Изобретение относится к механосбороным работам, в частности к оборудованию для сборки запрессовкой, например, оси в корпус с проушинами.
Известен полуавтомат для запрессовки оси в проушины корпуса, содержащий механизм запрессовки в виде приводного штока, установленного на кронштейне связанного со штангой, и механизм центрирования с приемным устройством Г11.
Однако известный полуавтомат не обеспечивает запрессовки оси в корпус с удаленными друг от друга проушинами.
Цел1-.ю изобретения является обеспече ние запрессовки оси в корпусе с разнесенными проушинами.
Поставлештая цель достигается за счет того, что автомат снабжен двумя кулачковыми командоаппаратами аля обес печения В1гбрации в горизонтальной и вертикал1:,ной плоскостях центрируемой оси, один из которых кинематически связан с механизмом запр ссовкн, а другой - с механизмом центрирования, при
этом механизм запрессовки снабжйн смонтированными на кронштейне электромагнитом и соединенным с ним двуплечим рычагом, воздействующим на свободный торец штока.
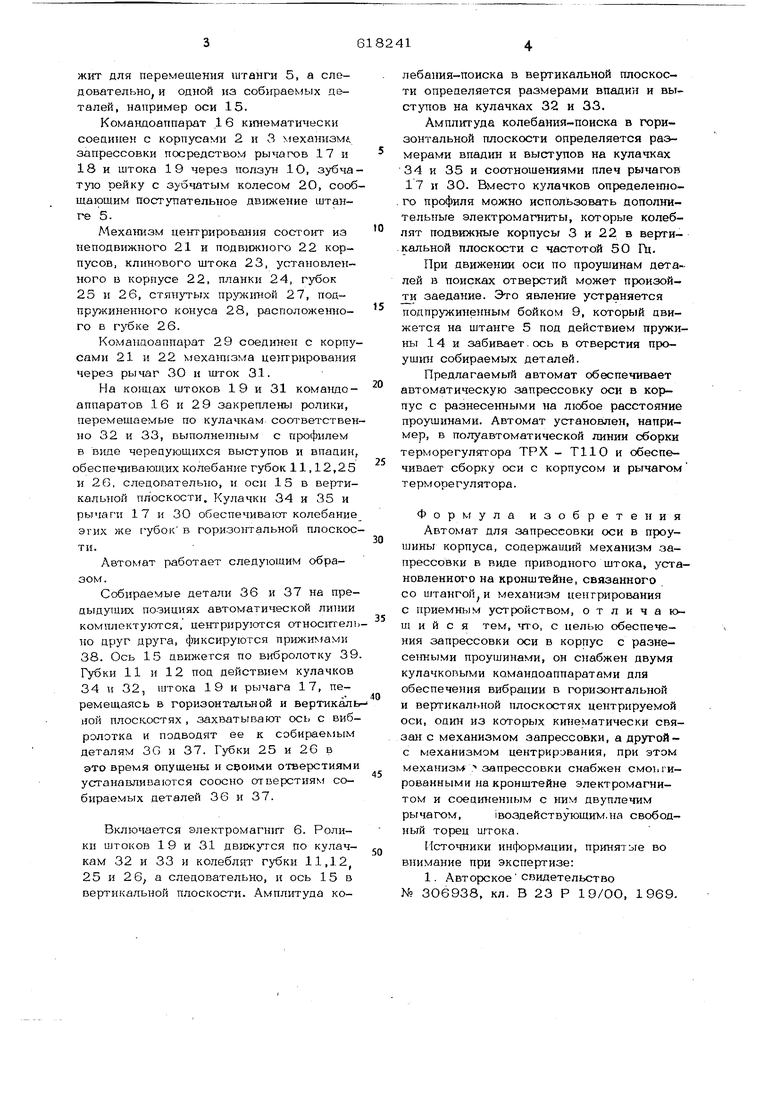
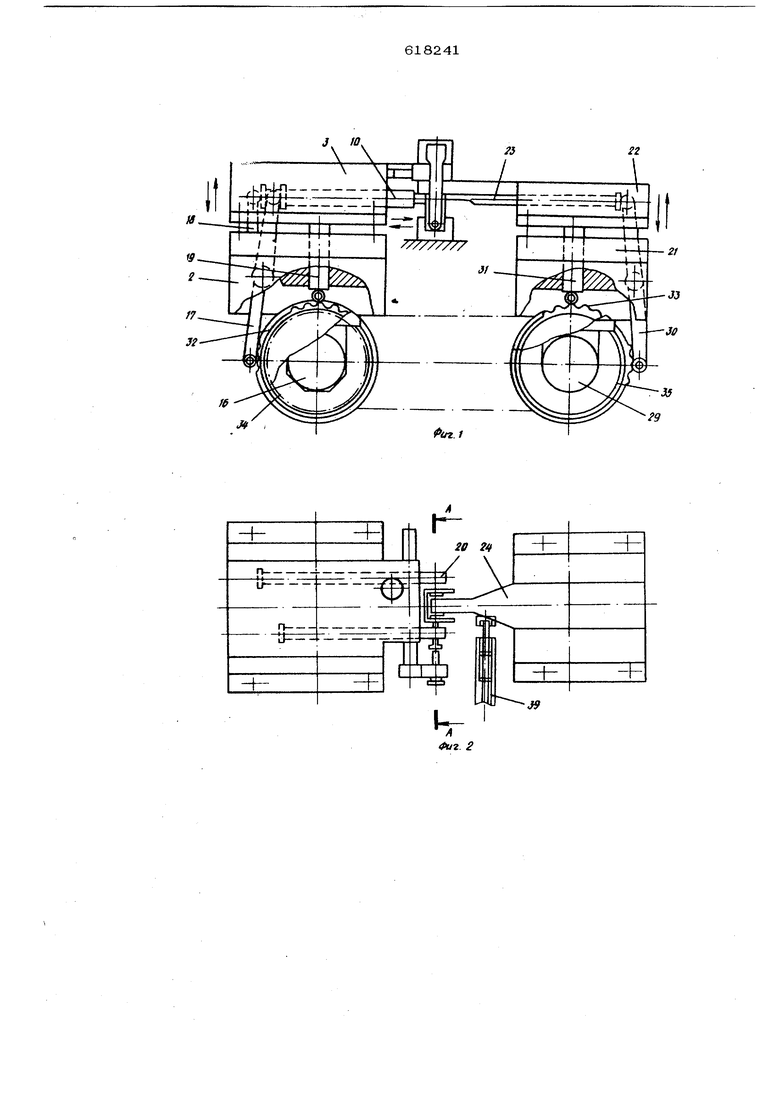
На фиг. 1 изображен автомат, общий вид; на фиг. 2 - то же, вид сверху на фиг. 3 - разрез А-А фиг. 2.
Автомат содержит механизм запрессовки оси и механизм центрирования оси, установленные на станице 1, а кулачковые командоаппараты связаны кинематически соответственно с механизмами.
Механизм запрессовки имеет неподвижный 2 и подвижный 3 корпусы, на последнем из которых закреплены кронштейны 4, зубчатая штанга 5, электромагнит 6 и корпус 7, а также шарнирно закреплен двуплечий рычаг 8 и установлен подпружиненный боек 9, контактирующий с двуплечим рычагом. В корпусе 3 расположен ползун 10, на котором кропятся губки 11 и 12, стягиппем},1е пружиной 13.о Пружина 14 слуЖ1ГГ для перемещения штанги 5, а следовательно, и одной на собираемых деталей, например оси 15. Командоаппарат 1 6 кинематически соединен с корпусами 2 и 3 механизму запрессовки посредством рычагов 17 и 18 и штока 19 через ползун 1О, зубча тую рейку с зубчатым колесом 20, сооб щающим поступательное движение штанге 