(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАДАННЫХ УГЛОВ : ГИБКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла пружинения к трубогибочному станку | 1976 |
|
SU662197A1 |
| Радиусоугломер для свободной гибки труб | 1976 |
|
SU619250A1 |
| Гибочная головка к трубогибочному станку с программным управлением | 1976 |
|
SU633638A1 |
| Головка гибочная трубогибочного станка | 1978 |
|
SU772648A1 |
| Трубогибочный станок с индукционным нагревом | 1976 |
|
SU676354A2 |
| Устройство для коррекции угловпРужиНЕНия HA ТРубОгибОчНыХМАшиНАХ | 1979 |
|
SU804081A1 |
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| ТРУБОГИБОЧНЫЙ СТАНОК | 1987 |
|
SU1429414A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
Изобретение относится к области машиностроен.ия и может быть исполь зовано в устройствах для гибки труб при Изготовлении гнутых элементов трубопроводов.
Из известных устройств для контроля заданных углов гибки наиболее близким к изобретению является устройство, содержащее кронштейн с лимбом и датчиком, смонтированные на станине трубогибочного станка, и. штангу с захватом, связанную с трубой 1 ..
Но в.известном устройстве отсутствует возможность учета величины пружинения при гибке труб на станках с местным индукционным нагревом что существенно снижает точность гибки.
Цель изобретения - повышение точности гибки труб на заданный угол.
Для достижения цели лимб снабжен направляющими, а датчик установлен в направляющих и выполнен в виде подпружиненной ползушки и установленной на ней шестеренчатой передачи, ведомая шестерня которой снабжена тормозом и соединена с планкой, несущей по концам электрсконтакты.
