(54) РАДИУСОУГЛОМЕР ДЛЯ СВОБОДНОЙ ГИБКИ ТРУБ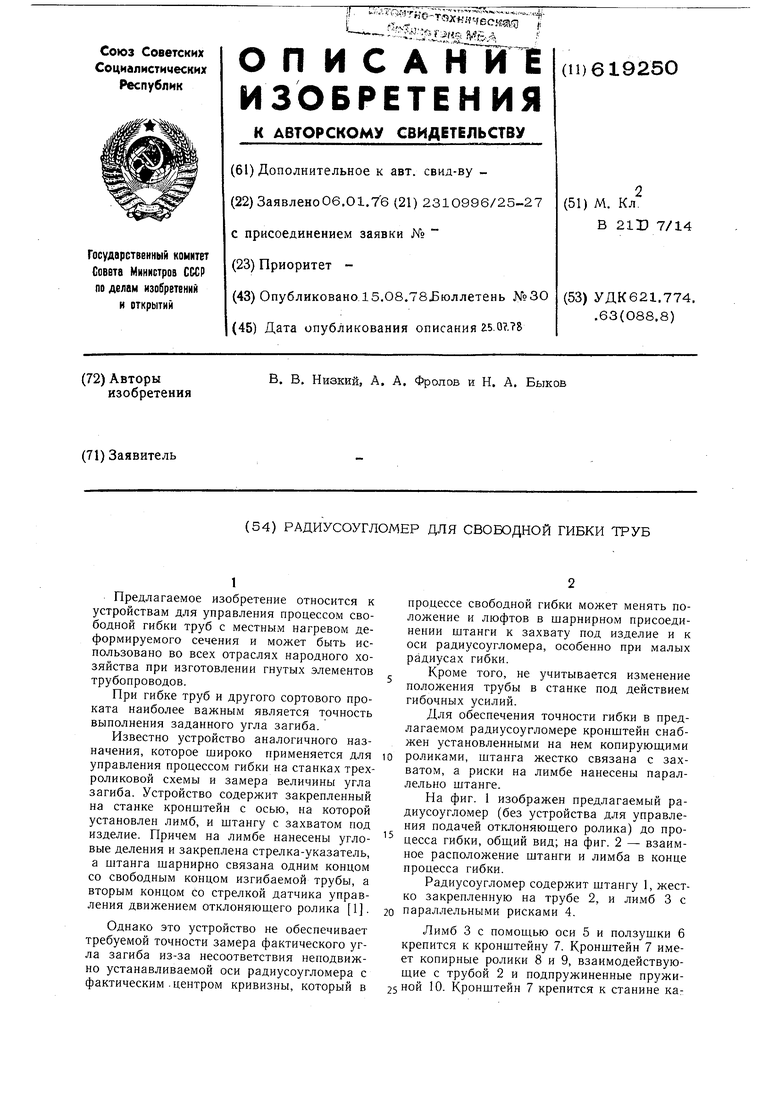
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля заданных углов гибки | 1976 |
|
SU707646A1 |
| Станок для гибки труб | 1980 |
|
SU963605A2 |
| Способ изготовления трубопроводов с криволинейными участками | 1981 |
|
SU1013020A1 |
| Устройство для демонтажа механизмов | 1988 |
|
SU1570184A1 |
| Приспособление для обработки косых срезов труб | 1974 |
|
SU498097A1 |
| Устройство для перемещения изделий | 1988 |
|
SU1563856A1 |
| Устройство для управления процессом изгибания трубы на трубогибочном станке | 1957 |
|
SU115441A2 |
| Устройство для центрирования изделия по оси | 1977 |
|
SU663491A1 |
| Устройство для крепления переносных станков | 1976 |
|
SU626939A1 |
| Приспособление для определения линий реза на поверхности деталей типа труб | 1980 |
|
SU1006112A1 |
1
Предлагаемое изобретение относится к устройствам для управления процессом свободной гибки труб с местным нагревом деформируемого сечения и может быть использовано во всех отраслях народного хозяйства при изготовлении гнутых элементов трубопроводов.
При гибке труб и другого сортового проката наиболее важным является точность выполнения заданного угла загиба.