5. Механизм центрирования состоит из неподвижного 21 и подв10кного 22 корпусов, клинового штока 23, установленного в корпусе 22, планки 24, губок 25 и 26, 27, подпружиненного конуса 28, расположетюго в губке 26. Команаоаппарат 29 соединен с корпу сами 21 и 22 мехагагзма центрирования через рычаг 30 и шток 31. На штоков 19 и 31 командоаппаратов 16 и 29 закреплены ролики, переХГешаемые по кулачкам соответствен но 32 и 33, выполненным с профилем в виде чередующихся выступов и впадин обеспечивающих колебание губок 11,12,25 и 26, следовательно, и оси 15 в вертикальной плоскости. Кулачки 34 и 35 и рычаги 17 и 30 обеспечивают колебание этих же -убок в горизонтально плоскос ти. Автомат работает следующим образом. Собираемые детали 36 и 37 на предыдущих позициях автоматической линии комплектуются, цезггрируются относ1ггель но друг друга, фиксируются пpижи aми 38. Ось 15 движется по В1 бролотку 39 Губки И и 12 под действием кулачков 34 1 32, штока 19 и рычага 17, перемещаясь в горизонтальной и вертикаль ной плоскостях , захватывают ось с вибролотка и подводят ее к собираемым деталям 30 и 37. Губки 25 и 26 в это время опущены и своими отверстиями устанавливаются соосно отверстиям собираемых деталей 36 и 37. Включается электромагнит 6. Ролики штоков 19 и 31 движутся по кулачкам 32 и 33 и колебл5П губки 11,12, 25 и 26, а следовательно, и ось 15 в вертикальной плоскости. Амплитуда колебания-поиска в вертикальной плоскости определяется размерами впадин и выступов на кулачках 32 и 33. Амплитуда колебания-поиска в горизонтальной плоскости определяется размерами впадин и выступов на кулачках 34 и 35 и соотношениями плеч рычагов 17 и 30. Вместо кулачков определенного профиля можно использовать дополнительные электромагниты, которые колеблят подвижные корпусы 3 и 22 в вертикальной плоскости с частотой 50 fh. При движении оси по проушинам деталей в поисках отверстий может произой- Tii заедание. Это явление устраняется подпружиненным бойком 9, который движется на штанге 5 под действием пружины 14 и забивает.