контактирующие со штангой, а ведущая шестерня - поворотным рычагом, со смонтированной на его свободном конце Зс1щелкой, при этом передаточное отношение шестеренчатой передачей связано с длиной поворотного рычага и с расстоянием от оси ведомой шестерни до электроконтактов соотношением
1civib
где а и b - расстояние от оси ведомой шестерни до электро5контактов, смонтированHbix на планке; с - длина поворотного рыча- .
га.
Изобретение показано на, чертеже.
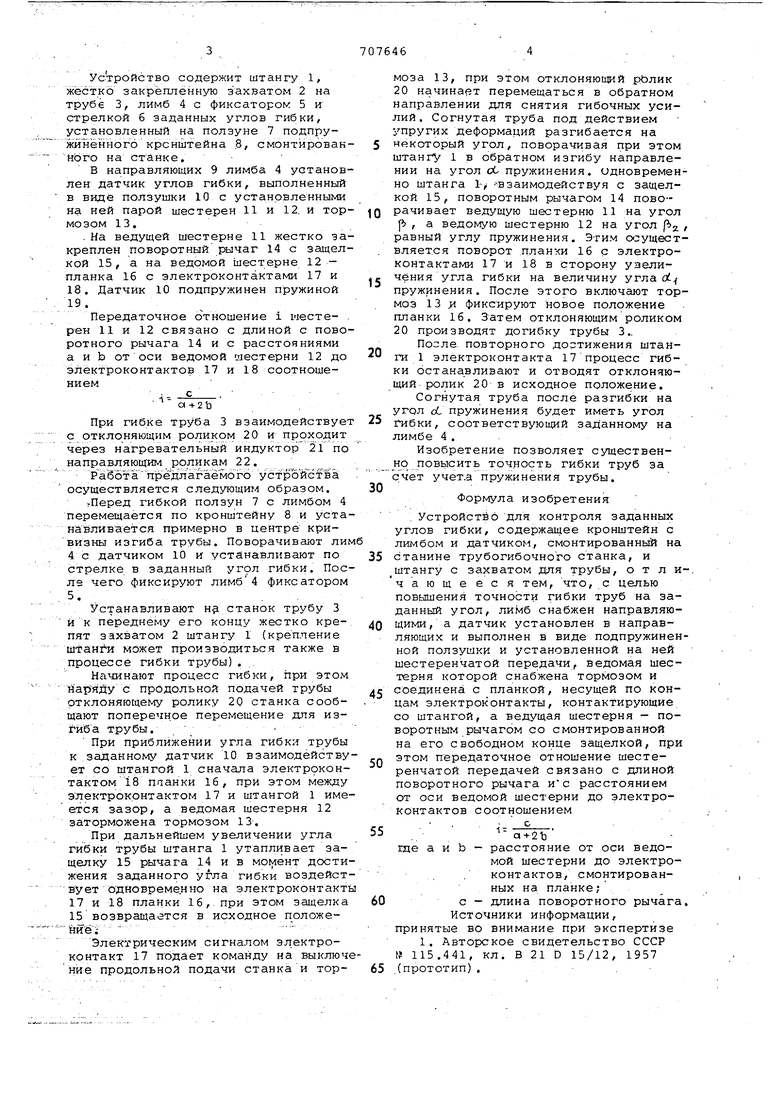
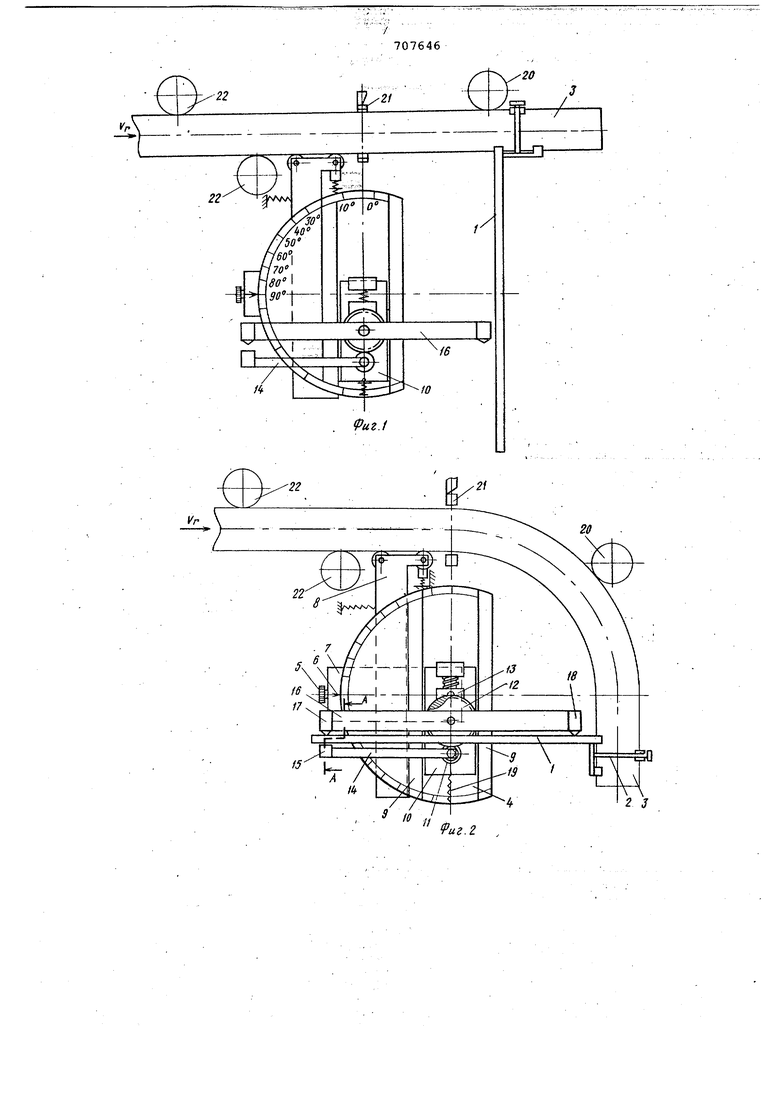
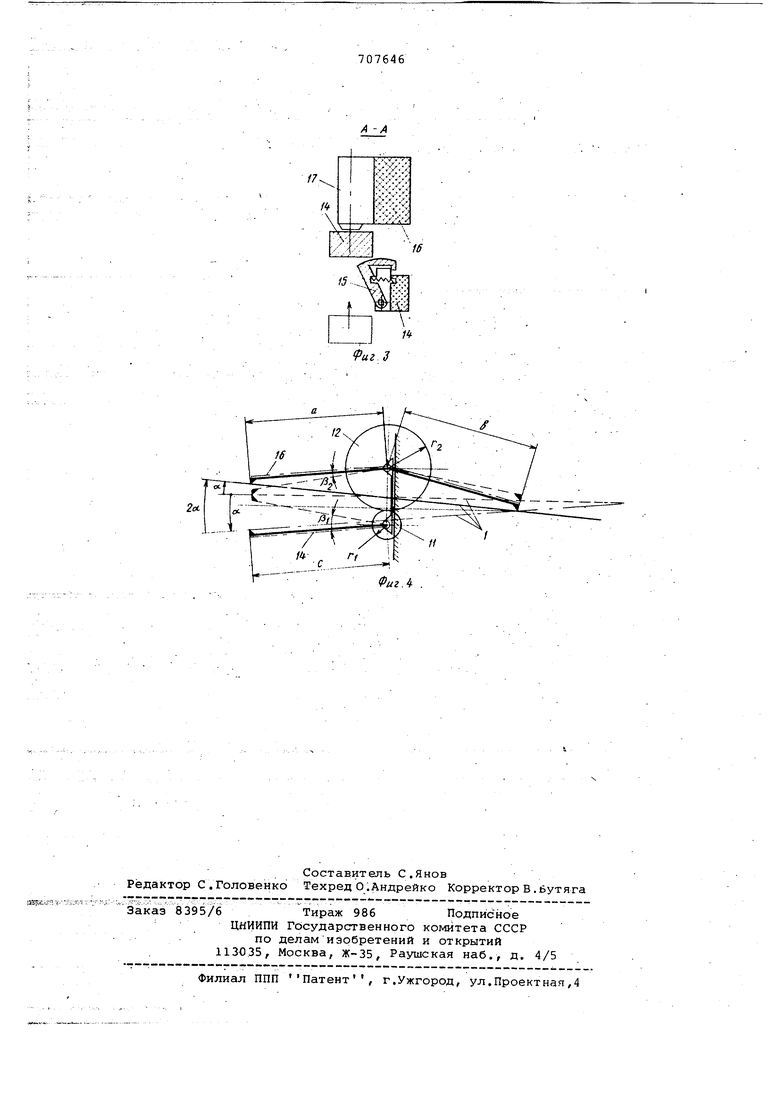
0 На фиг. 1 и 2 изображен общий вид устройства в начальный и конечный момент гибки трубы соответственно; на фиг. 3 - сечение А-А фиг. 2; на фиг. 4 - схема расположения штанги, план5ки и поворотного рычага устройства по достижении заданного угла гибки (пунктирная линия) и после отвода отклоняющего роЛика с учетом пружинения трубы (штрих-пунктирная линия) Устройство содержит штангу 1, жёстко закреплённую захватом 2 на трубе 3, лимб 4 с фиксатором 5 и стрелкой 6 заданных углов гибки, установленный на ползуне 7 подпружи1нённог6 кронштейна ,8/ смонтирован ного на станке, В направляющих 9 лимба 4 установлен датчик углов гибки, выполненный в виде ползушки 10 с ycтaнpвлeнныгvIи на ней парой шестерен 11 и 12. и тормозом 13. .На ведущей шестерне 11 жестко закреплен поворотный рычаг 14 с защелкой 15, а на ведомой шестерне 12 - планка 16 с электроконтактами 17 и 18, Датчик 10 подпружинен пружиной 19. Передаточное отношение i шесте- . рен 11 и 12 связано с длиной с пово ротного рычага 14 и с расстояниями а и b отоси ведомой шестерни 12 до электроконтактов 17 и 18 соотношениемi - с . a-v2b При гибке труба 3 взаимодействует с отклоняющим роликом 20 и проходит через