с упором 7.
Работает захват следующим образом.
С помощью грузоподъемного механизма захват переносится и опускается на груз 3 (см. фиг. 2), который под действием магнитного поля притягивается к неподвижным блокам 2 магнитов. При этом подвижный блок 5 магнитов удерживается крюком грузоподъемного механизма в верхнем положении.
В таком состоянии груз переносится и опускается на место разгрузки (см. фиг. 3). Подвижный блок 5 магнитов после этого под действием собственного веса н силы втягивания перемещается в нижнее положение. При этом действие магнитного поля резко уменьшается и груз освобождается.
При последующем перемещении подвижного блока 5 магнитов крюком грузоподъемного механизма в исходное состояние (см. фиг. 4) концы рычагов 8, взаимодействуя с упором 7, разворачиваются и приподнимают корпус 1 над грузом 3. Внедрение предлагаемого захвата позволит облегчить операцию автоматического освобождения груза от захвата после его доставки к месту складирования.
Формула изобретения
Автоматический магнитный захват, содержащий корпус с размещенными в нем подвижным и неподвижным блоками постоянных магнитов и механизм управления подвижным блоком постоянных магнитов, включающий в себя стержень, жестко укрепленный на подвижных блоках и навешиваемый на крюк грузоподъемного средства, отличающийся тем, что, с целью облегчения освобождения захвата от груза, механизм управления подвижным блоком снабжен упором, установленным на стержне, двумя рычагами, шарнирно закрепленными на корпусе и взаимодействующими с упомянутым упором при его перемещении и подвижными вертикальными штоками, каждый из которых шариирно соединен с соответствующим рычагом и установлен в направляющих, закрепленных на боковых стенках корпуса.
Источники информации, принятые во внимание при экспертизе
1.Патент ГДР № 105428, кл. 35Ь 6/23, 1973.
2.Авторское свидетельство СССР Яо 413100, кл. В 66С 1/04, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для деталей с отверстиями | 1979 |
|
SU870112A1 |
| Автоматический магнитный захват Быченко | 1980 |
|
SU933602A1 |
| Автоматический магнитный захват | 1987 |
|
SU1504196A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Автоматический магнитный захват | 1979 |
|
SU770989A1 |
| Автоматический магнитный захват | 1989 |
|
SU1705220A1 |
| Автоматический магнитный захват | 1989 |
|
SU1791322A1 |
| Грузозахватная траверса | 1986 |
|
SU1409567A1 |
| Автоматический магнитный захват | 1989 |
|
SU1675184A1 |
| Захватное устройство для грузов в мешках | 1983 |
|
SU1129167A1 |