ось в отверстия проушш собираемых деталей. Предлагаемый автомат обеспечивает автоматическую запрессовку оси в корпус с разнесенными на любое расстояние проушинами. Автомат установлен, например, в полуавтоматической линии сборки терморегулятора ТРХ - Т110 и обеспечивает сборку оси с корпусом и рычагом терморегулятора. Формула изобретения Автомат для запрессовки оси в проушины корпуса, содержащий механизм запрессовки в виде приводного щтока, установленного на кронштейне, связанного со штангой и механизм центрирования с приемным устройством, о т л и ч а ющ и и с я тем, что, с целью обеспечения запрессовки оси в корпус с резнесе1шыми проушинами, он снабжен двумя кулачковыми командоаппаратами для обеспечения вибрации в горизонтальной и вертикальной плоскостях центрируемой оси, один из которых кшюматически связан с механизмом запрессовки, а другойс механизмом центрирования, при этом механизм запрессовки снабжен смоьги- рованными на кронщтейне электромагнитом и соединенным с ним двуплечим рычагом,1воздействующим.на свободный торец штока. Источники инс|юрмации, принятые во внимание при экспертизе: 1. Авторскоесвидетельство N9 306938, кл. В 23 Р 19/00, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТ ДЛЯ СБОРКИ ЗВЕНЬЕВ ГУСЕНИЦ | 1971 |
|
SU306938A1 |
| Автомат для сборки комбинированной петли | 1977 |
|
SU743837A1 |
| Полуавтомат для сборки узлов запрессовкой | 1981 |
|
SU986700A1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU1009692A1 |
| Автомат для сборки запрессовкой ушковых пуговиц | 1982 |
|
SU1142251A1 |
| Линия для изготовления и сборки грифов музыкальных инструментов | 1983 |
|
SU1169013A1 |
| Устройство для запрессовки и обрезки ладков в грифе музыкального инструмента | 1985 |
|
SU1307471A1 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| Многопозиционный автомат для сборки узлов | 1978 |
|
SU747685A1 |
| Аппарат для контролирования правильности подачи листов и отделения незапечатанных и бракованных листов на листовых печатных машинах | 1961 |
|
SU145595A1 |
l-/f
Л Л А Л А А Л Л А Л Л Л Л Л ЛАЖА
VVVVVVVVVVVV УУУ ЛГУУ
W////////////// /7//7//
щ -- У///////////////У7 ///7/////У///////////. К