нагревательный индуктор 21 по направляющим роликам 22. Работапрёдлагаёмого устройства осуществляется следующим образом. Перед гибкой ползун 7 с лимбом 4 перемещается по кронштейну 8 и уста навливается примерно в центре кривизны изгиба трубы. Поворачивают лим 4 с датчиком 10 И устанавливают по стрелке в заданный угол гибки. Пос ле чего фиксируют лимб4 фиксатором 5, Устанавливают нэ станок трубу 3 и к переднему его концу жестко крепят захватом 2 штангу 1 (крепление штанги мбжет производиться также в процессе гибки трубы). . Начинают процесс гибки, при этом йаряду с продольной подачей трубы отклоняющему ролику 20 станка сообщают поперечное перемещение для изгйба трубы. При приближении угла гибки трубы к .заданному датчик 10 взаимодейству ет со штангой 1 сначала электроконтактом 18 планки 16, при этом между электроконтактом 17 и штангой 1 име ется зазор, а ведомая шестерня 12 заторможена тормозом 13. При дальнейшем увеличении угла ги13ки трубы штанга 1 утапливает защелку 15 рычага 14 и в MONieHT дости жения заданного угла гибки воздейст вует одновременно на электроконтакты 17 и 18 планки 16,.при этом защелка 15 возвращается в исходное положе HifeiЭлектрическим сигналом злектроконтакт 17 подает комаНду на вы.ключ ние продольной подачи станка и тормоза 13, при этом отклоняющий рЬлик 20 начинает перемещаться в обратном направлении для снятия гибочных усилий. Согнутая труба под действием упругих деформаций разгибается на некоторый угол, поворачивая при этом штангу 1 в обратном изгибу направлении на угол сС пружинения. одновременно штанга Ь - взаимодействуя с защелкой 15, поворотным рычагом 14 поворачивает ведущую шестерню 11 на угол fb , а ведомую шестерню 12 на угол /ij. t равный углу пружинения. Этим О::уществляет.