Известно устройство аналогичного назначения, которое широко применяется для управления процессом гибки на станках трехроликовой схемы и замера величины угла загиба. Устройство содержит закрепленный на станке кронштейн с осью, на которой установлен лимб, и штангу с захватом под изделие. Причем на лимбе нанесены угловые деления и закреплена стрелка-указатель, а штанга шарнирно связана одним концом со свободным кондом изгибаемой трубы, а вторым концом со стрелкой датчика управления движением отклоняюшего ролика 1.
Однако это устройство не обеспечивает требуемой точности замера фактического угла загиба из-за несоответствия неподвижно устанавливаемой оси радиусоугломера с фактическим .центром кривизны, который в
процессе свободной гибки может менять положение и люфтов в шарнирном присоединении штанги к захвату под изделие и к оси радиусоугломера, особенно при малых радиусах гибки.
Кроме того, не учитывается изменение положения трубы в станке под действием гибочных усилий.
Для обеспечения точности гибки в предлагаемом радиусоугломере кронштейн снабжен установленными на нем копирующими
роликами, штанга жестко связана с захватом, а риски на лимбе нанесены параллельно штанге.
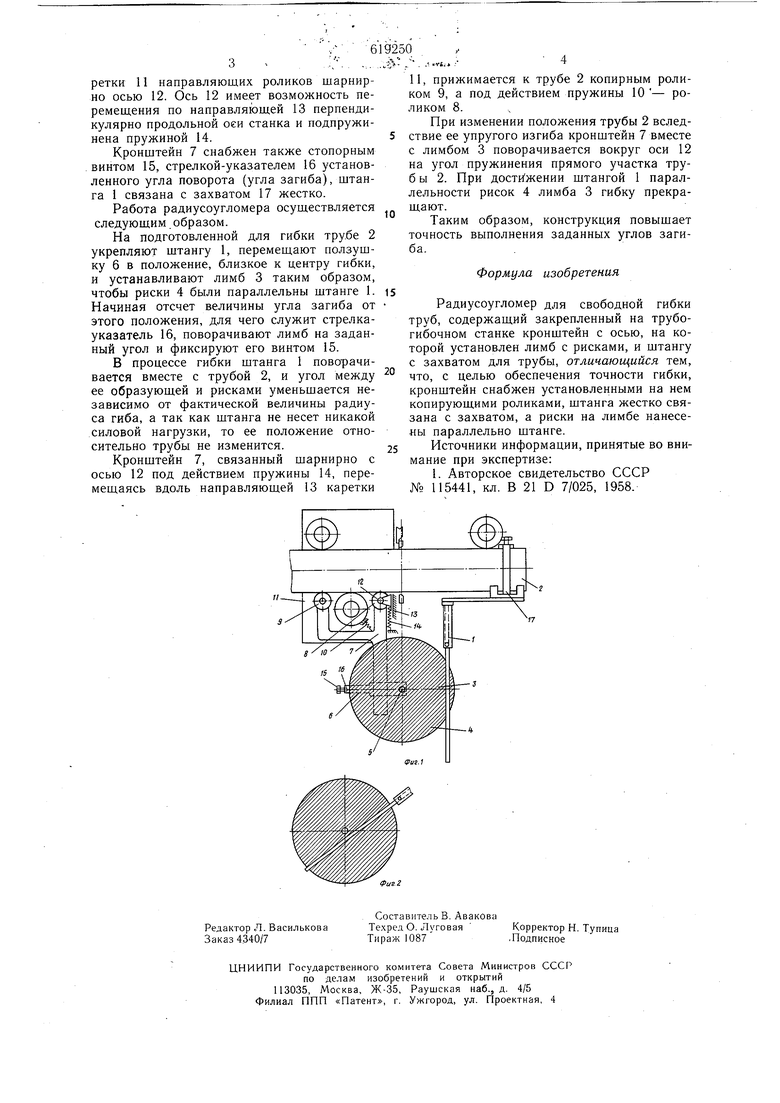
На фиг. 1 изображен предлагаемый радиусоугломер (без устройства для управления подачей отклоняющего ролика) до процесса гибки, общий вид; на фиг. 2 - взаимное расположение штанги и лимба в конце процесса гибки.
Радиусоугломер содержит штангу 1, жестко закрепленную на трубе 2, и лимб 3 с
0 параллельными рисками 4.
Лимб 3 с помощью оси 5 и ползушки б крепится к кронштейну 7. Кронштейн 7 имеет копирные ролики 8 и 9, взаимодействующие с трубой 2 и подпружиненные пружиной 10. Кронштейн 7 крепится к станине каг