ся поворот .планки 16 с электроконтактами 17 и 18 в сторону увеличения угла гибки на величину угла cL пружинения. После этого включают тормоз 13 1 фиксируют Новое положение планки 16. Затем отклоняющим роликом 20 производят догибку трубы 3.. Пос:ле. повторного достижения штанги 1 электроконтакта 17процесс гибки останавливают и отводят отклоняющий- ролик 20 в исходное положение. Согнутая труба после разгибки на угол cL пружинения будет иметь угол Гибки, соответствующий заданному на лимбе 4.. Изобретение позволяет существендо повысить точность гибки труб за счет учет.а пружинения трубы. Формула изобретения Устройство для контроля заданных углов гибки, содержащее кронштейн с лимбом и датчиком, смонтированный на станине трубогибочного станка, и штангу с захватом для трубы, о т л и-, чающееся тем, что, с целью повышения точности гибки труб на заданный угол, лиМб снабжен направляющими, а датчик установлен в направляющих и выполнен в виде подпружиненной ползушк и установленной на ней шестеренчатой передачи, ведомая шестерня которой снабжена торМозом и соединена с планкой, несущей по концам электроконтакты, контактирующие со штангой, а ведущая шестерня - поворотным рычагом со смонтированной на его свободном конце защелкой, при этом передаточное отношение шестеренчатой передачей связано с длиной поворотного рыч.ага ис расстоянием от оси ведомой шестерни до электроконтактов соотношением - -1- ...сл-2Ъ ще а и b - расстояние от оси ведомой шестерни до электроконтактов, .смонтированных на планке; с - длина поворотного рычага. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 115,441, кл. В 21 D 15/12, 1957 .(прототип) ,. Риг. г .
/
Фиг Л .
